

Pablo Terra
-
Posts
40 -
Cadastrado em
-
Última visita
-
Prezados, bom dia! Preciso de um ajuda, estou montando um robo para combate em sumo, está todo configurado, mas existe uma regra: 'ele só pode sair do lugar, quando o RGB enxergar a cor verde e essa leitura será apenas uma única vez, isso é, ao ligar o carrinho', mas tem um porém, se eu executo isso no loop(), toda vez ele irá ler, sempre que reiniciar o loop, se eu executar no SETUP(), ele irá executar uma única vez, só que eu preciso que ele leia até que a cor seja verde. Como satisfazer tal condição? Executar o RGB dentro do SETUP(), uma única vez até que seja detectado verde.
-
Visual Basic Planilha excel concatenar com condição
Pablo Terra postou um tópico em Programação - outros
Prezados, bom dia! Me ajuda? Preciso concatenar células de acordo com o que existir em outra célula, exemplo, se C1 = 'a' e C2 = 'a' e C3 = B, concatenar apenas onde ter 'a'. Fiz assim, mas não resolve: =SE(G4:G43 = "Reprovado";CONCATENAR("Prezados, ";H4;" // ";H:H)) -
Visual Basic VBA comando select em Excel
Pablo Terra respondeu ao tópico de Pablo Terra em Programação - outros
Alguém? -
Visual Basic VBA comando select em Excel
Pablo Terra respondeu ao tópico de Pablo Terra em Programação - outros
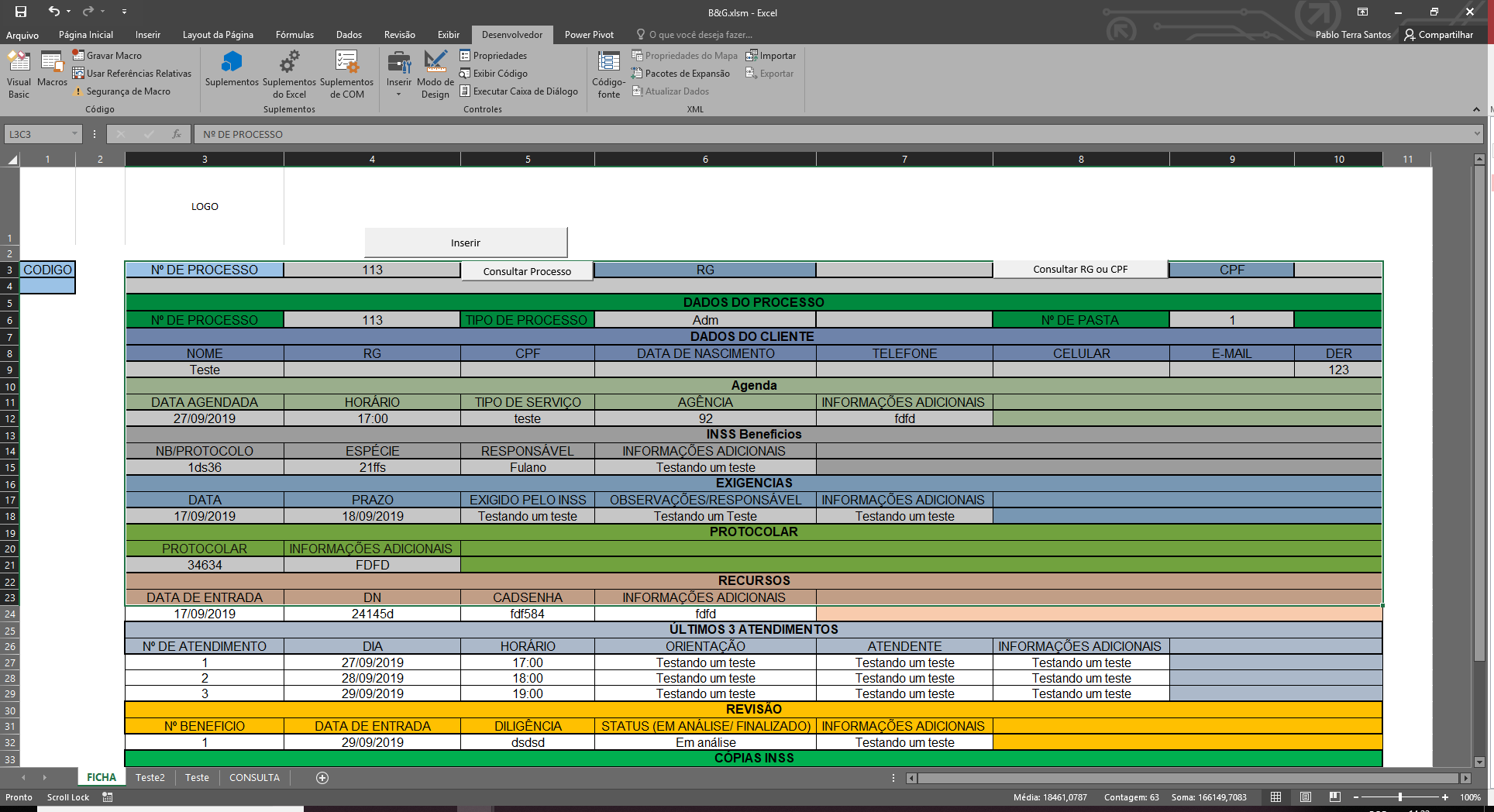
@Basole preciso que ao consultar por processo ele consulte no banco e retorne coluna por coluca de acordo com cada célula. Isso é, plotar o campo nome do processo 2 na célula correspondente ao nome e assim sucessivamente. -
Prezados, me ajudem?! Estou realizando uma planilha em Excel, onde preciso inserir, consultar e alterar. a inserção está correta mas estou com dificuldades quanto ao select, a planilha não segue coluna por coluna e sim é misturada linha por linha sigam fotos: Como fazer uma consulta para que ela insira a resposta célula por célula?

-
Excel Decisão com base em escolhas
Pablo Terra respondeu ao tópico de Pablo Terra em Microsoft Office e similares
@Eder Neumann seria legal um programa onde tivesse interações, o fluxograma é muito manual e massante para um usuário de ponta. Teria de ser algo mais dinâmico. -
Excel Decisão com base em escolhas
Pablo Terra respondeu ao tópico de Pablo Terra em Microsoft Office e similares
@Eder Neumann ele tem que ajudar a pessoa a tomar uma escolha diante de uma situação, isso é, Seguro Carro Popular <30mil -nao pode >30mil Pode Luxo <250 >250 Seguro caminhao 4 eixo Não pode Tipo isso -
Excel Decisão com base em escolhas
Pablo Terra respondeu ao tópico de Pablo Terra em Microsoft Office e similares
@Eder Neumann a ideia é que o programa facilite as análises de processos, isso é, seria como um manual Se a pessoa está implantando algo com 300 empresas, abre uma subjanela com o que ela precisa, se 500 outra subjanela ou hierarquia. -
Excel Decisão com base em escolhas
Pablo Terra respondeu ao tópico de Pablo Terra em Microsoft Office e similares
@Eder Neumann atende se for possível no mesmo -
Prezados, preciso de uma ajuda. Sou da área de TI, mas não na empresa ainda, e estou envolvido em um projeto que visa estabelecer escolhas com base em outras escolhas, Poderia eu criar um programa para isso com vários if-else mas a organização é restrita a ferramentas externas, para isso questiono. Existe alguma ferramenta da Microsoft que auxilia nessa questão, exemplo. Implantação Se 300 pessoas A B C Se 500 pessoas D E F Isso com uso de programas.
-
Arduino Arduino com erro na programação
Pablo Terra respondeu ao tópico de Pablo Terra em Microcontroladores
@Linguagem cJá corrigi, muito obrigado, era erro em um comentário, estava ***// e o certo é //*** -
Arduino Arduino com erro na programação
Pablo Terra respondeu ao tópico de Pablo Terra em Microcontroladores
@Linguagem c completo amigo, do início da biblioteca ao término de loop, nada a mais A //movimentos no final apenas comecei nas fiz nada -
Prezados, estou com problema na programação de meu Arduino, dá erro de “expected constructor, destructor, or type conversion before ‘ultrasonic’” na linha abaixo do código. Erro na linha abaixo: Ultrasonic ultrasonic(pino_trigger, pino_echo); Código: //Carrega a biblioteca do sensor ultrassonico #include <Ultrasonic.h> //Biblioteca sensor ultrassonico //#include <AFMotor.h> //Biblioteca comandos do motor (FORWARD, BACKWARD, RELEASE) #include <Servo.h> //Biblioteca para manuseio dos motores ***********************************************//Define os pinos //Sensor ultrasonico #define pino_trigger 4 #define pino_echo 5 //Led #define pin_led 13 //Define pino para led, contar delay //Motores #define motor_dir 1 //Define pino motor direito #define motor_esq 2 //Define pino motor esquerdo //Sensor de linha #define linha_dir 6 //Define pino sensor de linha direito #define linha_esq 7 //Define pino sensor de linha esquerdo //Inicializa o sensor ultrassonico / distância Ultrasonic ultrasonic(pino_trigger, pino_echo); void setup() { int cont_delay; //delay pinMode(pin_led, OUTPUT); pinMode(linha_dir, INPUT); pinMode(linha_esq, INPUT); for(cont_delay = 0; cont_delay<5; cont_delay++){ //digitalWrite(pin_led, HIGH); Serial.println(cont_delay); delay(700); //digitalWrite(pin_led, LOW); Serial.println(cont_delay); delay(300); Serial.println(cont_delay); } Serial.begin(9600); Serial.println("Lendo dados do sensor..."); } void frente()//Andar para frente { motor_esq.setSpeed(180); motor_dir.setSpeed(180); motor_esq.run(FORWARD); motor_dir.run(FORWARD); delay(1000); motor_esq.setSpeed(0); motor_dir.setSpeed(0); motor_esq.run(RELEASE); motor_dir.run(RELEASE); delay(300); } void re() //Andar de trás { motor_esq.setSpeed(180); motor_dir.setSpeed(180); motor_esq.run(BACKWARD); motor_dir.run(BACKWARD); motor.setSpeed(0); motor.setSpeed(0); motor_esq.run(RELEASE); motor_dir.run(RELEASE); } void direita()//Virar para a direita { motor_esq.setSpeed(180); motor_dir.setSpeed(0); motor_esq.run(FORWARD); motor_dir.run(FORWARD); delay(300); motor_esq.setSpeed(0); motor_dir.setSpeed(0); motor_esq.run(BACKWARD); motor_dir.run(BACKWARD); delay(300); } void esquerda() //Vira para a esquerda { motor_esq.setSpeed(0); motor_dir.setSpeed(180); motor_esq.run(FORWARD); motor_dir.run(FORWARD); delay(300); motor_esq.setSpeed(0); motor_dir.setSpeed(0); motor_esq.run(RELEASE); motor_dir.run(RELEASE); delay(300); } void direita90() //Vira para a direita em 90 graus { motor_esq.setSpeed(90); motor_dir.setSpeed(0); motor_esq.run(FORWARD); motor_dir.run(FORWARD); delay(300); motor_esq.setSpeed(0); motor_dir.setSpeed(0); motor_esq.run(FORWARD); motor_dir.run(FORWARD); delay(300); } void esquerda90() //Vira para a esquerda em 90 graus { motor_esq.setSpeed(0); motor_dir.setSpeed(90); motor_esq.run(FORWARD); motor_dir.run(FORWARD); delay(300); motor_esq.setSpeed(0); motor_dir.setSpeed(0); motor_esq.run(RELEASE); motor_dir.run(RELEASE); delay(300); } void giro() //Gira o robo em 180 graus { motor_esq.setSpeed(180); motor_dir.setSpeed(0); motor_esq.run(FORWARD); motor_dir.run(FORWARD); delay(300); motor_esq.setSpeed(0); motor_dir.setSpeed(0); motor_esq.run(RELEASE); motor_dir.run(RELEASE); delay(300); } void parar() { motor_esq.setSpeed(0); motor_dir.setSpeed(0); motor_esq.run(RELEASE); motor_dir.run(RELEASE); delay(300); } void loop() { /*Le as informações do sensor de distância float cm; long microsec = ultrasonic.timing(); cm = ultrasonic.convert(microsec, Ultrasonic::CM); Serial.print("Distancia em cm: "); Serial.print(cm); Serial.println(); delay(1000); */ //Movimentos }
-
Visual Basic VBA Com 'Range.Formula' para várias Celulas
Pablo Terra respondeu ao tópico de Pablo Terra em Programação - outros
@Basole Cara, sensacional, me deu o que eu precisava. Me ajuda só em uma última dúvida? Na planilha escrevemos =DIATRABALHOTOTAL.INTL(dtini;dtfin;1); mas em vba como ficaria? Estou usando o ActiveCell.Formula = "=NETWORKDAYS.INTL(LC[-3],NOW(),1) mas não vai adicionado 49 minutos depois @Basole já descobri o erro, o correto é ...(RC[-3]...) eu havia colocado LC -
Visual Basic VBA Com 'Range.Formula' para várias Celulas
Pablo Terra postou um tópico em Programação - outros
Prezados, preciso de ajuda. Estou realizando uma função em VBA que realiza a contagem de datas entre uma data até hoje, através da atribuição da fórmula a uma celula por VBA, consigo realizar isso para uma única range, conforme abaixo, mas e para mais de uma range, por exemplo, possuo mais de 1000 linhas, é desumano, fazer o código linha por linha. Range("H8").Select ActiveCell.Formula = "=NOW()-E8" Peço auxílio.


Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais