

carlos.camj
-
Posts
48 -
Cadastrado em
-
Última visita
-
Arduino Como acionar compressor BLDC com Arduino
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
Teria que usar um comparador para pegar os sinais Back-EMF e verificar a posição do rotor e com isso ir corrigindo a modulação conforme a posição. -
Arduino Como acionar compressor BLDC com Arduino
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
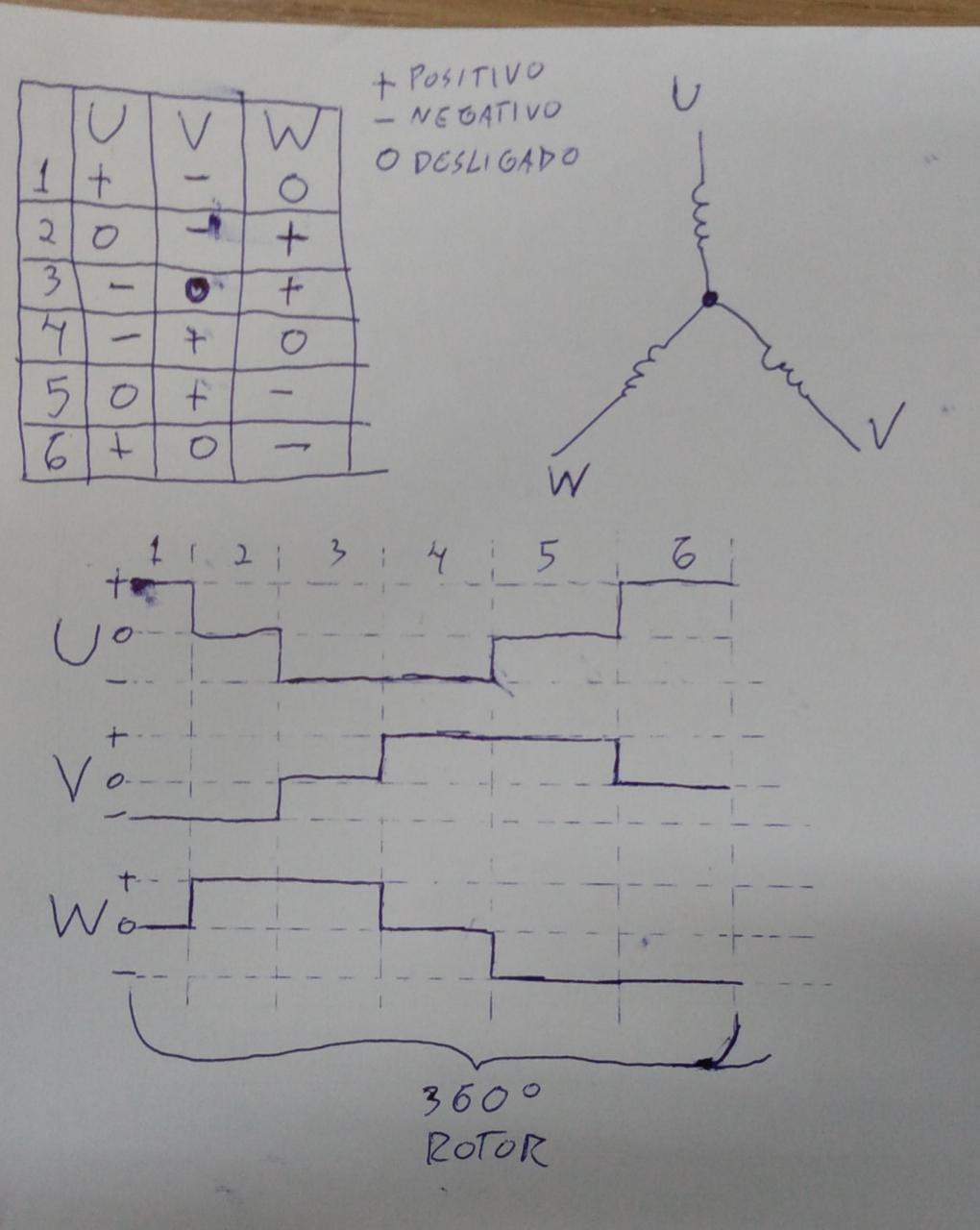
@aphawk @.if Essa minha maior duvida tb, entender qual a frequência e defasagem entre as fases. A programação no arduino acredito que não irá dar trabalho. Na teoria o motor Brushless (BLDC) teria que ter essa sequencia de acionamento nas bobinas, mas na pratica não funcionou muito bem. o motor até ligou, mas ficou com muito ruido, barulho estranho. tentei alterar a frequencia e sequencia das bobinas, mas sem sucesso.
-
Arduino Como acionar compressor BLDC com Arduino
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
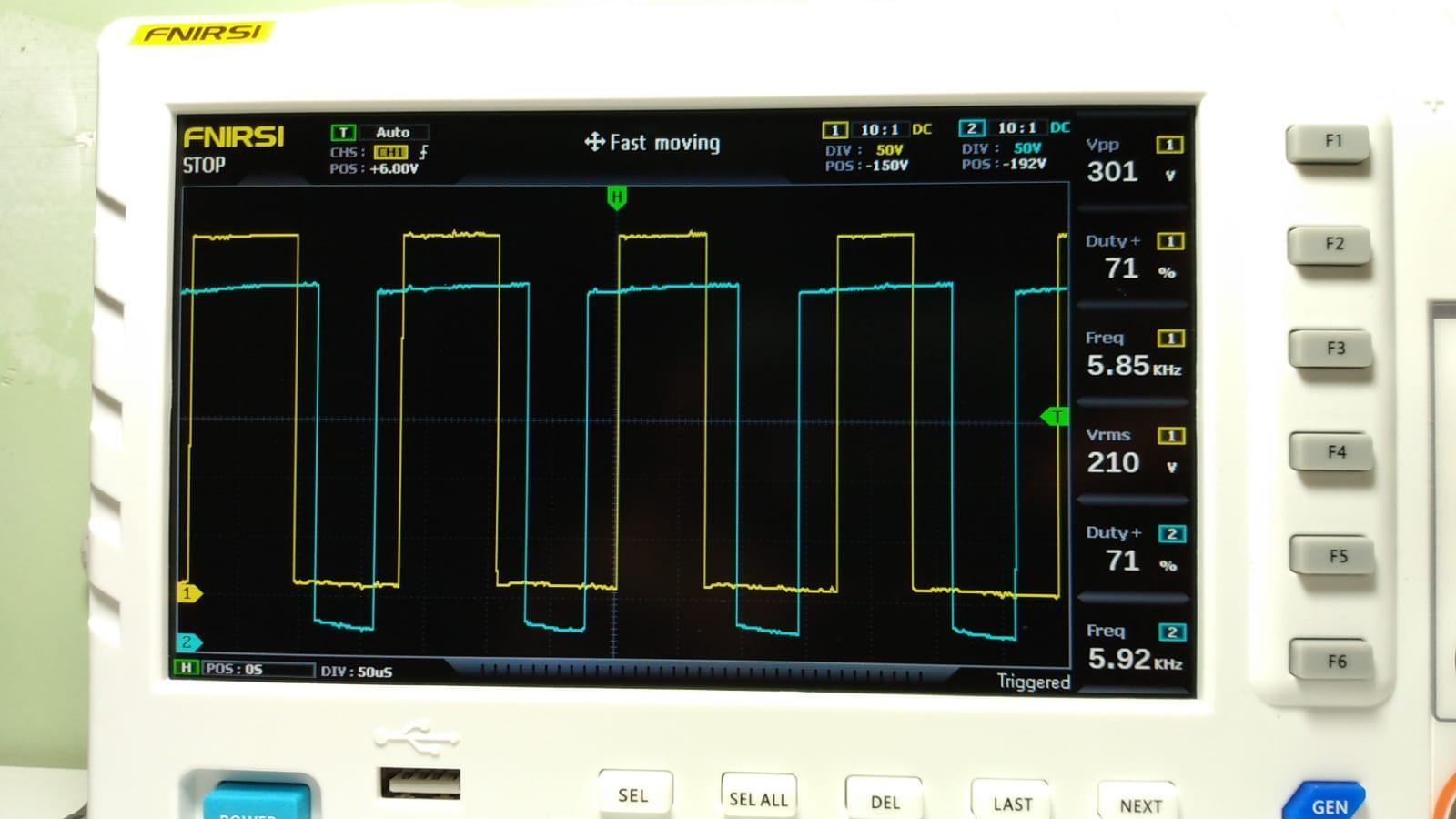
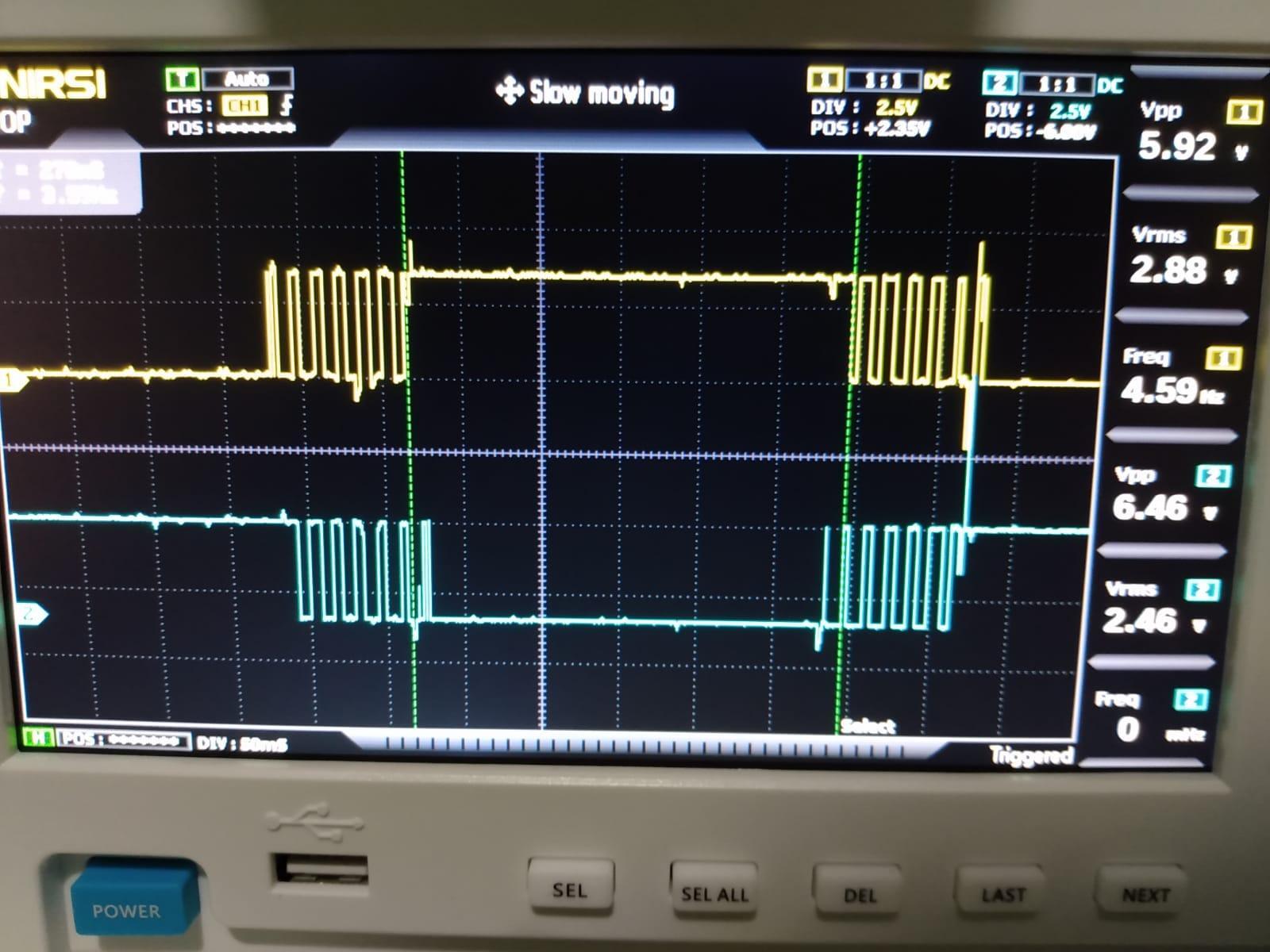
@.if Meu osc é probrezinho mesmo. Mas enfim, já estou procurando e estudando sobre o assunto na net. mas não consegui achar muito coisa. Mas pelo que estudei, motores BLDC não podem e nem funciona em um rede 220VCA trifásico, precisa receber um tensão modulada para acionar. Alguns compressores utiliza sensores de efeito hall ou a própria tensão geradas na bobinas ociosas (a bobinas do compressor, aciona duas por vez) para identificar a posição do rotor. Vou continuar estudando e aguarda se alguma alma caridosa que conheça bem do assunto, possa me ajudar. Obrigado pela atenção Esta imagem são duas formas de ondas de duas das três fases que vai para o compressor, com a ponta do osc com referencia para o negativo. Como disse, essa é só parte que esta modulando, em alguns ms a tensão fica fixa no positivo (300VDC) e depois de outra modulação fica fixa no negativo. -
Arduino Como acionar compressor BLDC com Arduino
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
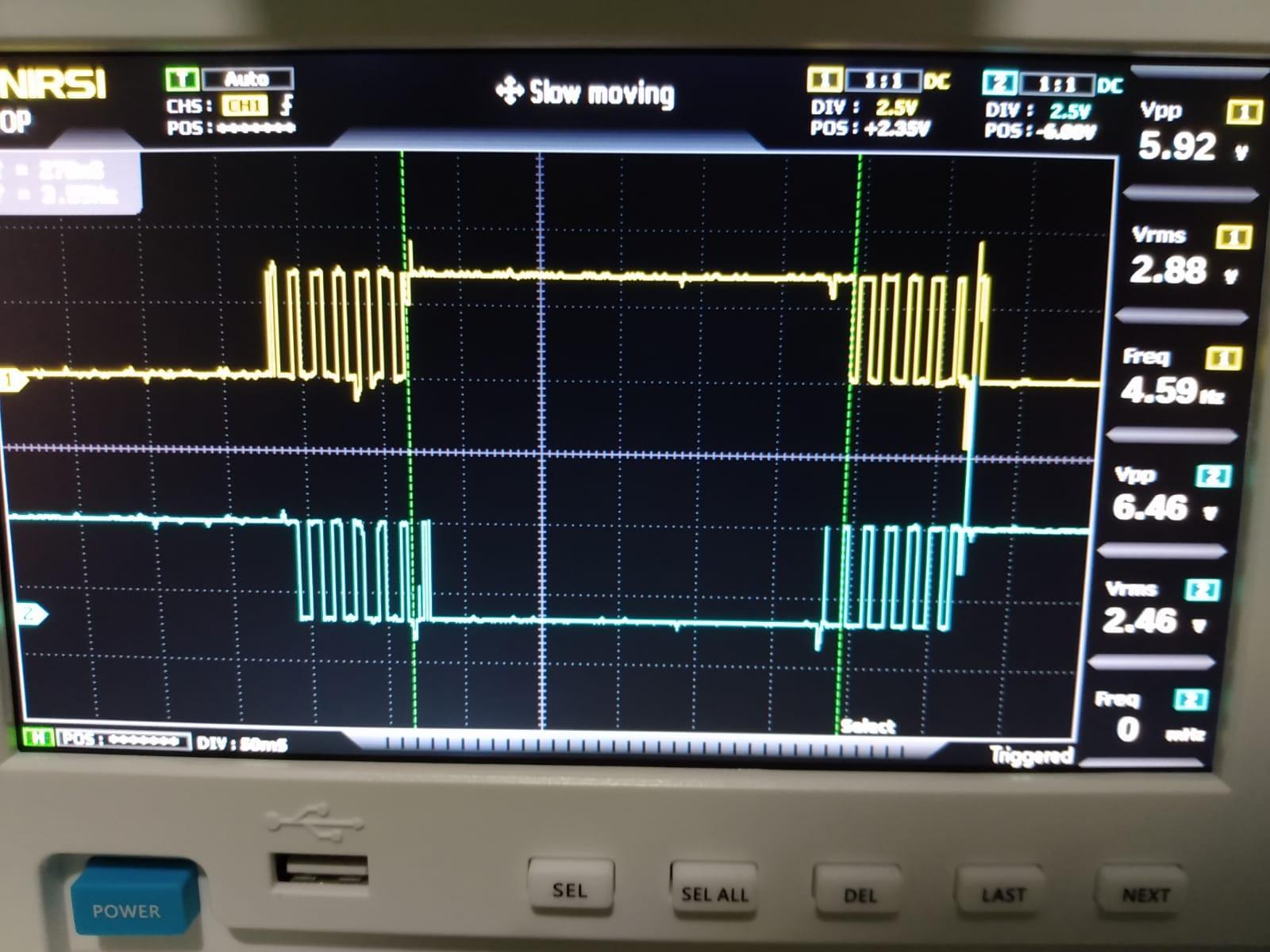
@.if quando dou zoom, só consigo pegar a parte que esta modulando. por que a onda modula variando o duty cicle e fica alguns ms em nivel alto e depois faz o inversor, modula e fica alguns instantes em nivel baixo. Mas como pode ver, essa imagem é entre duas fases. elas iniciam junto a modulação e depois ficam juntas em nivel alto e baixo, como mostrado nas primeiras imagens. Muito estranho ou eu que sou muito leigo no assunto
-
Arduino Como acionar compressor BLDC com Arduino
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@.if Vou enviar outras imagens com zoom assim que chegar em casa. Mas eu gostaria de saber como faço esse tipo de modulação com arduino??? -
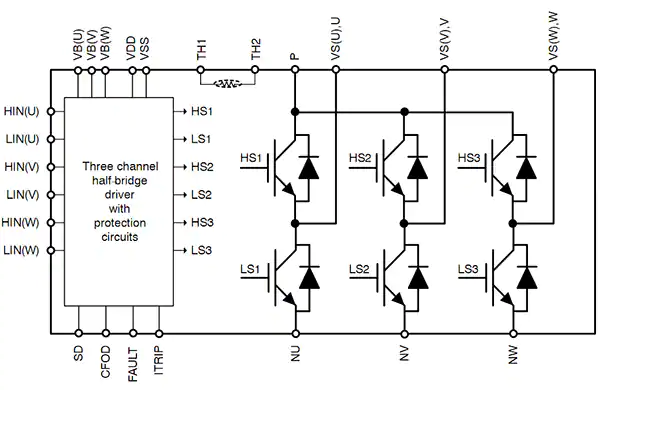
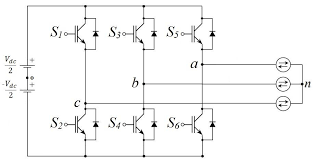
Olá Pessoal!!!! Peguei essas formas de onda com osciloscópio de um acionamento de compressor BLDC, utilizado em aparelhos de ar condicionado. O funcionamento básico conforme a terceira imagem é que o microprocessador manda 6 sinais PWM para o módulo IGBT, onde cada 2 IGBTs chaveiam para um fase, um para o positivo e outro para negativo. A primeira imagem é a saida de duas fases para o compressor com referencia para o negativo, a segunda imagem é dois sinais que vem do microprocessador para chavear dois IBTs da mesma fase, quando um esta em nivel lógico baixo o outro esta em alto. A forma de onde da terceira imagem para o compressor parece estar tentando imitar uma senoide. mas o que achei estranho que não tem defasem entre elas. Minha duvida é como fazer um programa com arduino para fazer esse tipo de modulação para acionar o compressor BLDC?
-
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@Thiago Miotto Ola. Tentei fazer o esquema que esta no tutorial mas como eu não tenho muita experiencia em programação estou com algumas duvidas ainda. - Este video que programa com cabo USB, iria programar com qual software, teria a ver com o tutorial? - Para atualizar o firmware do teclado USB HID genérico tem ser só com o UNO? - Eu instalei o programa Flip que pede no guia oficial do arduino para atualizar Atmega8U2 e 16U2 usando o DFU, e no tutorial pede para dar uns comando, seria no Flip que executo este comandos? sudo dfu-programmer at90usb82 apagar sudo dfu-programmer at90usb82 flash --debug 1 Arduino-usbserial.hex sudo dfu-programmer at90usb82 reset -
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@Thiago Miotto Acho que este material que está no link pode ser que de certo, Quando tiver um tempo vou tentar fazer. Obrigado -
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@Thiago Miotto @vtrx @.if Quando comprei o Leonardo eu gravei o Bootlooder nele. Então eu tenho que tirar o Bootlooder e de algum jeito consegui programar? Olhe este Link. Aqui explica a função do Bootlooder e como programar sem ele. Seria +- isso o caminho?https://www.filipeflop.com/blog/pra-que-serve-um-bootloader-arduino-uno/ -
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@vtrx Já voltei como tava. Puts ai complicou. Não tenho nem ideia como iria programar sem a IDE do Arduino. O PS4 e o Notebook reconhece o Leonardo como teclado, mas esse dispositivo não reconhece. Acho que não vai compensa o trabalho. Mas muito obrigado por me ajudar. -
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
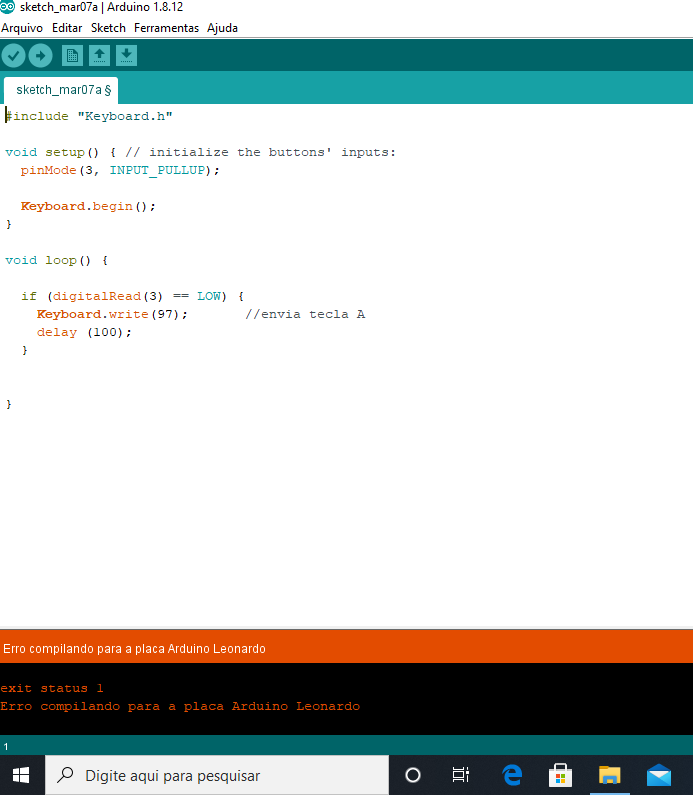
@vtrx Da erro ao compilar
-
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@vtrx Ok. Vou tentar fazer isso e depois te digo como ficou. Obrigado por enquanto. -
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@Thiago Miotto Segue HID.h /* Copyright (C) 2011 Circuits At Home, LTD. All rights reserved. This software may be distributed and modified under the terms of the GNU General Public License version 2 (GPL2) as published by the Free Software Foundation and appearing in the file GPL2.TXT included in the packaging of this file. Please note that GPL2 Section 2[b] requires that all works based on this software must also be made publicly available under the terms of the GPL2 ("Copyleft"). Contact information ------------------- Circuits At Home, LTD Web : http://www.circuitsathome.com e-mail : [email protected] */ #if !defined(__HID_H__) #define __HID_H__ #include "Usb.h" #include "hidusagestr.h" #define MAX_REPORT_PARSERS 2 #define HID_MAX_HID_CLASS_DESCRIPTORS 5 #define DATA_SIZE_MASK 0x03 #define TYPE_MASK 0x0C #define TAG_MASK 0xF0 #define DATA_SIZE_0 0x00 #define DATA_SIZE_1 0x01 #define DATA_SIZE_2 0x02 #define DATA_SIZE_4 0x03 #define TYPE_MAIN 0x00 #define TYPE_GLOBAL 0x04 #define TYPE_LOCAL 0x08 #define TAG_MAIN_INPUT 0x80 #define TAG_MAIN_OUTPUT 0x90 #define TAG_MAIN_COLLECTION 0xA0 #define TAG_MAIN_FEATURE 0xB0 #define TAG_MAIN_ENDCOLLECTION 0xC0 #define TAG_GLOBAL_USAGEPAGE 0x00 #define TAG_GLOBAL_LOGICALMIN 0x10 #define TAG_GLOBAL_LOGICALMAX 0x20 #define TAG_GLOBAL_PHYSMIN 0x30 #define TAG_GLOBAL_PHYSMAX 0x40 #define TAG_GLOBAL_UNITEXP 0x50 #define TAG_GLOBAL_UNIT 0x60 #define TAG_GLOBAL_REPORTSIZE 0x70 #define TAG_GLOBAL_REPORTID 0x80 #define TAG_GLOBAL_REPORTCOUNT 0x90 #define TAG_GLOBAL_PUSH 0xA0 #define TAG_GLOBAL_POP 0xB0 #define TAG_LOCAL_USAGE 0x00 #define TAG_LOCAL_USAGEMIN 0x10 #define TAG_LOCAL_USAGEMAX 0x20 /* HID requests */ #define bmREQ_HID_OUT USB_SETUP_HOST_TO_DEVICE|USB_SETUP_TYPE_CLASS|USB_SETUP_RECIPIENT_INTERFACE #define bmREQ_HID_IN USB_SETUP_DEVICE_TO_HOST|USB_SETUP_TYPE_CLASS|USB_SETUP_RECIPIENT_INTERFACE #define bmREQ_HID_REPORT USB_SETUP_DEVICE_TO_HOST|USB_SETUP_TYPE_STANDARD|USB_SETUP_RECIPIENT_INTERFACE /* HID constants. Not part of chapter 9 */ /* Class-Specific Requests */ #define HID_REQUEST_GET_REPORT 0x01 #define HID_REQUEST_GET_IDLE 0x02 #define HID_REQUEST_GET_PROTOCOL 0x03 #define HID_REQUEST_SET_REPORT 0x09 #define HID_REQUEST_SET_IDLE 0x0A #define HID_REQUEST_SET_PROTOCOL 0x0B /* Class Descriptor Types */ #define HID_DESCRIPTOR_HID 0x21 #define HID_DESCRIPTOR_REPORT 0x22 #define HID_DESRIPTOR_PHY 0x23 /* Protocol Selection */ #define HID_BOOT_PROTOCOL 0x00 #define HID_RPT_PROTOCOL 0x01 /* HID Interface Class Code */ #define HID_INTF 0x03 /* HID Interface Class SubClass Codes */ #define HID_BOOT_INTF_SUBCLASS 0x01 /* HID Interface Class Protocol Codes */ #define HID_PROTOCOL_NONE 0x00 #define HID_PROTOCOL_KEYBOARD 0x01 #define HID_PROTOCOL_MOUSE 0x02 #define HID_ITEM_TYPE_MAIN 0 #define HID_ITEM_TYPE_GLOBAL 1 #define HID_ITEM_TYPE_LOCAL 2 #define HID_ITEM_TYPE_RESERVED 3 #define HID_LONG_ITEM_PREFIX 0xfe // Long item prefix value #define bmHID_MAIN_ITEM_TAG 0xfc // Main item tag mask #define bmHID_MAIN_ITEM_INPUT 0x80 // Main item Input tag value #define bmHID_MAIN_ITEM_OUTPUT 0x90 // Main item Output tag value #define bmHID_MAIN_ITEM_FEATURE 0xb0 // Main item Feature tag value #define bmHID_MAIN_ITEM_COLLECTION 0xa0 // Main item Collection tag value #define bmHID_MAIN_ITEM_END_COLLECTION 0xce // Main item End Collection tag value #define HID_MAIN_ITEM_COLLECTION_PHYSICAL 0 #define HID_MAIN_ITEM_COLLECTION_APPLICATION 1 #define HID_MAIN_ITEM_COLLECTION_LOGICAL 2 #define HID_MAIN_ITEM_COLLECTION_REPORT 3 #define HID_MAIN_ITEM_COLLECTION_NAMED_ARRAY 4 #define HID_MAIN_ITEM_COLLECTION_USAGE_SWITCH 5 #define HID_MAIN_ITEM_COLLECTION_USAGE_MODIFIER 6 struct HidItemPrefix { uint8_t bSize : 2; uint8_t bType : 2; uint8_t bTag : 4; }; struct MainItemIOFeature { uint8_t bmIsConstantOrData : 1; uint8_t bmIsArrayOrVariable : 1; uint8_t bmIsRelativeOrAbsolute : 1; uint8_t bmIsWrapOrNoWrap : 1; uint8_t bmIsNonLonearOrLinear : 1; uint8_t bmIsNoPreferedOrPrefered : 1; uint8_t bmIsNullOrNoNull : 1; uint8_t bmIsVolatileOrNonVolatile : 1; }; class HID; class HIDReportParser { public: virtual void Parse(HID *hid, bool is_rpt_id, uint8_t len, uint8_t *buf) = 0; }; class HID : public USBDeviceConfig, public UsbConfigXtracter { protected: USB *pUsb; // USB class instance pointer uint8_t bAddress; // address protected: static const uint8_t epInterruptInIndex = 1; // InterruptIN endpoint index static const uint8_t epInterruptOutIndex = 2; // InterruptOUT endpoint index static const uint8_t maxHidInterfaces = 3; static const uint8_t maxEpPerInterface = 2; static const uint8_t totalEndpoints = (maxHidInterfaces * maxEpPerInterface + 1); void PrintEndpointDescriptor(const USB_ENDPOINT_DESCRIPTOR* ep_ptr); void PrintHidDescriptor(const USB_HID_DESCRIPTOR *pDesc); virtual HIDReportParser* GetReportParser(uint8_t id) { return NULL; }; public: HID(USB *pusb) : pUsb(pusb) { }; const USB* GetUsb() { return pUsb; }; virtual bool SetReportParser(uint8_t id, HIDReportParser *prs) { return false; }; uint8_t SetProtocol(uint8_t iface, uint8_t protocol); uint8_t GetProtocol(uint8_t iface, uint8_t* dataptr); uint8_t GetIdle(uint8_t iface, uint8_t reportID, uint8_t* dataptr); uint8_t SetIdle(uint8_t iface, uint8_t reportID, uint8_t duration); uint8_t GetReportDescr(uint16_t wIndex, USBReadParser *parser = NULL); uint8_t GetHidDescr(uint8_t ep, uint16_t nbytes, uint8_t* dataptr); uint8_t GetReport(uint8_t ep, uint8_t iface, uint8_t report_type, uint8_t report_id, uint16_t nbytes, uint8_t* dataptr); uint8_t SetReport(uint8_t ep, uint8_t iface, uint8_t report_type, uint8_t report_id, uint16_t nbytes, uint8_t* dataptr); }; #endif // __HID_H__ @vtrx Segue codigo que achei em C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino\USBCore.cpp /* Copyright (c) 2010, Peter Barrett ** Sleep/Wakeup support added by Michael Dreher ** ** Permission to use, copy, modify, and/or distribute this software for ** any purpose with or without fee is hereby granted, provided that the ** above copyright notice and this permission notice appear in all copies. ** ** THE SOFTWARE IS PROVIDED "AS IS" AND THE AUTHOR DISCLAIMS ALL ** WARRANTIES WITH REGARD TO THIS SOFTWARE INCLUDING ALL IMPLIED ** WARRANTIES OF MERCHANTABILITY AND FITNESS. IN NO EVENT SHALL THE AUTHOR ** BE LIABLE FOR ANY SPECIAL, DIRECT, INDIRECT, OR CONSEQUENTIAL DAMAGES ** OR ANY DAMAGES WHATSOEVER RESULTING FROM LOSS OF USE, DATA OR PROFITS, ** WHETHER IN AN ACTION OF CONTRACT, NEGLIGENCE OR OTHER TORTIOUS ACTION, ** ARISING OUT OF OR IN CONNECTION WITH THE USE OR PERFORMANCE OF THIS ** SOFTWARE. */ #include "USBAPI.h" #include "PluggableUSB.h" #include <stdlib.h> #if defined(USBCON) /** Pulse generation counters to keep track of the number of milliseconds remaining for each pulse type */ #define TX_RX_LED_PULSE_MS 100 volatile u8 TxLEDPulse; /**< Milliseconds remaining for data Tx LED pulse */ volatile u8 RxLEDPulse; /**< Milliseconds remaining for data Rx LED pulse */ //================================================================== //================================================================== extern const u16 STRING_LANGUAGE[] PROGMEM; extern const u8 STRING_PRODUCT[] PROGMEM; extern const u8 STRING_MANUFACTURER[] PROGMEM; extern const DeviceDescriptor USB_DeviceDescriptorIAD PROGMEM; const u16 STRING_LANGUAGE[2] = { (3<<8) | (2+2), 0x0409 // English }; #ifndef USB_PRODUCT // If no product is provided, use USB IO Board #define USB_PRODUCT "USB IO Board" #endif const u8 STRING_PRODUCT[] PROGMEM = USB_PRODUCT; #if USB_VID == 0x2341 # if defined(USB_MANUFACTURER) # undef USB_MANUFACTURER # endif # define USB_MANUFACTURER "Arduino LLC" #elif USB_VID == 0x1b4f # if defined(USB_MANUFACTURER) # undef USB_MANUFACTURER # endif # define USB_MANUFACTURER "SparkFun" #elif !defined(USB_MANUFACTURER) // Fall through to unknown if no manufacturer name was provided in a macro # define USB_MANUFACTURER "Unknown" #endif const u8 STRING_MANUFACTURER[] PROGMEM = USB_MANUFACTURER; #define DEVICE_CLASS 0x02 // DEVICE DESCRIPTOR const DeviceDescriptor USB_DeviceDescriptorIAD = D_DEVICE(0xEF,0x02,0x01,64,USB_VID,USB_PID,0x100,IMANUFACTURER,IPRODUCT,ISERIAL,1); //================================================================== //================================================================== volatile u8 _usbConfiguration = 0; volatile u8 _usbCurrentStatus = 0; // meaning of bits see usb_20.pdf, Figure 9-4. Information Returned by a GetStatus() Request to a Device volatile u8 _usbSuspendState = 0; // copy of UDINT to check SUSPI and WAKEUPI bits static inline void WaitIN(void) { while (!(UEINTX & (1<<TXINI))) ; } static inline void ClearIN(void) { UEINTX = ~(1<<TXINI); } static inline void WaitOUT(void) { while (!(UEINTX & (1<<RXOUTI))) ; } static inline u8 WaitForINOrOUT() { while (!(UEINTX & ((1<<TXINI)|(1<<RXOUTI)))) ; return (UEINTX & (1<<RXOUTI)) == 0; } static inline void ClearOUT(void) { UEINTX = ~(1<<RXOUTI); } static inline void Recv(volatile u8* data, u8 count) { while (count--) *data++ = UEDATX; RXLED1; // light the RX LED RxLEDPulse = TX_RX_LED_PULSE_MS; } static inline u8 Recv8() { RXLED1; // light the RX LED RxLEDPulse = TX_RX_LED_PULSE_MS; return UEDATX; } static inline void Send8(u8 d) { UEDATX = d; } static inline void SetEP(u8 ep) { UENUM = ep; } static inline u8 FifoByteCount() { return UEBCLX; } static inline u8 ReceivedSetupInt() { return UEINTX & (1<<RXSTPI); } static inline void ClearSetupInt() { UEINTX = ~((1<<RXSTPI) | (1<<RXOUTI) | (1<<TXINI)); } static inline void Stall() { UECONX = (1<<STALLRQ) | (1<<EPEN); } static inline u8 ReadWriteAllowed() { return UEINTX & (1<<RWAL); } static inline u8 Stalled() { return UEINTX & (1<<STALLEDI); } static inline u8 FifoFree() { return UEINTX & (1<<FIFOCON); } static inline void ReleaseRX() { UEINTX = 0x6B; // FIFOCON=0 NAKINI=1 RWAL=1 NAKOUTI=0 RXSTPI=1 RXOUTI=0 STALLEDI=1 TXINI=1 } static inline void ReleaseTX() { UEINTX = 0x3A; // FIFOCON=0 NAKINI=0 RWAL=1 NAKOUTI=1 RXSTPI=1 RXOUTI=0 STALLEDI=1 TXINI=0 } static inline u8 FrameNumber() { return UDFNUML; } //================================================================== //================================================================== u8 USBGetConfiguration(void) { return _usbConfiguration; } #define USB_RECV_TIMEOUT class LockEP { u8 _sreg; public: LockEP(u8 ep) : _sreg(SREG) { cli(); SetEP(ep & 7); } ~LockEP() { SREG = _sreg; } }; // Number of bytes, assumes a rx endpoint u8 USB_Available(u8 ep) { LockEP lock(ep); return FifoByteCount(); } // Non Blocking receive // Return number of bytes read int USB_Recv(u8 ep, void* d, int len) { if (!_usbConfiguration || len < 0) return -1; LockEP lock(ep); u8 n = FifoByteCount(); len = min(n,len); n = len; u8* dst = (u8*)d; while (n--) *dst++ = Recv8(); if (len && !FifoByteCount()) // release empty buffer ReleaseRX(); return len; } // Recv 1 byte if ready int USB_Recv(u8 ep) { u8 c; if (USB_Recv(ep,&c,1) != 1) return -1; return c; } // Space in send EP u8 USB_SendSpace(u8 ep) { LockEP lock(ep); if (!ReadWriteAllowed()) return 0; return USB_EP_SIZE - FifoByteCount(); } // Blocking Send of data to an endpoint int USB_Send(u8 ep, const void* d, int len) { if (!_usbConfiguration) return -1; if (_usbSuspendState & (1<<SUSPI)) { //send a remote wakeup UDCON |= (1 << RMWKUP); } int r = len; const u8* data = (const u8*)d; u8 timeout = 250; // 250ms timeout on send? TODO bool sendZlp = false; while (len || sendZlp) { u8 n = USB_SendSpace(ep); if (n == 0) { if (!(--timeout)) return -1; delay(1); continue; } if (n > len) { n = len; } { LockEP lock(ep); // Frame may have been released by the SOF interrupt handler if (!ReadWriteAllowed()) continue; len -= n; if (ep & TRANSFER_ZERO) { while (n--) Send8(0); } else if (ep & TRANSFER_PGM) { while (n--) Send8(pgm_read_byte(data++)); } else { while (n--) Send8(*data++); } if (sendZlp) { ReleaseTX(); sendZlp = false; } else if (!ReadWriteAllowed()) { // ...release if buffer is full... ReleaseTX(); if (len == 0) sendZlp = true; } else if ((len == 0) && (ep & TRANSFER_RELEASE)) { // ...or if forced with TRANSFER_RELEASE // XXX: TRANSFER_RELEASE is never used can be removed? ReleaseTX(); } } } TXLED1; // light the TX LED TxLEDPulse = TX_RX_LED_PULSE_MS; return r; } u8 _initEndpoints[USB_ENDPOINTS] = { 0, // Control Endpoint EP_TYPE_INTERRUPT_IN, // CDC_ENDPOINT_ACM EP_TYPE_BULK_OUT, // CDC_ENDPOINT_OUT EP_TYPE_BULK_IN, // CDC_ENDPOINT_IN // Following endpoints are automatically initialized to 0 }; #define EP_SINGLE_64 0x32 // EP0 #define EP_DOUBLE_64 0x36 // Other endpoints #define EP_SINGLE_16 0x12 static void InitEP(u8 index, u8 type, u8 size) { UENUM = index; UECONX = (1<<EPEN); UECFG0X = type; UECFG1X = size; } static void InitEndpoints() { for (u8 i = 1; i < sizeof(_initEndpoints) && _initEndpoints[i] != 0; i++) { UENUM = i; UECONX = (1<<EPEN); UECFG0X = _initEndpoints[i]; #if USB_EP_SIZE == 16 UECFG1X = EP_SINGLE_16; #elif USB_EP_SIZE == 64 UECFG1X = EP_DOUBLE_64; #else #error Unsupported value for USB_EP_SIZE #endif } UERST = 0x7E; // And reset them UERST = 0; } // Handle CLASS_INTERFACE requests static bool ClassInterfaceRequest(USBSetup& setup) { u8 i = setup.wIndex; if (CDC_ACM_INTERFACE == i) return CDC_Setup(setup); #ifdef PLUGGABLE_USB_ENABLED return PluggableUSB().setup(setup); #endif return false; } static int _cmark; static int _cend; void InitControl(int end) { SetEP(0); _cmark = 0; _cend = end; } static bool SendControl(u8 d) { if (_cmark < _cend) { if (!WaitForINOrOUT()) return false; Send8(d); if (!((_cmark + 1) & 0x3F)) ClearIN(); // Fifo is full, release this packet } _cmark++; return true; } // Clipped by _cmark/_cend int USB_SendControl(u8 flags, const void* d, int len) { int sent = len; const u8* data = (const u8*)d; bool pgm = flags & TRANSFER_PGM; while (len--) { u8 c = pgm ? pgm_read_byte(data++) : *data++; if (!SendControl(c)) return -1; } return sent; } // Send a USB descriptor string. The string is stored in PROGMEM as a // plain ASCII string but is sent out as UTF-16 with the correct 2-byte // prefix static bool USB_SendStringDescriptor(const u8*string_P, u8 string_len, uint8_t flags) { SendControl(2 + string_len * 2); SendControl(3); bool pgm = flags & TRANSFER_PGM; for(u8 i = 0; i < string_len; i++) { bool r = SendControl(pgm ? pgm_read_byte(&string_P[i]) : string_P[i]); r &= SendControl(0); // high byte if(!r) { return false; } } return true; } // Does not timeout or cross fifo boundaries int USB_RecvControl(void* d, int len) { auto length = len; while(length) { // Dont receive more than the USB Control EP has to offer // Use fixed 64 because control EP always have 64 bytes even on 16u2. auto recvLength = length; if(recvLength > 64){ recvLength = 64; } // Write data to fit to the end (not the beginning) of the array WaitOUT(); Recv((u8*)d + len - length, recvLength); ClearOUT(); length -= recvLength; } return len; } static u8 SendInterfaces() { u8 interfaces = 0; CDC_GetInterface(&interfaces); #ifdef PLUGGABLE_USB_ENABLED PluggableUSB().getInterface(&interfaces); #endif return interfaces; } // Construct a dynamic configuration descriptor // This really needs dynamic endpoint allocation etc // TODO static bool SendConfiguration(int maxlen) { // Count and measure interfaces InitControl(0); u8 interfaces = SendInterfaces(); ConfigDescriptor config = D_CONFIG(_cmark + sizeof(ConfigDescriptor),interfaces); // Now send them InitControl(maxlen); USB_SendControl(0,&config,sizeof(ConfigDescriptor)); SendInterfaces(); return true; } static bool SendDescriptor(USBSetup& setup) { u8 t = setup.wValueH; if (USB_CONFIGURATION_DESCRIPTOR_TYPE == t) return SendConfiguration(setup.wLength); InitControl(setup.wLength); #ifdef PLUGGABLE_USB_ENABLED int ret = PluggableUSB().getDescriptor(setup); if (ret != 0) { return (ret > 0 ? true : false); } #endif const u8* desc_addr = 0; if (USB_DEVICE_DESCRIPTOR_TYPE == t) { desc_addr = (const u8*)&USB_DeviceDescriptorIAD; } else if (USB_STRING_DESCRIPTOR_TYPE == t) { if (setup.wValueL == 0) { desc_addr = (const u8*)&STRING_LANGUAGE; } else if (setup.wValueL == IPRODUCT) { return USB_SendStringDescriptor(STRING_PRODUCT, strlen(USB_PRODUCT), TRANSFER_PGM); } else if (setup.wValueL == IMANUFACTURER) { return USB_SendStringDescriptor(STRING_MANUFACTURER, strlen(USB_MANUFACTURER), TRANSFER_PGM); } else if (setup.wValueL == ISERIAL) { #ifdef PLUGGABLE_USB_ENABLED char name[ISERIAL_MAX_LEN]; PluggableUSB().getShortName(name); return USB_SendStringDescriptor((uint8_t*)name, strlen(name), 0); #endif } else return false; } if (desc_addr == 0) return false; u8 desc_length = pgm_read_byte(desc_addr); USB_SendControl(TRANSFER_PGM,desc_addr,desc_length); return true; } // Endpoint 0 interrupt ISR(USB_COM_vect) { SetEP(0); if (!ReceivedSetupInt()) return; USBSetup setup; Recv((u8*)&setup,8); ClearSetupInt(); u8 requestType = setup.bmRequestType; if (requestType & REQUEST_DEVICETOHOST) WaitIN(); else ClearIN(); bool ok = true; if (REQUEST_STANDARD == (requestType & REQUEST_TYPE)) { // Standard Requests u8 r = setup.bRequest; u16 wValue = setup.wValueL | (setup.wValueH << 8); if (GET_STATUS == r) { if (requestType == (REQUEST_DEVICETOHOST | REQUEST_STANDARD | REQUEST_DEVICE)) { Send8(_usbCurrentStatus); Send8(0); } else { // TODO: handle the HALT state of an endpoint here // see "Figure 9-6. Information Returned by a GetStatus() Request to an Endpoint" in usb_20.pdf for more information Send8(0); Send8(0); } } else if (CLEAR_FEATURE == r) { if((requestType == (REQUEST_HOSTTODEVICE | REQUEST_STANDARD | REQUEST_DEVICE)) && (wValue == DEVICE_REMOTE_WAKEUP)) { _usbCurrentStatus &= ~FEATURE_REMOTE_WAKEUP_ENABLED; } } else if (SET_FEATURE == r) { if((requestType == (REQUEST_HOSTTODEVICE | REQUEST_STANDARD | REQUEST_DEVICE)) && (wValue == DEVICE_REMOTE_WAKEUP)) { _usbCurrentStatus |= FEATURE_REMOTE_WAKEUP_ENABLED; } } else if (SET_ADDRESS == r) { WaitIN(); UDADDR = setup.wValueL | (1<<ADDEN); } else if (GET_DESCRIPTOR == r) { ok = SendDescriptor(setup); } else if (SET_DESCRIPTOR == r) { ok = false; } else if (GET_CONFIGURATION == r) { Send8(1); } else if (SET_CONFIGURATION == r) { if (REQUEST_DEVICE == (requestType & REQUEST_RECIPIENT)) { InitEndpoints(); _usbConfiguration = setup.wValueL; } else ok = false; } else if (GET_INTERFACE == r) { } else if (SET_INTERFACE == r) { } } else { InitControl(setup.wLength); // Max length of transfer ok = ClassInterfaceRequest(setup); } if (ok) ClearIN(); else { Stall(); } } void USB_Flush(u8 ep) { SetEP(ep); if (FifoByteCount()) ReleaseTX(); } static inline void USB_ClockDisable() { #if defined(OTGPADE) USBCON = (USBCON & ~(1<<OTGPADE)) | (1<<FRZCLK); // freeze clock and disable VBUS Pad #else // u2 Series USBCON = (1 << FRZCLK); // freeze clock #endif PLLCSR &= ~(1<<PLLE); // stop PLL } static inline void USB_ClockEnable() { #if defined(UHWCON) UHWCON |= (1<<UVREGE); // power internal reg #endif USBCON = (1<<USBE) | (1<<FRZCLK); // clock frozen, usb enabled // ATmega32U4 #if defined(PINDIV) #if F_CPU == 16000000UL PLLCSR |= (1<<PINDIV); // Need 16 MHz xtal #elif F_CPU == 8000000UL PLLCSR &= ~(1<<PINDIV); // Need 8 MHz xtal #else #error "Clock rate of F_CPU not supported" #endif #elif defined(__AVR_AT90USB82__) || defined(__AVR_AT90USB162__) || defined(__AVR_ATmega32U2__) || defined(__AVR_ATmega16U2__) || defined(__AVR_ATmega8U2__) // for the u2 Series the datasheet is confusing. On page 40 its called PINDIV and on page 290 its called PLLP0 #if F_CPU == 16000000UL // Need 16 MHz xtal PLLCSR |= (1 << PLLP0); #elif F_CPU == 8000000UL // Need 8 MHz xtal PLLCSR &= ~(1 << PLLP0); #endif // AT90USB646, AT90USB647, AT90USB1286, AT90USB1287 #elif defined(PLLP2) #if F_CPU == 16000000UL #if defined(__AVR_AT90USB1286__) || defined(__AVR_AT90USB1287__) // For Atmel AT90USB128x only. Do not use with Atmel AT90USB64x. PLLCSR = (PLLCSR & ~(1<<PLLP1)) | ((1<<PLLP2) | (1<<PLLP0)); // Need 16 MHz xtal #elif defined(__AVR_AT90USB646__) || defined(__AVR_AT90USB647__) // For AT90USB64x only. Do not use with AT90USB128x. PLLCSR = (PLLCSR & ~(1<<PLLP0)) | ((1<<PLLP2) | (1<<PLLP1)); // Need 16 MHz xtal #else #error "USB Chip not supported, please defined method of USB PLL initialization" #endif #elif F_CPU == 8000000UL // for Atmel AT90USB128x and AT90USB64x PLLCSR = (PLLCSR & ~(1<<PLLP2)) | ((1<<PLLP1) | (1<<PLLP0)); // Need 8 MHz xtal #else #error "Clock rate of F_CPU not supported" #endif #else #error "USB Chip not supported, please defined method of USB PLL initialization" #endif PLLCSR |= (1<<PLLE); while (!(PLLCSR & (1<<PLOCK))) // wait for lock pll { } // Some tests on specific versions of macosx (10.7.3), reported some // strange behaviors when the board is reset using the serial // port touch at 1200 bps. This delay fixes this behavior. delay(1); #if defined(OTGPADE) USBCON = (USBCON & ~(1<<FRZCLK)) | (1<<OTGPADE); // start USB clock, enable VBUS Pad #else USBCON &= ~(1 << FRZCLK); // start USB clock #endif #if defined(RSTCPU) #if defined(LSM) UDCON &= ~((1<<RSTCPU) | (1<<LSM) | (1<<RMWKUP) | (1<<DETACH)); // enable attach resistor, set full speed mode #else // u2 Series UDCON &= ~((1 << RSTCPU) | (1 << RMWKUP) | (1 << DETACH)); // enable attach resistor, set full speed mode #endif #else // AT90USB64x and AT90USB128x don't have RSTCPU UDCON &= ~((1<<LSM) | (1<<RMWKUP) | (1<<DETACH)); // enable attach resistor, set full speed mode #endif } // General interrupt ISR(USB_GEN_vect) { u8 udint = UDINT; UDINT &= ~((1<<EORSTI) | (1<<SOFI)); // clear the IRQ flags for the IRQs which are handled here, except WAKEUPI and SUSPI (see below) // End of Reset if (udint & (1<<EORSTI)) { InitEP(0,EP_TYPE_CONTROL,EP_SINGLE_64); // init ep0 _usbConfiguration = 0; // not configured yet UEIENX = 1 << RXSTPE; // Enable interrupts for ep0 } // Start of Frame - happens every millisecond so we use it for TX and RX LED one-shot timing, too if (udint & (1<<SOFI)) { USB_Flush(CDC_TX); // Send a tx frame if found // check whether the one-shot period has elapsed. if so, turn off the LED if (TxLEDPulse && !(--TxLEDPulse)) TXLED0; if (RxLEDPulse && !(--RxLEDPulse)) RXLED0; } // the WAKEUPI interrupt is triggered as soon as there are non-idle patterns on the data // lines. Thus, the WAKEUPI interrupt can occur even if the controller is not in the "suspend" mode. // Therefore the we enable it only when USB is suspended if (udint & (1<<WAKEUPI)) { UDIEN = (UDIEN & ~(1<<WAKEUPE)) | (1<<SUSPE); // Disable interrupts for WAKEUP and enable interrupts for SUSPEND //TODO // WAKEUPI shall be cleared by software (USB clock inputs must be enabled before). //USB_ClockEnable(); UDINT &= ~(1<<WAKEUPI); _usbSuspendState = (_usbSuspendState & ~(1<<SUSPI)) | (1<<WAKEUPI); } else if (udint & (1<<SUSPI)) // only one of the WAKEUPI / SUSPI bits can be active at time { UDIEN = (UDIEN & ~(1<<SUSPE)) | (1<<WAKEUPE); // Disable interrupts for SUSPEND and enable interrupts for WAKEUP //TODO //USB_ClockDisable(); UDINT &= ~((1<<WAKEUPI) | (1<<SUSPI)); // clear any already pending WAKEUP IRQs and the SUSPI request _usbSuspendState = (_usbSuspendState & ~(1<<WAKEUPI)) | (1<<SUSPI); } } // VBUS or counting frames // Any frame counting? u8 USBConnected() { u8 f = UDFNUML; delay(3); return f != UDFNUML; } //======================================================================= //======================================================================= USBDevice_ USBDevice; USBDevice_::USBDevice_() { } void USBDevice_::attach() { _usbConfiguration = 0; _usbCurrentStatus = 0; _usbSuspendState = 0; USB_ClockEnable(); UDINT &= ~((1<<WAKEUPI) | (1<<SUSPI)); // clear already pending WAKEUP / SUSPEND requests UDIEN = (1<<EORSTE) | (1<<SOFE) | (1<<SUSPE); // Enable interrupts for EOR (End of Reset), SOF (start of frame) and SUSPEND TX_RX_LED_INIT; } void USBDevice_::detach() { } // Check for interrupts // TODO: VBUS detection bool USBDevice_::configured() { return _usbConfiguration; } void USBDevice_::poll() { } bool USBDevice_::wakeupHost() { // clear any previous wakeup request which might have been set but could be processed at that time // e.g. because the host was not suspended at that time UDCON &= ~(1 << RMWKUP); if(!(UDCON & (1 << RMWKUP)) && (_usbSuspendState & (1<<SUSPI)) && (_usbCurrentStatus & FEATURE_REMOTE_WAKEUP_ENABLED)) { // This short version will only work, when the device has not been suspended. Currently the // Arduino core doesn't handle SUSPEND at all, so this is ok. USB_ClockEnable(); UDCON |= (1 << RMWKUP); // send the wakeup request return true; } return false; } bool USBDevice_::isSuspended() { return (_usbSuspendState & (1 << SUSPI)); } #endif /* if defined(USBCON) */ @vtrx Segue código C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino\Arduino.h /* Arduino.h - Main include file for the Arduino SDK Copyright (c) 2005-2013 Arduino Team. All right reserved. This library is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version. This library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details. You should have received a copy of the GNU Lesser General Public License along with this library; if not, write to the Free Software Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA */ #ifndef Arduino_h #define Arduino_h #include <stdlib.h> #include <stdbool.h> #include <string.h> #include <math.h> #include <avr/pgmspace.h> #include <avr/io.h> #include <avr/interrupt.h> #include "binary.h" #ifdef __cplusplus extern "C"{ #endif void yield(void); #define HIGH 0x1 #define LOW 0x0 #define INPUT 0x0 #define OUTPUT 0x1 #define INPUT_PULLUP 0x2 #define PI 3.1415926535897932384626433832795 #define HALF_PI 1.5707963267948966192313216916398 #define TWO_PI 6.283185307179586476925286766559 #define DEG_TO_RAD 0.017453292519943295769236907684886 #define RAD_TO_DEG 57.295779513082320876798154814105 #define EULER 2.718281828459045235360287471352 #define SERIAL 0x0 #define DISPLAY 0x1 #define LSBFIRST 0 #define MSBFIRST 1 #define CHANGE 1 #define FALLING 2 #define RISING 3 #if defined(__AVR_ATtiny24__) || defined(__AVR_ATtiny44__) || defined(__AVR_ATtiny84__) #define DEFAULT 0 #define EXTERNAL 1 #define INTERNAL1V1 2 #define INTERNAL INTERNAL1V1 #elif defined(__AVR_ATtiny25__) || defined(__AVR_ATtiny45__) || defined(__AVR_ATtiny85__) #define DEFAULT 0 #define EXTERNAL 4 #define INTERNAL1V1 8 #define INTERNAL INTERNAL1V1 #define INTERNAL2V56 9 #define INTERNAL2V56_EXTCAP 13 #else #if defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__) || defined(__AVR_ATmega1284__) || defined(__AVR_ATmega1284P__) || defined(__AVR_ATmega644__) || defined(__AVR_ATmega644A__) || defined(__AVR_ATmega644P__) || defined(__AVR_ATmega644PA__) #define INTERNAL1V1 2 #define INTERNAL2V56 3 #else #define INTERNAL 3 #endif #define DEFAULT 1 #define EXTERNAL 0 #endif // undefine stdlib's abs if encountered #ifdef abs #undef abs #endif #define min(a,b) ((a)<(b)?(a):(b)) #define max(a,b) ((a)>(b)?(a):(b)) #define abs(x) ((x)>0?(x):-(x)) #define constrain(amt,low,high) ((amt)<(low)?(low):((amt)>(high)?(high):(amt))) #define round(x) ((x)>=0?(long)((x)+0.5):(long)((x)-0.5)) #define radians(deg) ((deg)*DEG_TO_RAD) #define degrees(rad) ((rad)*RAD_TO_DEG) #define sq(x) ((x)*(x)) #define interrupts() sei() #define noInterrupts() cli() #define clockCyclesPerMicrosecond() ( F_CPU / 1000000L ) #define clockCyclesToMicroseconds(a) ( (a) / clockCyclesPerMicrosecond() ) #define microsecondsToClockCycles(a) ( (a) * clockCyclesPerMicrosecond() ) #define lowByte(w) ((uint8_t) ((w) & 0xff)) #define highByte(w) ((uint8_t) ((w) >> 8)) #define bitRead(value, bit) (((value) >> (bit)) & 0x01) #define bitSet(value, bit) ((value) |= (1UL << (bit))) #define bitClear(value, bit) ((value) &= ~(1UL << (bit))) #define bitToggle(value, bit) ((value) ^= (1UL << (bit))) #define bitWrite(value, bit, bitvalue) ((bitvalue) ? bitSet(value, bit) : bitClear(value, bit)) // avr-libc defines _NOP() since 1.6.2 #ifndef _NOP #define _NOP() do { __asm__ volatile ("nop"); } while (0) #endif typedef unsigned int word; #define bit(b) (1UL << (b)) typedef bool boolean; typedef uint8_t byte; void init(void); void initVariant(void); int atexit(void (*func)()) __attribute__((weak)); void pinMode(uint8_t pin, uint8_t mode); void digitalWrite(uint8_t pin, uint8_t val); int digitalRead(uint8_t pin); int analogRead(uint8_t pin); void analogReference(uint8_t mode); void analogWrite(uint8_t pin, int val); unsigned long millis(void); unsigned long micros(void); void delay(unsigned long ms); void delayMicroseconds(unsigned int us); unsigned long pulseIn(uint8_t pin, uint8_t state, unsigned long timeout); unsigned long pulseInLong(uint8_t pin, uint8_t state, unsigned long timeout); void shiftOut(uint8_t dataPin, uint8_t clockPin, uint8_t bitOrder, uint8_t val); uint8_t shiftIn(uint8_t dataPin, uint8_t clockPin, uint8_t bitOrder); void attachInterrupt(uint8_t interruptNum, void (*userFunc)(void), int mode); void detachInterrupt(uint8_t interruptNum); void setup(void); void loop(void); // Get the bit location within the hardware port of the given virtual pin. // This comes from the pins_*.c file for the active board configuration. #define analogInPinToBit(P) (P) // On the ATmega1280, the addresses of some of the port registers are // greater than 255, so we can't store them in uint8_t's. extern const uint16_t PROGMEM port_to_mode_PGM[]; extern const uint16_t PROGMEM port_to_input_PGM[]; extern const uint16_t PROGMEM port_to_output_PGM[]; extern const uint8_t PROGMEM digital_pin_to_port_PGM[]; // extern const uint8_t PROGMEM digital_pin_to_bit_PGM[]; extern const uint8_t PROGMEM digital_pin_to_bit_mask_PGM[]; extern const uint8_t PROGMEM digital_pin_to_timer_PGM[]; // Get the bit location within the hardware port of the given virtual pin. // This comes from the pins_*.c file for the active board configuration. // // These perform slightly better as macros compared to inline functions // #define digitalPinToPort(P) ( pgm_read_byte( digital_pin_to_port_PGM + (P) ) ) #define digitalPinToBitMask(P) ( pgm_read_byte( digital_pin_to_bit_mask_PGM + (P) ) ) #define digitalPinToTimer(P) ( pgm_read_byte( digital_pin_to_timer_PGM + (P) ) ) #define analogInPinToBit(P) (P) #define portOutputRegister(P) ( (volatile uint8_t *)( pgm_read_word( port_to_output_PGM + (P))) ) #define portInputRegister(P) ( (volatile uint8_t *)( pgm_read_word( port_to_input_PGM + (P))) ) #define portModeRegister(P) ( (volatile uint8_t *)( pgm_read_word( port_to_mode_PGM + (P))) ) #define NOT_A_PIN 0 #define NOT_A_PORT 0 #define NOT_AN_INTERRUPT -1 #ifdef ARDUINO_MAIN #define PA 1 #define PB 2 #define PC 3 #define PD 4 #define PE 5 #define PF 6 #define PG 7 #define PH 8 #define PJ 10 #define PK 11 #define PL 12 #endif #define NOT_ON_TIMER 0 #define TIMER0A 1 #define TIMER0B 2 #define TIMER1A 3 #define TIMER1B 4 #define TIMER1C 5 #define TIMER2 6 #define TIMER2A 7 #define TIMER2B 8 #define TIMER3A 9 #define TIMER3B 10 #define TIMER3C 11 #define TIMER4A 12 #define TIMER4B 13 #define TIMER4C 14 #define TIMER4D 15 #define TIMER5A 16 #define TIMER5B 17 #define TIMER5C 18 #ifdef __cplusplus } // extern "C" #endif #ifdef __cplusplus #include "WCharacter.h" #include "WString.h" #include "HardwareSerial.h" #include "USBAPI.h" #if defined(HAVE_HWSERIAL0) && defined(HAVE_CDCSERIAL) #error "Targets with both UART0 and CDC serial not supported" #endif uint16_t makeWord(uint16_t w); uint16_t makeWord(byte h, byte l); #define word(...) makeWord(__VA_ARGS__) unsigned long pulseIn(uint8_t pin, uint8_t state, unsigned long timeout = 1000000L); unsigned long pulseInLong(uint8_t pin, uint8_t state, unsigned long timeout = 1000000L); void tone(uint8_t _pin, unsigned int frequency, unsigned long duration = 0); void noTone(uint8_t _pin); // WMath prototypes long random(long); long random(long, long); void randomSeed(unsigned long); long map(long, long, long, long, long); #endif #include "pins_arduino.h" #endif -
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
@vtrx você chegou verificar o arquivo Keyboard.h em anexo. Eu achei esse código na biblioteca do arduino. -
Arduino Arduíno Leonardo como teclado USB
carlos.camj respondeu ao tópico de carlos.camj em Microcontroladores
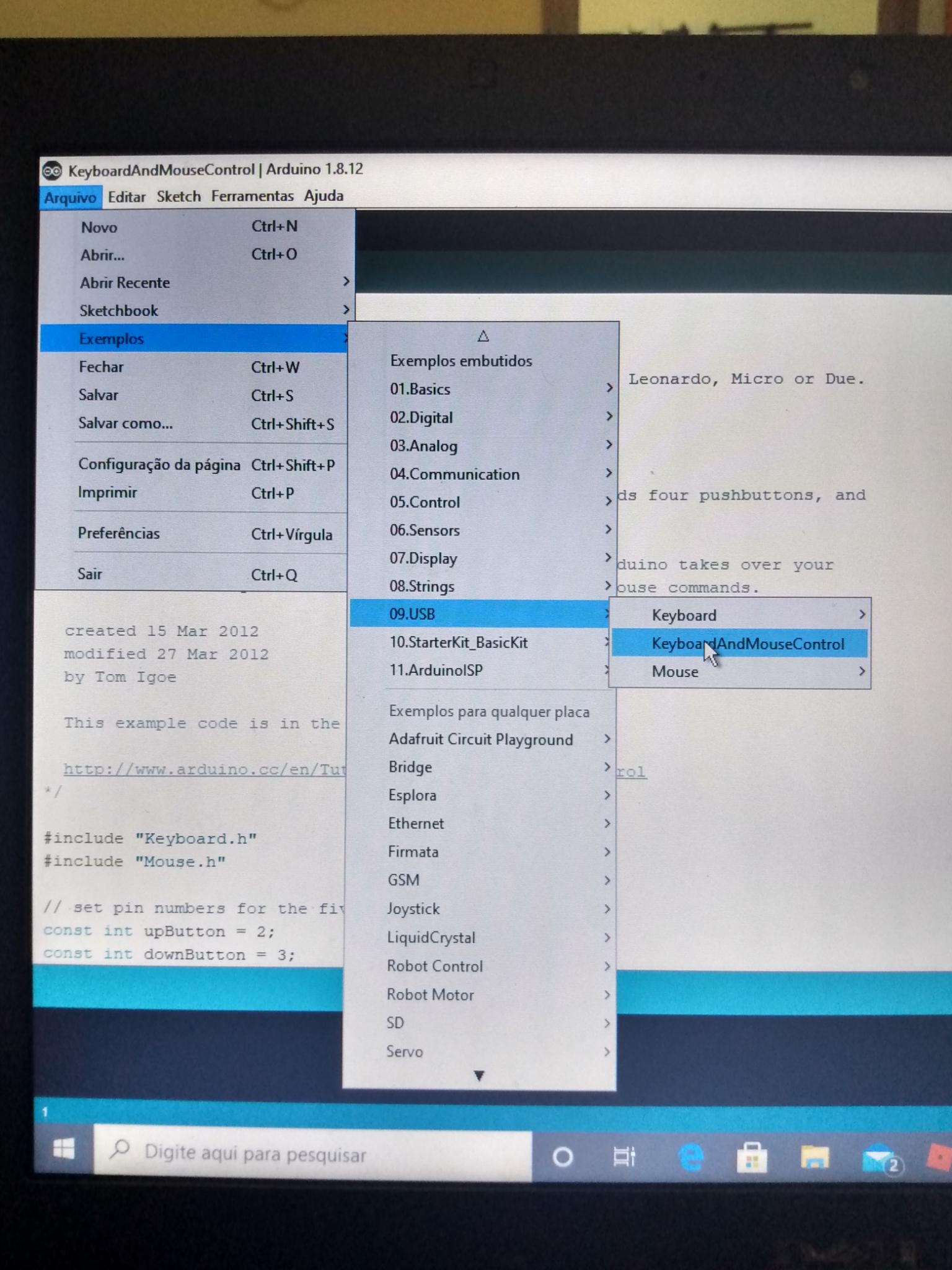
@Thiago Miotto @vtrxDescupe a demora, estava no trabalho. E o seguinte, eu peguei esse código nós exemplos na IDE do arduino ( segue foto em anexo) Eu exclui a parte do mouse e algumas outras. Deixei o programa simples só para enviar o carácter A em ASCII=97. Como Thiago disse, acho que você está querendo saber e do código fonte da biblioteca Keyboad.h. Verifiquei na biblioteca do arduino e achei esse código, acredito que é da biblioteca Keyboard.h. Não sei se fiz certo mais coloquei o código em word para poder anexar. Keyboard.h.docx

.jpeg.b8b9c97f5ac705532fd6f3e983e5e7b4.jpeg)
.jpeg.ec271b94e80f3ca86394e6ddba978b15.jpeg)
Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais