

nicaranha
-
Posts
12 -
Cadastrado em
-
Última visita
-

Outro Programando um robô para virar a 14 cm do obstáculo
nicaranha postou um tópico em Microcontroladores
Bem, eu estou fazendo um robô, ja contrui ele e tudo, mas a programação esta difícil, estou a muito tempo tentando e não consigo, aqui está o código: #include <Ultrassonico.h> #include <Servo.h> #define motoE1 6 //faz o motor Esquerdo ir para traz #define motoE2 7 //faz o motor Esquerdo ir para frente #define motoD1 8//faz o motor direito ir para traz #define motoD2 9//faz o motor direito ir para frente #define p_trigger 5 // dispara o som que vai ser rebatido #define p_echo 4 // recebe a onda de som int viraservo; int viradireita; int viraesquerda; Servo sensor,garra; //servos da garra e da base do sensor float dist_cm; Ultrassonico ultrassonico(p_trigger, p_echo); void setup() { sensor.attach(2); garra.attach(3); viradireita = 180; viraesquerda = 0; pinMode(motoE1, OUTPUT); pinMode(motoE2, OUTPUT); pinMode(motoD1, OUTPUT); pinMode(motoD2, OUTPUT); digitalWrite (motoE1, LOW); digitalWrite (motoE2, LOW); digitalWrite (motoD1, LOW); digitalWrite (motoD2, LOW); sensor.write(90); garra.write(60); delay(100); } void loop() { dist_cm=ultrassonico.ditancia_cm(); if (dist_cm >= 14.00 ){ digitalWrite (motoE2, HIGH); digitalWrite (motoD2, HIGH); }else{ digitalWrite (motoE2, LOW); digitalWrite(motoD2, LOW); if(dist_cm <=14.00){ viraservo = viradireita; sensor.write(viraservo); if(dist_cm >14.00){ digitalWrite(motoE2, HIGH); digitalWrite(motoD1,HIGH); delay(500); }else { viraservo = viraesquerda; sensor.write(viraservo); if(dist_cm >14.00){ digitalWrite(motoE1, HIGH); digitalWrite(motoD2,HIGH); delay(500); } } } } } O que eu queria fazer era o robô seguir em frente mas quando chegar a 14.00 cm da parede ele parar virar o sensor para a direita e caso tenha distancia o suficiente ele virar para a direita, caso contrario ele vira o sensor para a esquerda e caso tenha distância suficente ele vira para a esquerda, o robo possui 3 rodas 2 com motor e uma roda guia, coloquei uma placa H l298 que permite que o motor vire para os dois lados, e até a parte de chegar na parede e parar eu consegui porém depois disso o sensor fica maluko virando de um lado para o outro, Eu agradeceriam s alguem podesse me dar uma ideia de como resolver isso -
Eu andei pesquisando pela internet e vejo muitos cursos de programação e fico indeciso em qual escolher, gostaria da recomendação de algum curso que ensine tudo para se tornar um bom programador, com varias linguas de programação, lógica e tudo de importante
-
nicaranha alterou sua foto pessoal
-
quando corrente passa tipo por um fio ela gera um campo elétromagnético né ?Mas como saber onde fica o norte e o sul desse campo ?
-
Eu Buguei aqui, por que o capacitor está sendo descarregado ?Transistor pode conduzir do emissor para o coletor ?Um LED não deveria conduzir do catodo pro anodo ?

-
@Wal SJC valeu, eu tinha visto num site e la tava errado
-
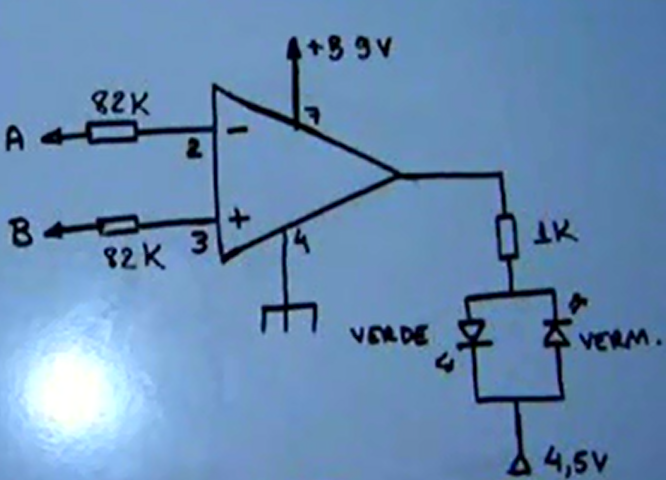
Como deixar a tensão alternada em continua positiva e negativa ? Quando a tensão alterna para positiva a corrente pode conduzir por um diodo e fica pulsante mas e a tensão ela fica pulsante também ? mas dai não iria só passar a parte positiva ? e a negativa ? Eu buguei aqui
-
Como o ponto que os leds estão conectados se adapta a tensão que sai do CI, já que pode ser positiva ou negativa, como aquele ponto serve de positivo ou negativo dependendo da situação ?
-
Tipo por que quando ta em série não importa se ele está no polo negativo ou positivo a tensão não vai do negativo para o positivo ?
-
@arfneto @Mauro Britivaldo Valeu ai
-
Estou na duvida de como se usa const char* em alguns lugares tem char* const e alguns falam que é o mesmo que string nome="nome"; #include<iostream> using namespace std; int main() { const char* nome="Alexa"; for (int i=0;i<=sizeof(nome);i++){ cout << nome[i] << endl; return 0; } Nesse código aqui const char* funciona mas string não por que ?
-
@arfneto Valeu me ajudou muito adicionado 0 minutos depois @herbertbahia Ajudou pacas
-
Eu sou muito burro e não consigo entender de forma alguma pra que std e :: servem por exemplo essa .h aqui: #ifndef AVIAO_H_INCLUDED #define AVIAO_H_INCLUDED class Aviao{ public: int vel=0; int velMax; std::string tipo; Aviao(int tp); void imprimir(); private: };, Aviao::Aviao(int tp){ if(tp==1){ tipo="Jato"; velMax=800; }else if (tp==2){ tipo="Monomotor"; velMax=350; }else if (tp==3){ tipo="Planador"; velMax=180; } } void Aviao::imprimir(){ std::cout << "Tipo.............: " << tipo << std::endl; std::cout << "Velocidade Maxima: " << velMax << std::endl; std::cout << "Velocidade Atual.: " << vel << std::endl ; std::cout <<"-----------------------" << std::endl; } #endif // AVIAO_H_INCLUDED Eu não sei o por que desses std e :: e também me questiono sobre o que é método construtor, se algém poder me explicar de uma maneira bem simples mas completa eu agradeceria.





Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais