

wBB
-
Posts
100 -
Cadastrado em
-
Última visita
-
Bluetooth Low Energy no ESP32: Veja este vídeo:
-
Agora que você conseguiu jogar na porta serial o dados lidos no sensor, então você precisará transmitir esses dados para seu app/smartphone/PC. Existem algumas formas de fazer isso: 1) Via Bluetooth Low Energy (ou apenas BLE) que é um dos meios de comunicação com o ESP32 (este módulo não disponibiliza o Bluetooth Classic). Por esse meio você poderá estabelecer a comunicação direta entre o smartphone e o ESP32, sem equipamentos intermediários; 2) Via Wifi: por este meio de comunicação você pode estabelecer a conexão entre o smartphone e o ESP usando um roteador para intermediar essa conunicação, ou então, você pode configurar o ESP32 como Access Point, fazendo com que o smartphone se conecte ao ESP diretamente; 3) Via cabo: É possível comunicar-se com o ESP32 via cabo USB, que seria mais comum caso você quisesse criar um aplicativo que rode em PC, evitando assim a necessidade de comunicação sem fio. Dê uma pesquisada nestes três casos. É uma pesquisa meio longa, tem muito material, mas também tem muitos exemplos prontos. Considere que boa parte dos exemplos usados para ESP8266 (muito mais popular que o ESP32), servirá também para seu caso.
-
Foi como eu disse... Você tem que ir por partes e não é isso que você está nos mostrando em suas dúvidas. Em qual ambiente de desenvolvimento você está programando o ESP32? PlatformIO? Arduino? Usando C numa IDE como Eclipse? Usando Python? Você conseguiu fazer o ESP32 ler o valor que o sensor está disponibilizando? Se sim, onde você viu o valor? No monitor da serial do Arduino (supondo que você esteja usando Arduino)? O valor varia de quanto até quanto? Ajude a galera a te ajudar!
-
Arduino Problema na primeira vez que uso o esp32 na ide arduino
wBB respondeu ao tópico de Kauê Murakami em Microcontroladores
Já vi esse problema de comunicação ocorrer por alguns motivos: 1) Antivirus atrapalhando na compilação do programa e gerando timeout (McAfee no meu caso). Após desabilitar o antivirus, funcionou; 2) Driver com problema ou incorreto. Após reinstalar o driver tudo funcionou OK; 3) Se você estiver ligando o ESP32 (ou ESP8266 também) com alimentação externa e não apenas via USB, coloque um capacitor de uns 10uF entre o GND e o VIN. -
Você tem que informar por partes o que você quer. Pelo que pude ver, você não tem nenhuma parte pronta de seu projeto e não sabe por onde começar. Então sugiro você começar pelo que foi informado no título do tópico (e apenas o que está relacionado com o título do tópico). Qual é o seu real problema com ESP32?
-
Já resolvi. Era uma problema com o de driver que tinha sido comprometido ou instalado indevidamente em alguma das últimas atualizações do Windows 10. Obrigado.
-
1- Conectei APENAS um computador ao roteador via Wifi (certeza, apenas um computador e mais nada); 2- Conectei o roteador ao modem via cabo; 3- Abri alguns sites de teste de velocidade: http://www.brasilbandalarga.com.br https://www.minhaconexao.com.br/ http://velocidade.algartelecom.com.br/ https://fast.com/pt/ http://www.copeltelecom.com/site/speedtest/ etc.; 4- Executei o teste oferecido por cada um destes sites; 5- Repeti o processo com o celular (sim, certeza que agora só estava conectado ao roteador);
-
Os testes foram feitos sempre via wireless/wifi (pra falar a verdade meu notebook nem tem entrada ethernet e o celular não tem outra opção mesmo).
-
Pessoal, gostaria de descobrir o que (ou qual programa) está consumindo minha banda larga. A situação é a seguinte: tenho uma conexão de 15MB com um roteador e apenas um notebook com Windows 10 conectado a este roteador (não tem mais nada conectado, só um único notebook). Nos meus testes, quando verifiquei a velocidade de conexão usando apenas o notebook, a velocidade chegava a 7MB. Porém, se eu verificar a velocidade usando o celular (agora apenas o celular conectado ao roteador), aí consigo alcançar os 15MB esperados. Como faço para detectar no meu notebook o que está derrubando ou consumindo minha conexão?
-
Outro ESP8266 12E com RS485 enviando dados a mais
wBB respondeu ao tópico de wBB em Microcontroladores
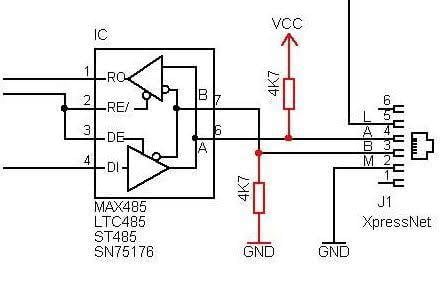
Felipe, obrigado pelas informações. O chip SN75176 que estou usando, diferente dessa da imagem de resposta (que obtive na resposta de outro usuário em outro site) nem precisa de resistores, ao menos para minha aplicação. Depois de verificar melhor e fazer outros testes percebi que era necessário apenas o capacitor de 100nF entre os terminais do chip RS485. Aliás, foi uma falha minha, pois no próprio datasheet do chip está a indicação desse capacitor. Obrigado -
Outro ESP8266 12E com RS485 enviando dados a mais
wBB respondeu ao tópico de wBB em Microcontroladores
Resolvido. Acrescentei resistores à saída do RS485 conforme a imagem anexa (apenas em uma das placas) e também coloquei um capacitor cerâmico de 100nF direto nos terminais do chip das duas placas. Créditos da resposta
-
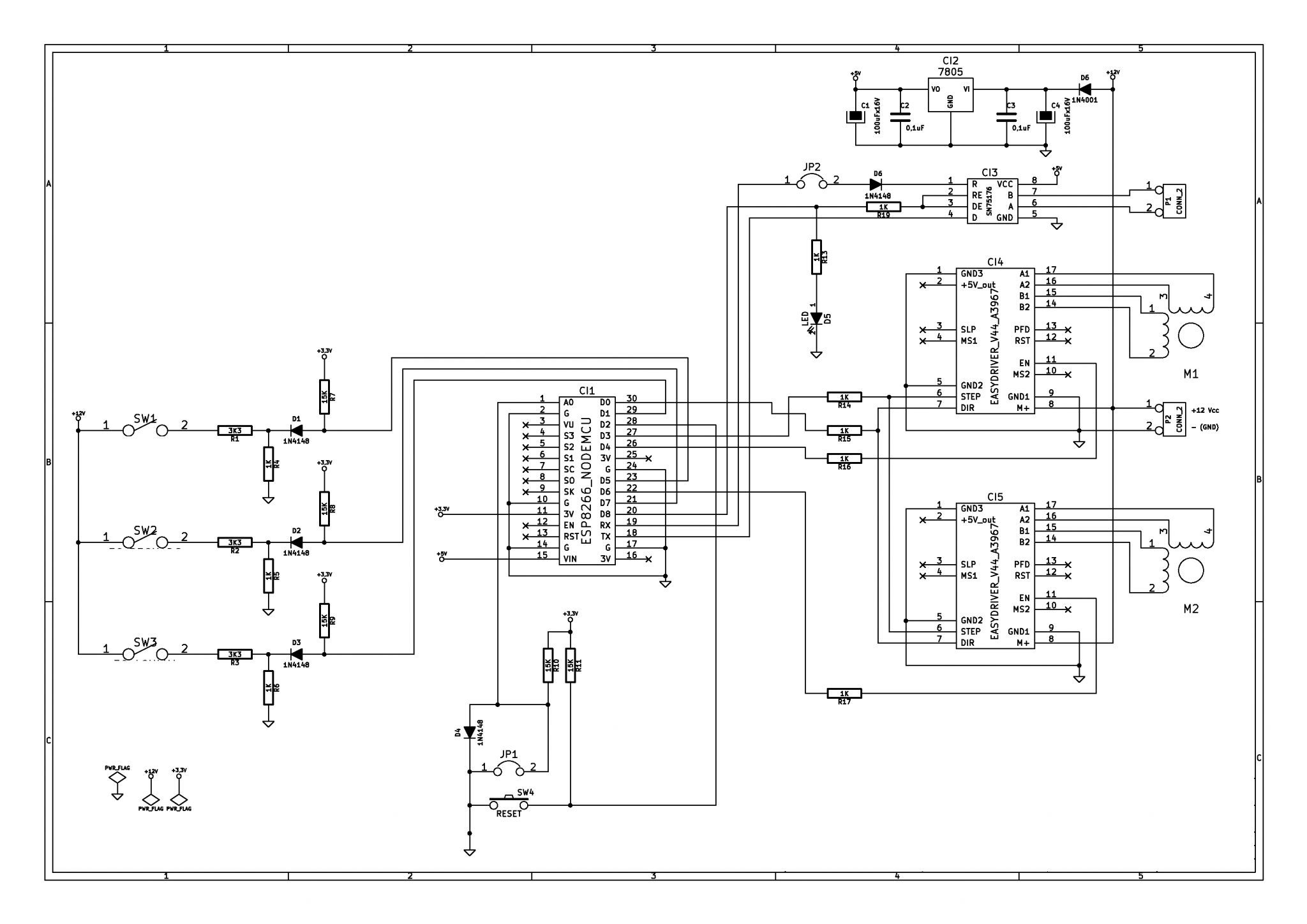
Pessoal, estou desenvolvendo um circuito usando NodeMCU ESP8266 12E com comunicação RS485. A comunicação RS232 está funcionando perfeitamente quando ligo um circuito ao outro (são duas placas iguais ao esquema eletrônico anexo), ou seja, tudo que é enviado de uma placa para outra é recebido corretamente (nos dois sentidos) ao conectar os RxTx das placas. Ao ligar a comunicação RS485 uso o pino D8 (GPIO15) do ESP8266 como bit de controle da transmissão de dados conforme indicado no esquema. PLATAFORMA ARDUÍNO. PROBLEMA: Ao colocar para funcionar a comunicação RS485 conforme indicado no esquema, a placa que envia os dados está transmitindo tudo corretamente. Porém, na placa receptora coloquei um debug para saber o que está recebendo e descobri que está vindo um caractere ZERO a mais no início do frame. Exemplo: Bytes ENVIADOS pela PLACA 1 no frame de teste: 0x21 0x06 0x00 0x0A 0x00 0x14 0xAE 0xA7 Bytes RECEBIDOS pela PLACA 2: 0x00 0x21 0x06 0x00 0x0A 0x00 0x14 0xAE 0xA7 IMPORANTE: Quando eu reinicio a placa receptora (PLACA 2 em meu exemplo), o frame recebido vem sempre correto. Do segundo em diante vem com esse caractere a mais no início. Alguém tem ideia do que pode ser?
-
Já resolvi. Implementei uma rotina simplificada do protocolo Modbus RTU, apenas com as funções necessárias. Seguem abaixo os dois arquivos do código do protocolo e um arquivo de exemplo com Arduino (funciona no ESP8266). //============================================================================== // ModbusRTU.cpp //============================================================================== /*------------------------------------------------------------------------------- COMUNICAÇÃO MODBUS RTU Descrição: Implementação parcial do protocolo de cominicação Modbus RTU. Funções implementadas: 1) Function 03 (03 hex): Read Holding Registers 2) Function 06 (06 hex): Write Single Register 3) Function 16 (10 hex): Write Multiple Registers REFERÊNCIAS: 1) http://www.modbustools.com/modbus.html 2) http://modbus.org/docs/Modbus_over_serial_line_V1_02.pdf -------------------------------------------------------------------------------*/ #include "modbusRTU.h" /*============================================================================== Function : CRC_16 Descrição : Executa o cálculo do CRC16 sobre os dados passados no parâmetro. Parâmetros: nData : Ponteiro para os dados sobre os quais o CRC16 será calculado; wLength: Quantidade de dados (em bytes) que serão processados no cálculo. Retorno : Valor do CRC calculado. =========================================================== ===================*/ unsigned int CRC_16(const unsigned char *nData, unsigned int wLength) { unsigned char nTemp; unsigned int wCRCWord = 0xFFFF; while (wLength--) { nTemp = *nData++ ^ wCRCWord; wCRCWord >>= 8; wCRCWord ^= wCRCTable[nTemp]; } return wCRCWord; } /*============================================================================== Function : ModbusRTU_Pack Descrição : Faz a interpretação de mensagens Modbus RTU recebidas e também o empacotamento de mensagens Modbus RTU. Parâmetros: MBBuff : Ponteiro para o array que representa o buffer original, proveniente da rotina chamadora; MBHoldingReg : Ponteiro para o array dos registradores Modbus. Retorno : >0 : SUCESSO = Tamanho da mensagem a ser transmitida via TCP/IP. =0 : Erro ou não há mensagem a ser processada como resposta. ==============================================================================*/ unsigned char ModbusRTU_Pack(unsigned char *MBBuff, unsigned int *MBHoldingReg) { unsigned int DataByteLength; unsigned int RegisterStart; unsigned int RegistersCount; unsigned int MessageLength; unsigned int CRC_Ref; unsigned char DeviceAddr; unsigned char MB_Function; // Seleciona os parâmetros da mensagem de Request DeviceAddr = MBBuff[MB_RTU_DEV_ADDR]; MB_Function = MBBuff[MB_RTU_FUNC]; RegisterStart = (MBBuff[MB_RTU_REGISTER_START] << 8) + MBBuff[MB_RTU_REGISTER_START +1]; RegistersCount = (MBBuff[MB_RTU_REGISTER_COUNT] << 8) + MBBuff[MB_RTU_REGISTER_COUNT +1]; // Os devices começam a partir do valor "1" if (DeviceAddr == 0) { return 0; } if (RegistersCount > MB_MAX_HOLDING_REGISTER) { return 0; } switch(MB_Function) { case MB_FC_NONE: MessageLength = 0; break; case MB_FC_READ_REGISTERS: // 03 Read Holding Registers // Verifica se é válido o CRC da mensagem de Request CRC_Ref = (MBBuff[MB_RTU_CRC +1] << 8) + MBBuff[MB_RTU_CRC]; if (CRC_Ref != CRC_16(MBBuff, 6)) { return 0; } // Empacota a resposta para o resquet corrente DataByteLength = RegistersCount * 2; MBBuff[MB_RTU_DEV_ADDR] = DeviceAddr; MBBuff[MB_RTU_FUNC] = MB_Function; MBBuff[MB_RTU_BYTE_COUNT] = DataByteLength; // Seta na resposta os valores atuais dos registradores for (int i = 0; i < RegistersCount; i++) { MBBuff[ MB_RTU_RESPONSE_DATA + i * 2] = (MBHoldingReg[RegisterStart + i] >> 8) & 0xFF; MBBuff[(MB_RTU_RESPONSE_DATA + 1) + i * 2] = MBHoldingReg[RegisterStart + i] & 0xFF; } // Calcula o CRC16 #define HEADER_DATA_READ 3 CRC_Ref = CRC_16(MBBuff, HEADER_DATA_READ + DataByteLength); // "3" = 3 bytes do cabeçalho MBBuff[HEADER_DATA_READ + DataByteLength] = CRC_Ref & 0xFF; MBBuff[HEADER_DATA_READ + DataByteLength +1] = (CRC_Ref >> 8) & 0xFF; MessageLength = HEADER_DATA_READ + DataByteLength + MB_RTU_CRC_LEN; break; case MB_FC_WRITE_REGISTER: // 06 Write Holding Register // Verifica se é válido o CRC da mensagem de Request CRC_Ref = (MBBuff[MB_RTU_CRC +1] << 8) + MBBuff[MB_RTU_CRC]; if (CRC_Ref != CRC_16(MBBuff, 6)) { return 0; } // Seta o registrador com o novo valor recebido no request MBHoldingReg[RegisterStart] = (MBBuff[MB_RTU_S_WRITE_DATA_START] << 8) + MBBuff[MB_RTU_S_WRITE_DATA_START +1]; // Resposta: a resposta é um "echo" do request, que tem sempre tamanho "8" MessageLength = 8; break; case MB_FC_WRITE_MULTIPLE_REGISTERS: // 16 Write Holding Registers // Verifica se é válido o CRC da mensagem de Request CRC_Ref = (MBBuff[MB_RTU_REGISTER_COUNT + 2 + 1 + RegistersCount * 2 + 1] << 8) + MBBuff[MB_RTU_REGISTER_COUNT + 2 + 1 + RegistersCount * 2]; if (CRC_Ref != CRC_16(MBBuff, MB_RTU_REGISTER_COUNT + 2 + 1 + RegistersCount * 2)) { return 0; } // Seta os registradores com os novos valores recebidos no request for (int i = 0; i < RegistersCount; i++) MBHoldingReg[RegisterStart + i] = (MBBuff[MB_RTU_M_WRITE_DATA_START + i * 2] << 8) + MBBuff[(MB_RTU_M_WRITE_DATA_START +1) + i * 2]; // Empacota a resposta para o resquet corrente MBBuff[MB_RTU_DEV_ADDR] = DeviceAddr; MBBuff[MB_RTU_FUNC] = MB_Function; MBBuff[MB_RTU_REGISTER_START] = (RegisterStart >> 8) & 0xFF; MBBuff[MB_RTU_REGISTER_START +1] = RegisterStart & 0xFF; MBBuff[MB_RTU_REGISTER_COUNT] = (RegistersCount >> 8) & 0xFF; MBBuff[MB_RTU_REGISTER_COUNT +1] = RegistersCount & 0xFF; // Calcula o CRC16 #define WRITE_ANS_LENGTH 6 CRC_Ref = CRC_16(MBBuff, WRITE_ANS_LENGTH); MBBuff[WRITE_ANS_LENGTH] = CRC_Ref & 0xFF; MBBuff[WRITE_ANS_LENGTH +1] = (CRC_Ref >> 8) & 0xFF; // O comprimento da resposta é sempre tamanho "8" MessageLength = 8; break; default: // Se nenhuma função Modbus tiver sido processada, então apenas retorna "0" // para indicar que não há nada para ser enviado via TCP/IP MessageLength = 0; break; } return MessageLength; } //============================================================================== // ModbusRTU.h //============================================================================== #ifndef DefModbus #define DefModbus //------------------------------------------------------------------------------ // FUNÇÕES RELACIONADAS AO PROTOCOLO MODBUS // Função de cálculo do CRC16 Modbus unsigned int CRC_16(const unsigned char *nData, unsigned int wLength); // Função de empacotamento de dados unsigned char ModbusRTU_Pack(unsigned char *MBBuff, unsigned int *MBHoldingReg); //------------------------------------------------------------------------------ // CONSTANTES DE COMUNICAÇÃO MODBUS #define MB_MAX_HOLDING_REGISTER 20 // maxHoldingRegister 20 #define MB_FC_NONE 0 #define MB_FC_READ_REGISTERS 3 //implemented #define MB_FC_WRITE_REGISTER 6 //implemented #define MB_FC_WRITE_MULTIPLE_REGISTERS 16 //implemented // MODBUS Error Codes #define MB_EC_NONE 0 #define MB_EC_ILLEGAL_FUNCTION 1 #define MB_EC_ILLEGAL_DATA_ADDRESS 2 #define MB_EC_ILLEGAL_DATA_VALUE 3 #define MB_EC_SLAVE_DEVICE_FAILURE 4 // MODBUS MBAP offsets // READ #define MB_RTU_DEV_ADDR 0 #define MB_RTU_FUNC 1 #define MB_RTU_REGISTER_START 2 #define MB_RTU_REGISTER_COUNT 4 #define MB_RTU_CRC 6 // WRITE SIMPLE #define MB_RTU_S_WRITE_DATA_START 4 // WRITE MULTIPLE #define MB_RTU_M_WRITE_DATA_START 7 #define MB_RTU_BYTE_COUNT 2 #define MB_RTU_RESPONSE_DATA 3 // MODBUS REF #define MB_RTU_CRC_LEN 2 //------------------------------------------------------------------------------ // TABELA CRC16 MODBUS static const unsigned int wCRCTable[] = { 0X0000, 0XC0C1, 0XC181, 0X0140, 0XC301, 0X03C0, 0X0280, 0XC241, 0XC601, 0X06C0, 0X0780, 0XC741, 0X0500, 0XC5C1, 0XC481, 0X0440, 0XCC01, 0X0CC0, 0X0D80, 0XCD41, 0X0F00, 0XCFC1, 0XCE81, 0X0E40, 0X0A00, 0XCAC1, 0XCB81, 0X0B40, 0XC901, 0X09C0, 0X0880, 0XC841, 0XD801, 0X18C0, 0X1980, 0XD941, 0X1B00, 0XDBC1, 0XDA81, 0X1A40, 0X1E00, 0XDEC1, 0XDF81, 0X1F40, 0XDD01, 0X1DC0, 0X1C80, 0XDC41, 0X1400, 0XD4C1, 0XD581, 0X1540, 0XD701, 0X17C0, 0X1680, 0XD641, 0XD201, 0X12C0, 0X1380, 0XD341, 0X1100, 0XD1C1, 0XD081, 0X1040, 0XF001, 0X30C0, 0X3180, 0XF141, 0X3300, 0XF3C1, 0XF281, 0X3240, 0X3600, 0XF6C1, 0XF781, 0X3740, 0XF501, 0X35C0, 0X3480, 0XF441, 0X3C00, 0XFCC1, 0XFD81, 0X3D40, 0XFF01, 0X3FC0, 0X3E80, 0XFE41, 0XFA01, 0X3AC0, 0X3B80, 0XFB41, 0X3900, 0XF9C1, 0XF881, 0X3840, 0X2800, 0XE8C1, 0XE981, 0X2940, 0XEB01, 0X2BC0, 0X2A80, 0XEA41, 0XEE01, 0X2EC0, 0X2F80, 0XEF41, 0X2D00, 0XEDC1, 0XEC81, 0X2C40, 0XE401, 0X24C0, 0X2580, 0XE541, 0X2700, 0XE7C1, 0XE681, 0X2640, 0X2200, 0XE2C1, 0XE381, 0X2340, 0XE101, 0X21C0, 0X2080, 0XE041, 0XA001, 0X60C0, 0X6180, 0XA141, 0X6300, 0XA3C1, 0XA281, 0X6240, 0X6600, 0XA6C1, 0XA781, 0X6740, 0XA501, 0X65C0, 0X6480, 0XA441, 0X6C00, 0XACC1, 0XAD81, 0X6D40, 0XAF01, 0X6FC0, 0X6E80, 0XAE41, 0XAA01, 0X6AC0, 0X6B80, 0XAB41, 0X6900, 0XA9C1, 0XA881, 0X6840, 0X7800, 0XB8C1, 0XB981, 0X7940, 0XBB01, 0X7BC0, 0X7A80, 0XBA41, 0XBE01, 0X7EC0, 0X7F80, 0XBF41, 0X7D00, 0XBDC1, 0XBC81, 0X7C40, 0XB401, 0X74C0, 0X7580, 0XB541, 0X7700, 0XB7C1, 0XB681, 0X7640, 0X7200, 0XB2C1, 0XB381, 0X7340, 0XB101, 0X71C0, 0X7080, 0XB041, 0X5000, 0X90C1, 0X9181, 0X5140, 0X9301, 0X53C0, 0X5280, 0X9241, 0X9601, 0X56C0, 0X5780, 0X9741, 0X5500, 0X95C1, 0X9481, 0X5440, 0X9C01, 0X5CC0, 0X5D80, 0X9D41, 0X5F00, 0X9FC1, 0X9E81, 0X5E40, 0X5A00, 0X9AC1, 0X9B81, 0X5B40, 0X9901, 0X59C0, 0X5880, 0X9841, 0X8801, 0X48C0, 0X4980, 0X8941, 0X4B00, 0X8BC1, 0X8A81, 0X4A40, 0X4E00, 0X8EC1, 0X8F81, 0X4F40, 0X8D01, 0X4DC0, 0X4C80, 0X8C41, 0X4400, 0X84C1, 0X8581, 0X4540, 0X8701, 0X47C0, 0X4680, 0X8641, 0X8201, 0X42C0, 0X4380, 0X8341, 0X4100, 0X81C1, 0X8081, 0X4040 }; #endif //============================================================================== // MB_RTU.ino //============================================================================== // EXEMPLO DE APLICAÇÃO DA FUNÇÃO MODBUS COM ARDUINO / ESP8266 #include "modbusRTU.h" // Buffer para comunicação serial via protocolo Modbus byte MBBuffer[260]; // Registradores Modbus unsigned int MBHoldingRegister[MB_MAX_HOLDING_REGISTER]; int i, MB_msg_length; void setup() { for (i = 0; i < MB_MAX_HOLDING_REGISTER; i++) MBHoldingRegister[i] = 0; Serial.begin(9600); Serial.println(""); Serial.println("Sistema Iniciado..."); } void loop() { int i = 0; while(Serial.available()){ MBBuffer[i] = Serial.read(); i++; } if (i > 0) { // Atualiza as informações nos registradores as informações recebidas na porta serial MB_msg_length = ModbusRTU_Pack(MBBuffer, MBHoldingRegister); if (MB_msg_length > 0){ // Devolve a resposta Modbus Serial.write((const uint8_t *)MBBuffer, MB_msg_length); Serial.flush(); } } }
-
Pessoal, estou precisando montar uma rede de comunicação Modbus RTU MASTER e também RTU SLAVE com ESP8266 12E (ou F, tanto faz), mas não consegui encontrar uma biblioteca que funcione bem. Tem várias páginas/blogs/vídeos fazendo referência às coisas da PDA Control ou a Trialcommand (que são a mesma biblioteca), mas não consegui fazer nenhuma funcionar bem. A única que ainda consegui fazer comunicar foi essa da PDA Control, mas mesmo assim ocorrem muitos erros de escrita e leitura, muitos timeouts, etc, mesmo setando a serial para trabalhar em 9600 em lugar de velocidades mais altas. Alguém conhece alguma biblioteca que funcione bem para ESP8266 ou alguma rotina de Modbus RTU que funcione (escrita em qualquer linguagem) e que eu possa usar para "traduzir" para a linguagem C usada no Arduino? Já tentei usar sem sucesso essas bibliotecas: https://github.com/Trialcommand/ESP8266-Modbus-RTU-Slave/tree/master/Modbus https://github.com/pkourany/ModBusMaster https://github.com/smarmengol/Modbus-Master-Slave-for-Arduino https://github.com/JhonControl/ESP8266_ModbusRTU_Master_V2 https://github.com/4-20ma/ModbusMaster
-
PIC Como gravar na EEPROM uma variável de 4 bytes, usando Pic 18F4520
wBB respondeu ao tópico de Fabio Munhoz em Microcontroladores
Experimente refazer seu código como nesse exemplo abaixo. Eu não tenho como testar direto numa EEPROM então testei no https://repl.it/ e funcionou bem. Não tem motivo para não funcionar numa situação real também. void escrever(unsigned long valor){ unsigned char my_byte = 0; // Você pode colocar esse código num loop "for" também my_byte = valor & 0xFF; valor = valor >> 8; printf("one = %x\n" , my_byte); my_byte = valor & 0xFF; valor = valor >> 8; printf("two = %x\n" , my_byte); my_byte = valor & 0xFF; valor = valor >> 8; printf("three = %x\n" , my_byte); my_byte = valor & 0xFF; valor = valor >> 8; printf("four = %x\n" , my_byte); } unsigned long ler(unsigned int addr) { unsigned long numero_memoria = 0; unsigned char memoria_corrente = 0; // Você pode colocar esse código num loop "for" também memoria_corrente = 0xFF; // byte mais significativo numero_memoria = memoria_corrente; memoria_corrente = 0xFE; numero_memoria = (numero_memoria << 8) | memoria_corrente; memoria_corrente = 0xFD; numero_memoria = (numero_memoria << 8) | memoria_corrente; memoria_corrente = 0xFC; // Byte menos significativo numero_memoria = (numero_memoria << 8) | memoria_corrente; return numero_memoria; } int main(void) { escrever(0xFFFEFDFC); printf("%x\n", ler(0)); }

Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais