

Sérgio Lembo
-
Posts
3.035 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Fabricantes
Livros
Cursos
Análises
Fórum
Tudo que Sérgio Lembo postou
-
Sobre a corrente do motor DC. Os 12A indicados é com ele girando com o torque máximo sendo exigido. Em stall (motor travado ou o momento inicial no qual está parado) a corrente vai facilmente a 3X ou mais a corrente nominal.
-

Sobre sinal de áudio, sensibilidade de amplificadores
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
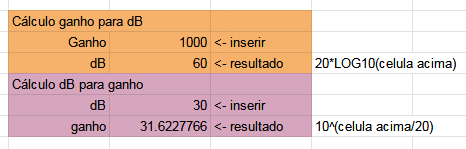
O conteúdo da célula resultado copiei ao lado.
-
Sobre sinal de áudio, sensibilidade de amplificadores
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
Realmente, para se ter uma sensação de som um pouco mais alto é necessário muito mais potência. Assim sendo se olha para a escala logarítmica para se ter a percepção do quanto o som será mais alto aos ouvidos e para a escala linear para se ver a potência necessária e se vale a pena. Sobre a distorção, uma coisa que observei nos datasheets é que a qualidade (baixo THD) vai bem até uns 80% da potência. Um conselho antigo entre os audiófilos é ter um conjunto sempre maior do que pretende usar para se estar sempre dentro da faixa de boa qualidade. -
Complementando a resposta do @Renato.88 , coloque em série com o diodo um pequeno resistor de fio de 2R7 em série com o diodo antiparalelo. Os bicos não fecham quando a tensão vai a zero, os bicos fecham quando a corrente zera. O resistor ajudará na queda desse tempo.
-
Sobre sinal de áudio, sensibilidade de amplificadores
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
Não sei o que considera pouco ou muito diferentes. dB é uma escala logarítmica. 27dB = 22,4 vezes 30dB = 31,6 vezes, quase 50% a mais. -
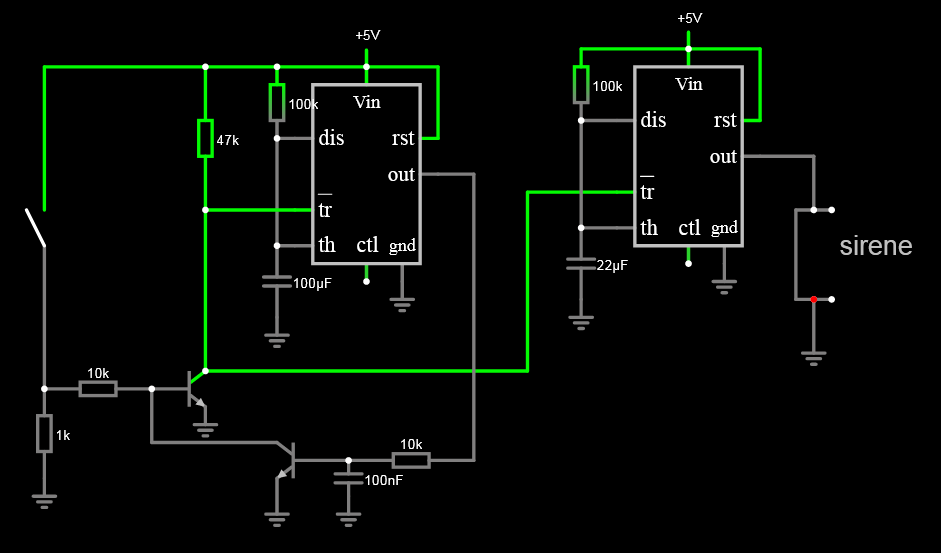
Caro @MOR_AL . O difícil estava em detectar o ring para transmitir à sirene remota. Pelo seu vídeo me parece que essa etapa foi vencida. Parabéns. Sobre a sirene tocar por um tempo excessivo, esta é a parte mais fácil de resolver. 2 timers, apenas isso. 1 para determinar o tempo de execução da sirene, independente da duração do ring e o outro para estabelecer um mute de repetição. No exemplo abaixo estabeleço uns 2s de execução da sirene e uns 10s de mute, isto é, recebido o ring a sirene será executada por 2s. Ao mesmo tempo corre o tempo de 10s que impede novo acionamento. Olhando para o desenho abaixo, da esquerda para a direita, a chave + resistor de 1K são a sua saída de RX fazendo o zero - um. Daí pra frente o circuito é válido. Ambos os timers em monoestável são disparados quando a entrada vai a um. O primeiro, calibrado para 10s, após um pequeno retardo, inibe novos disparos. O segundo executa a sirene por 2s. Um minúsculo PIC faz tudo isso de forma mais elegante, mas tem que programar. Dá na mesma.
-
Ajuste de fonte de bancada.
Sérgio Lembo respondeu ao tópico de Marcio Leandro B. Pizano em Eletrônica
@Marcio Leandro B. Pizano Muito cuidado com eletrólise. Havendo sais na água estes podem formar gases corrosivos e tóxicos. Só ligue o experimento em, locais ventilados. -
Indicação de empresas de placas eletrônicas no Brasil ou países próximos
Sérgio Lembo respondeu ao tópico de Juliana Almiria Sabino em Eletrônica
Use o google. clique aqui -
Controlar a velocidade de um motor DC 12 v 15A usando um sensor hall
Sérgio Lembo respondeu ao tópico de Paulo Ribeiro de Souza em Eletrônica
@albert_emule Grato pelo retorno. Notou que antes dos 40% de duty o motor sequer partia? O vídeo iria esclarecer melhor o que digo se houvesse uma imagem de corrente além da tensão. Na verdade, um simples resistor de baixo valor no negativo do motor e teríamos o segundo canal do scope mostrando a corrente. Na minha última aplicação de motor CC foi uma pequena esteira transportadora com motor de uns 800W, Campo de 127VAC retificados e Armadura para os mesmos 127VAC com ponte tiristorizada (ponte semicontrolada, nada de muito sofisticado). Pela simplicidade da necessidade usou-se um controle muito simples, muito semelhante ao dimmer de lâmpada. O resultado foi uma esteira que funcionava do zero a 100% e não a partir dos 40%. -
Controlar a velocidade de um motor DC 12 v 15A usando um sensor hall
Sérgio Lembo respondeu ao tópico de Paulo Ribeiro de Souza em Eletrônica
@albert_emule Sobre o ripple concordo contigo. A preocupação que externei é sobre a corrente não atingir o nível adequado para que o motor apresente o torque necessário. O interessante do motor CC paralelo (shunt) é apresentar o mesmo torque em toda a sua extensão de velocidade. No seu gráfico apresentado mostra uma condução CCM, que é o que se tem nos inversores AC de indução e nos amplificadores de som atuais classe D. Considero um pouco perigoso fazer analogia entre máquina AC e DC shunt porque na DC shunt se tem a FCEM na equação. Medir o torque disponível no eixo do motor é tarefa difícil. No caso da máquina DC shunt é fácil, basta medir a corrente. Para saber se o PWM está satisfatório uma fonte de bancada é o quanto basta. Se coloca uma carga no motor e se observa a resposta nas tensões de 20%, 40%, 75% e se compara com os resultados obtidos no mesmo duty do PWM. O debate está interessante, aguardo vosso retorno. Forte abraço. -
Controlar a velocidade de um motor DC 12 v 15A usando um sensor hall
Sérgio Lembo respondeu ao tópico de Paulo Ribeiro de Souza em Eletrônica
Grande Albert! Montou a receita do bolo. Sobre o PWM, não acha 5kHz uma frequência elevada para um motor de 60W? Não ficaria melhor algo entre 400Hz e 1kHz? Meu receio é que a máquina não alcance a corrente de trabalho em períodos tão curtos assim. Caso isso ocorra o usuário só irá achar torque quando o duty estiver em 100%. -
Controlar a velocidade de um motor DC 12 v 15A usando um sensor hall
Sérgio Lembo respondeu ao tópico de Paulo Ribeiro de Souza em Eletrônica
@Paulo Ribeiro de Souza , seu circuito esquentou e possivelmente torrou por ter sido construido de forma linear. Há quem use essa técnica para controle de baixas potências, sem problemas. Para potências maiores o indicado é o PWM. Para se fazer um controle PWM o que se faz é: - estabelecer uma base de tempo. Estamos falando da frequência do PWM. Em se tratando de motor a frequência não pode ser muito alta por conta da indutância do motor. Em altas frequências a indutância impede que o motor atinja a corrente necessária e o motor fica com o torque comprometido. Para motores de 1CV (750W) ou maior 120Hz é uma boa frequência. Para motores menores uma frequência maior é bom para diminuir o ronco do motor mas não se sobe demais a frequência por conta do torque. Essa base de tempo pode ser feita num gerador de rampa ou no timer de um microprocessador, é o mesmo princípio. - estabelecer um princípio de controle. Aqui definimos se o sinal do acelerador irá indicar a tensão a ser enviada ao motor ou a velocidade deste. A diferença é que ao indicar a tensão as ser enviada o sinal do acelerador vai direto para a comparação com o gerador de rampa ou para o compare do timer do microcontrolador, o resultado é o mesmo. Caso deseje o controle de velocidade terá que ter um sinal de retorno de velocidade, complica um pouco e não é o indicado para o uso proposto. Da comparação analógica ou digital já se tem o sinal de PWM, basta aplicá-lo ao transistor. Indo para o circuito: Foi selecionado por ti uma montagem de ímâ + transistor Hall para geração do sinal. Pelo que entendi dos posts conseguiste um sinal proporcional à posição do acelerador. Pouco importa se começa ou não do zero, tendo-se uma geração de sinal que reflita o desejo do condutor é o que importa. Um ponto importante é que o comportamento da sua montagem seja repetitivo independente de temperatura, solavancos do veículo ou qualquer outra coisa. Tem que ser confiável, há uma vida sobre o veículo. Com a geração de sinal resolvida, adaptar esta ao gerador de rampa ou ao timer do microprocessador é tarefa simples. A solução de se usar o 555 não é das melhores. -
Controlar a velocidade de um motor DC 12 v 15A usando um sensor hall
Sérgio Lembo respondeu ao tópico de Paulo Ribeiro de Souza em Eletrônica
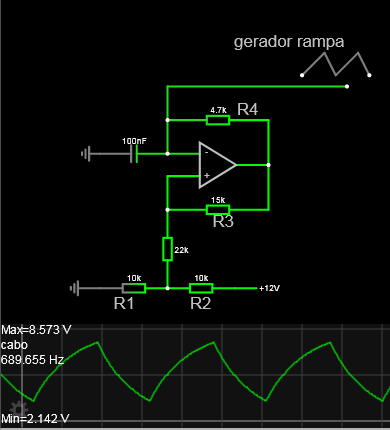
@Paulo Ribeiro de Souza , pelo que entendi no último post fizeste um circuito linear, controlando a velocidade pela excitação do gate. Em um motor de 15A não é uma boa ideia. Se conseguiste fazer um circuito que vai de uma tensão mínima a uma máxima como referência da velocidade desejada, para transformar isso num PWM é a coisa mais fácil. Abaixo temos o desenho de uma gerador de rampa: R1 e R2 fazem o centro da onda. R3 faz a amplitude pico a pico. R4 faz a frequência. Alimentação do operacional: 0V e 12V Na simulação foi admitida saturação negativa do operacional em zero Volt e positiva em 10V. Um PWM é quando comparamos uma rampa como a acima e a comparamos com o sinal de um potenciômetro ou, no seu caso, com o sinal de um hall. Com os valores acima se o sinal de entrada for inferior a 2.142V o duty é zero, acima disso vai subindo até alcançar 100% aos 8.573V. Estou com preguiça de fazer um desenho novo, vou aproveitar o abaixo. Pense no seu sensor hall como sendo o amplificador com detalhe em verde, daí para frente é o seu circuito. OBS: no segundo desenho o sinal de rampa parece sair do operacional. Na verdade é obtido no capacitor, na saída do operacional se tem uma onda quadrada, inútil ao propósito.
-
Controlar a velocidade de um motor DC 12 v 15A usando um sensor hall
Sérgio Lembo respondeu ao tópico de Paulo Ribeiro de Souza em Eletrônica
@Paulo Ribeiro de Souza Sem desejar ser ofensivo, sabe o que vem a ser um sensor hall? É um detector de magnetismo, apenas isso. O que deseja controlar no motor? Torque, velocidade? Se, no eixo do motor for colado um pequeno ímã e na estrutura próxima a este instalado um hall, cada vez que o ímã passar perto do hall terás um pulso. Pelo intervalo dos pulsos dá para se deduzir a rotação. No caso estaria funcionando como um encoder de um único pulso por revolução. Também é possível ler a corrente do motor pelo magnetismo da corrente sobre o condutor, uma tarefa complicada, requer calibração um a um, hall não é componente de precisão. Para melhor aproveitar a experiência dos frequentadores deste forum fale do objetivo antes de discutir o método. -
Construir antena caseira de TV usando varetas de solda 94% alumínio. Funciona?
Sérgio Lembo respondeu ao tópico de AlexMmf2 em Eletrônica
Como já disseram os amigos a corrente flui pela superfície nas altas frequências. Tanto faz se é oco ou sólido. No cálculo de antena o diâmetro altera o tamanho, quanto menor o diâmetro maior fica o comprimento para a mesma frequência. É um assunto cheio de detalhes, confesso que estudei isso apenas para passar de ano, este tema nunca me empolgou e os caminhos que segui (eletrônica industrial, aquisição de dados e acionamentos) não faz uso disso. Quem curte muito isso é o Paulo, vou provocá-lo. @aphawk -
Reatância capacitiva útil a LED em 220V
Sérgio Lembo respondeu ao tópico de alexandre.mbm em Eletrônica
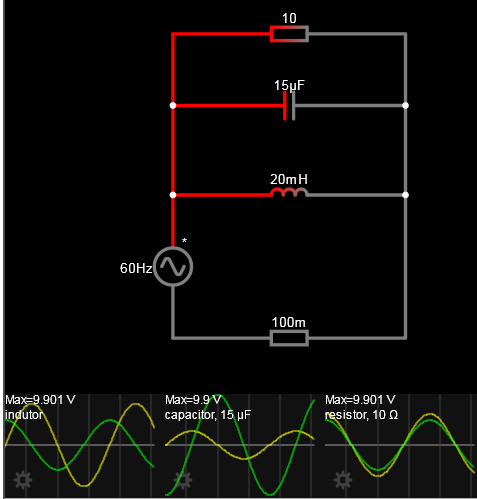
Note na imagem abaixo que temos uma carga resistiva, uma indutiva e uma capacitiva submetidas à mesma tensão. Nos gráficos abaixo a linha verde representa a tensão e a amarela a corrente. Note que na resistência a corrente está em fase com a tensão e no indutor e capacitor defasadas 90º em relação à tensão e 180º entre si. Por conta disso que fazemos soma vetorial.
-
Reatância capacitiva útil a LED em 220V
Sérgio Lembo respondeu ao tópico de alexandre.mbm em Eletrônica
Se usa Pitágoras por ser soma vetorial. Trata-se da defasagem de corrente de 90º em relação à tensão quando se usa capacitores em AC. Apenas isso. -
Sua premissa de que está sendo perdida energia está correta. Por essa razão não se usa fonte capacitiva onde há muito consumo. Se, a partir de 220V só se usa 22V e o resto fica no capacitor o rendimento é de 10%. Mesmo sendo um número baixo pode ser aceitável em circuitos de baixo consumo. Quanto ao fato de não aquecer, vai um estudo chato mas necessário de energia ativa e reativa. É da área de eletrotécnica, vi sobre isso nos bancos escolares (muito tempo atrás), esqueci dos detalhes.
-
Insisto que o seu caso tem características de mau contato. mau contato não é privilégio de instalações velhas. Possui um multiteste? Caso negativo, compre. Pode ser do simples e barato, para instalações elétricas não são necessários os caros. Disse que quando o ar condicionado liga a iluminação fica muito fraca. Meça a tensão da tomada antes e depois de ligar o ar condicionado e anote. Repita o teste, se possível na entrada de energia da loja, antes do relógio. Se o problema persistir no segundo teste reclame para a concessionária, peça para revisarem a ligação na rede do poste. Caso a queda não se repita no teste feito antes do relógio então o problema está na sua instalação. Quanto acreditar ou não na possibilidade de fios mal apertados, isso não é coisa na qual se faça apostas. Simplesmente se faz o reaperto para eliminar possibilidades, até porque é tarefa simples.
-
Como calcular KVA de aparelhos para gerador
Sérgio Lembo respondeu ao tópico de dvdsilva em Eletrônica
Estou vendo uma preocupação exagerada com a corrente de partida dos motores AC de indução. Primeiro precisamos entender que a diferença entre um transformador e um motor de indução está nos rolamentos. No instante em que se liga uma máquina estática ou girante (trafo ou motor) ainda não se tem o campo magnético estabelecido, por consequência não se tem a reatância e o que limita a corrente de partida é a resistência ôhmica da bobinas de cobre. Essa situação perdura por uns 100ms, após o que o próprio campo magnético passa a limitar a corrente. Nesse momento o gerador irá ter queda de tensão, inevitável. Vemos nas residências a luz cair um pouco quando ligamos o chuveiro. No caso do gerador isso não é problema, faz parte dos testes de homologação previstas em norma o funcionamento com curto circuito franco entre suas fases sem que o gerador queime. Vale a pena visitar o site da WEG para ler sobre o tema. Com o gerador estando acima do limite é certo que haverá um aumento do tempo que o motor leva para alcançar a rotação nominal mas nada que seja preocupante. Adquirir um gerador com base na corrente de partida me parece exagerado mas ter uma sobra prevendo o progresso natural da vida é sempre bom. No caso específico da geladeira trata-se de um compressor helicoidal, apresenta baixa carga em baixas rotações e leva alguns segundos até que se estabeleça pressão na saída, situação onde haverá maior exigência de torque do motor mas onde a rotação nominal já terá sido alcançada. Caro @Ricardov , fator de potência de 0.85 em motor pequeno nunca vi mas posso estar errado, vou de 0.80 para máquinas pequenas. -
Sinal sendo ceifado na saida de estagio push-pull para ganho de corrente.
Sérgio Lembo respondeu ao tópico de Everaldo Maciel em Eletrônica
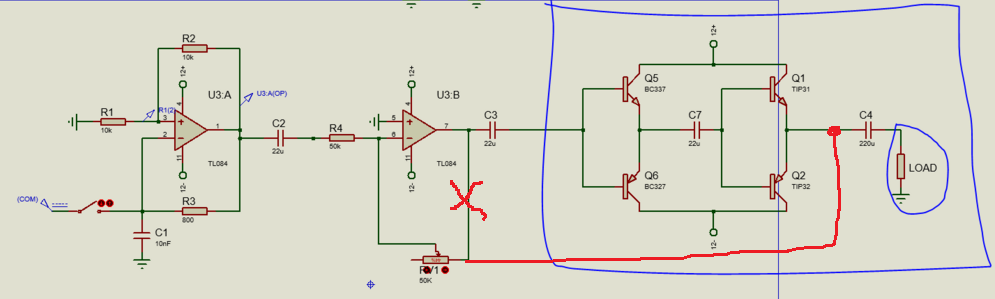
@Everaldo Maciel Não sei qual frequências está utilizando, com preguiça de fazer contas. Supondo que o operacional tenha o dv/dt necessário tenho que te lembrar que o segundo operacional está estabilizado em relação à saída deste. O que se deseja é o sinal desejado na cabeça da sua carga e entre a saída do operacional e a carga se tem capacitâncias parasitas dos componentes do push pull e outras porcarias. Faça a realimentação pela saída como ilustrado abaixo. A sugestão acima também resolve a questão do cross over entre -1.3V e +1.3V. Boa sorte. Nos mantenha informado.
-
Quando li seus primeiros posts meu pensamento foi de uma rede elétrica ruim, instável, por conta da distribuidora local. Com esse último comentário a origem problema passou da rua para seu estabelecimento. Se a rede está sentindo tanto assim um ar condicionado ou aparelho de som seu problema está na sua instalação. Pegue uma chave de fenda ou phillips e faça um reaperto de parafusos nos disjuntores do seu quadro de energia.
-
Sinal sendo ceifado na saida de estagio push-pull para ganho de corrente.
Sérgio Lembo respondeu ao tópico de Everaldo Maciel em Eletrônica
Sobre o primeiro amplificador: aquilo ficou um amplificador não inversor de ganho 2. O que faz R3? Quando a entrada está negativa a saída fica negativa em dobro, R3 tenta empurrar o sinal negativo da entrada mais para baixo ainda ou mais para cima quando a entrada está positiva. Qual a lógica disso? -
Sinal sendo ceifado na saida de estagio push-pull para ganho de corrente.
Sérgio Lembo respondeu ao tópico de Everaldo Maciel em Eletrônica
A que se destina isso? O sinal que entra vem de onde? O que é a entrada? Não entendi a profusão de tantos capacitores de desacoplamento. Se o sinal de entrada está sujeito a componente DC o desacoplamento da saída do primeiro amplificador é compreensível. Desse ponto em diante qual seria a origem do DC a ser desacoplado? Por exemplo: na saída final está desacoplando o quê se a fonte é simétrica e a carga está ligada no GND? No estágio de potência se escolheu o push pull com 2 estágios. Pela lógica do ganho de corrente é fácil de se entender, fica um push pull darlington mas o capacitor C7 limita a passagem de corrente entre os estágios. Sobre o cross over: o operacional Jfet que está usando é bem rápido. Se o trimpot que está usando para controlar o ganho buscar a realimentação na saída do push pull isso resolve o problema. Me ocorreu agora que se sua carga for sensível a danos por DC o capacitor colocado na saída se torna compreensível como elemento de proteção mas C3 e C7 permanecem um mistério para mim. -
Se um carregador tem 2A e eu quero carregar uma bateria descarregada de 1,2Ah.
Sérgio Lembo respondeu ao tópico de gabdudasantos em Eletrônica
Um estudante que não sabe fazer regra de 3 ou reconhecer os momentos em que esta deve ser aplicada?



Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais