

LeeoSiilva
-
Posts
14 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Fabricantes
Livros
Cursos
Análises
Fórum
Tudo que LeeoSiilva postou
-
Ahh sim, agora sim ficou extremamente claro. É que o medo de danificar algo e ter que comprar outro é grande kkkk Então você acredita que os 6v da bateria não vai me atender certo ? Vou tentar, se por um acaso não funcionar eu vou alimentar pela entrada jack mesmo com uma fonte de 9v 1a e ai deixo a bateria somente para os motores.
-
Como ficaria esse circuito ? eu iria colocar o positivo e o negativo da bateria no 4n25 e a saidas dele no Vin e no GND do arduino ? adicionado 7 minutos depois Eu não quero ter que usar baterias em paralelo pois quero usar apenas uma até por questões financeiras . Então o correto vai ser utilizar os gnd dessa forma ? porque ? adicionado 21 minutos depois Ah tá, entendi. como vou fazer em uma placa padrão utilizando barra de soquete header fêmea e barra de Pinos 40 vias 11,2mm coloco o positivo da bateria soldando nos 6 pinos que vou ter que usar e o negativo nos outros 6 e ai dos servos vou conectando em seus respectivos pinos. Obrigado, vou hoje comprar os componentes que faltam e colocar para funcionar!!!

-
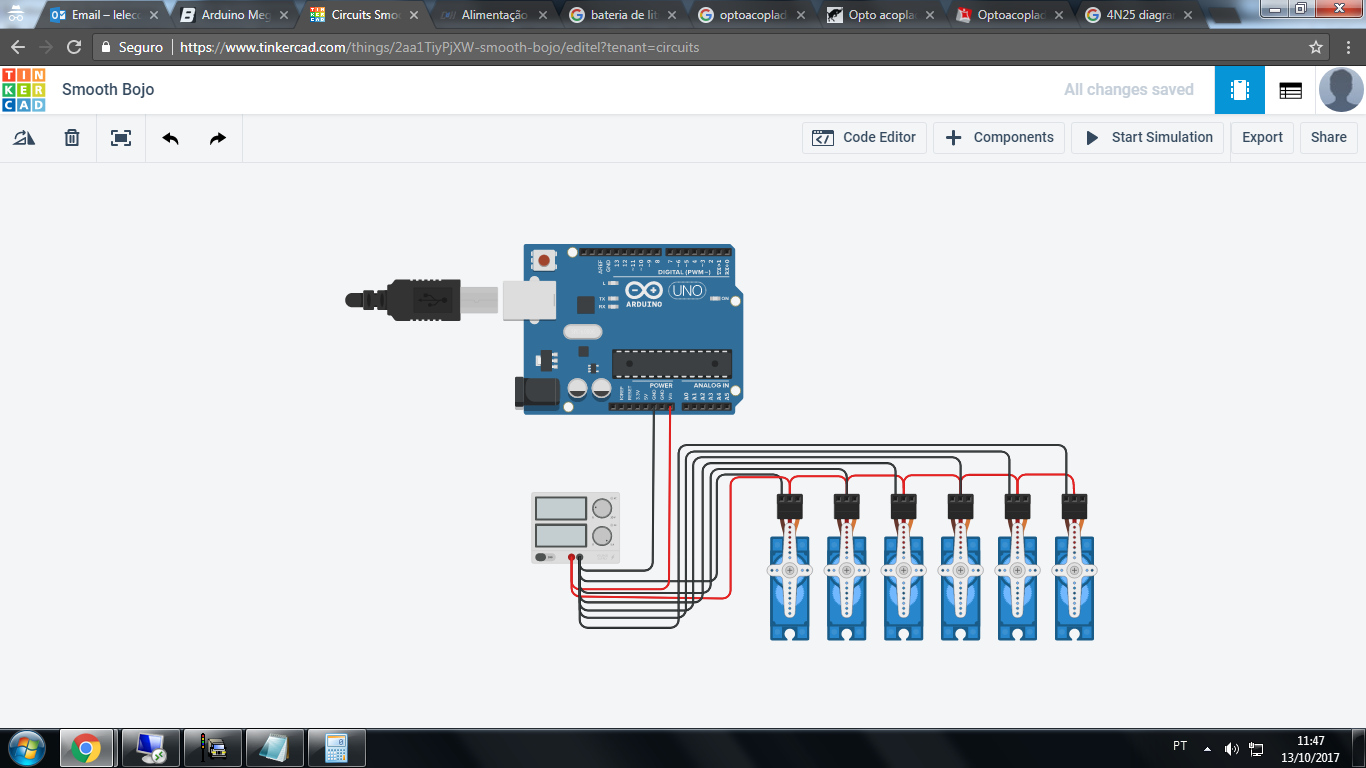
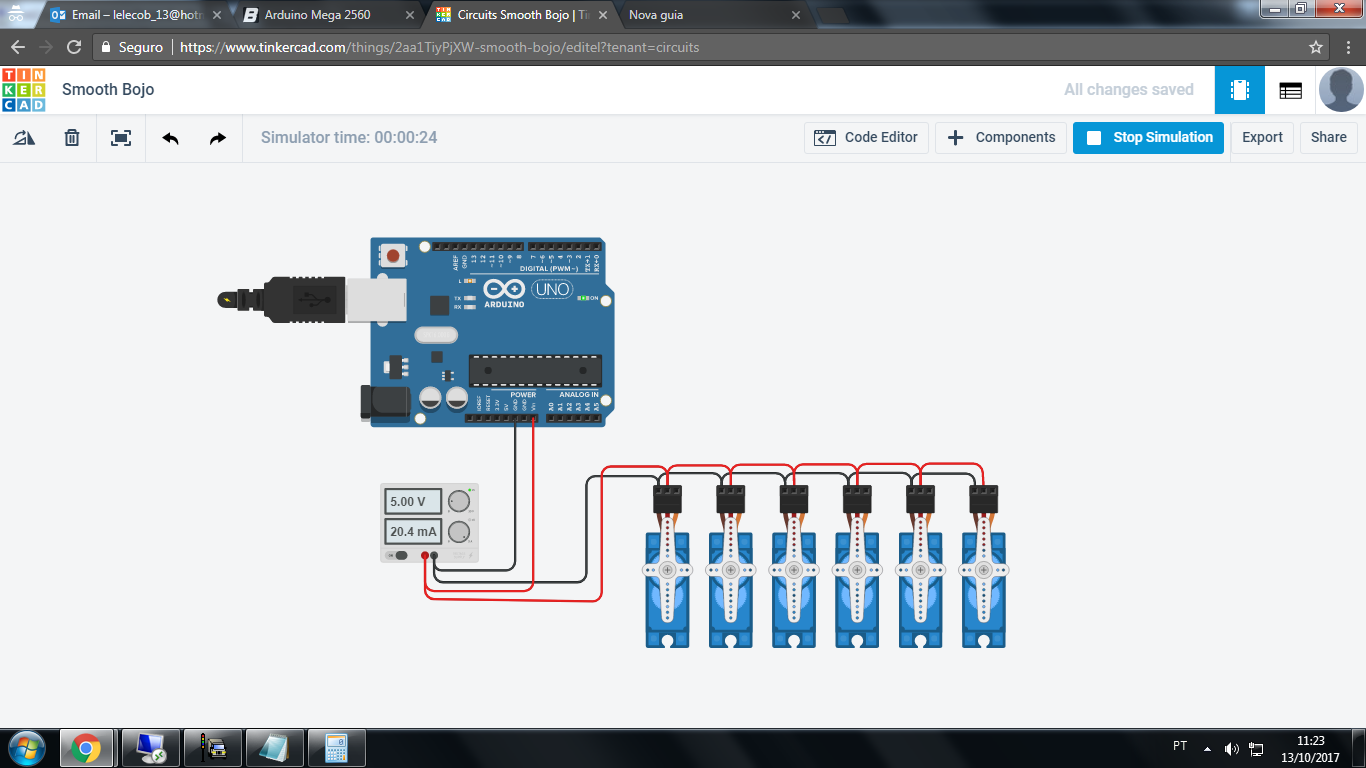
Então vai ficar assim, porém ali no lugar da "fonte" vai ser a bateria de 6v
-
Então problema resolvido, o arduino tem um regulador de tensão interno. Vou usar a bateria para alimentar os servos e o arduino, corro algum risco de passar os amperes que os servos vão consumir pelo arduino ? pois se isso acontecer eu danifico a placa. Com certeza irei ler Sergio, muito obrigado!!
-
A tensão de operação está entre 4.8~ 6.6v (a alguns fornecedores que dizem que a tensão de operação está entre 4,8 e 7,2) Então acredito que não vou ter problema algum com uma bateria de 6v, certo ? Perdoem a minha burrice, já li varias vezes e ainda não entendi qual a corrente maxima que uma bateria pode fornecer a um equipamento. Nas especificações dizem 4Ah, outras 12Ah, o que significa 4 ou 12 amperes hora até ele descarregar. Mas digamos que eu uso uma bateria 6v de 4Ah em um circuito que consome 8A, a minha bateria seria capaz de fornecer esses 8A (mesmo que por apenas 30minutos) afinal, qual a corrente maxima que uma bateria consegue fornece para um circuito ? voltando sobre a alimentação do arduino, no pino VIN eu li aqui que posso entrar com uma tensão maior que 5v que o regulador do proprio arduino converte para os 5v necessário. Nesse caso posso apenas utilizar a bateria para alimentar meus motores e o meu arduino, correto ? a algum risco de danificar meu arduino quando o motor puxar uns 3 ou 4A da minha bateria ?
-
Usando uma bateria de 6v direto logo não iria precisar fazer circuito nenhum, apenas direcionar o positivo e o negativos da bateria direto pros servo, certo ? nunca ouvir falar nesse dropout, como faço para saber se o meu arduino possui ? estou utilizando um mega 2560 compatível caso precise do 7805 para o arduino não teria problemas né ? uso a bateria alimentando direto os servo, e passando pelo 7805 que vou jogar direto nos pinos de alimentação do arduino, correto ?
-
Entendi, então vou ter um probleminha com a fonte ein, até porque quero 6v para que os servos tenha um rendimento melhor. Nossa, pior que tenho interesse nessa saladona em, rs Pois como falei, queria fazer um circuito 7806 para alimentar os servos, e se possivel já aproveitar para alimentar o arduino. Mas como sou leigo no arduino (não só nele...), só sei alimentar pela entrada p4 com uma fonte, ou pela entrada usb. Os pinos de alimentação do arduino fiquei em duvida, se posso jogar os 6v e o gnd da saida do circuito nos pinos 5v e gnd do arduino, ou se fazendo isso eu iria acabar queimando o arduino, ou podendo danificar devido a tensão. E também gostaria de saber de poderia danificar ele por saber que meus servos vão utilizar constantemente aproximadamente 3A, esses 3A passariam pelo arduino ? Eis que penso na possibilidade de fazer 2 circuitos na mesma placa, um 7805 para alimentar direto o arduino. e um 7806 com booster para uns 6A para alimentar os motores, tudo isso alimentado pela bateria de 12v. o que acha ? minha bateria: http://www.cirilocabos.com.br/bateria-selada-12v-70-seg/p (dá conta ?) To fazendo um braço robotico, tentando pelo menos kkkk então, é que o meu servo funciona melhor com 6v, com 5v ele fica muito fraquinho. De acordo o que eu falei, o que acha mais aconselhável eu tentar fazer ? Desculpe incomodar tanto assim, agradeço pela ajuda!!
-
@Isadora Ferraz Como sempre você me ajudando muito, quando esse projeto ficar pronto grande parte foi possível graças a sua ajuda. Porém eu que sou leigo fico um pouco perdido, por talvez não está sabendo entender as especificações Quando escolhi o MG995 fiz a escolha por apresentar as seguintes especificações: Especificações: – Modelo: TowerPro MG995 – Tensão de operação: 4,8-7,2V – Tipo de Engrenagem: Metálica – Modulação: Analógica – Velocidade de operação: 0,17seg/60graus (4,8V sem carga) – Velocidade de operação: 0,13seg/60graus (6,0V sem carga) – Torque: 13 kg.cm (4,8V) e 15 kg.cm (6,0V) – Faixa de Rotação: 180° – Tamanho cabo: 300mm – Dimensões: 40 x 19 x 43mm – Peso: 69g link: https://www.filipeflop.com/produto/servo-towerpro-mg995-metalico/ no entanto no datasheet eu acho as seguintes especificações: Specifications • Weight: 55 g • Dimension: 40.7 x 19.7 x 42.9 mm approx. • Stall torque: 8.5 kgf·cm (4.8 V ), 10 kgf·cm (6 V) • Operating speed: 0.2 s/60º (4.8 V), 0.16 s/60º (6 V) • Operating voltage: 4.8 V a 7.2 V • Dead band width: 5 µs • Stable and shock proof double ball bearing design • Temperature range: 0 ºC – 55 ºC link: http://www.electronicoscaldas.com/datasheet/MG995_Tower-Pro.pdf já em um outro site eu encontrei assim Specification: Weight: 55g Dimension: 40.7×19.7×42.9mm Stall torque: 9.4kg/cm (4.8v); 11kg/cm (6v) Operating speed: 0.20sec/60degree (4.8v); 0.16sec/60degree (6.0v) Operating voltage: 4.8~ 6.6v Gear Type: Metal gear Temperature range: 0- 55deg Dead band width: 1us servo wire length: 32cm Current draw at idle 10MA No load operating current draw 170MA Stall current draw 1200MA Servo Plug: JR (Fits JR and Futaba) servo arms &screws included and fit with Futaba servo arm It’s universal “S” type connector that fits most receivers, including Futaba, JR, Hitec ,GWS, Cirrus, Blue Bird, Blue Arrow, Corona, Berg, Spektrum. CE &RoHS approved We have upgraded our servo gear set and shaft to aluminum 6061-T6. It is stronger and lighter than copper. link: http://www.towerpro.com.tw/product/mg995/ esse que por sinal está dizendo até a corrente. (qual corrente devo considerar ?) Voltando sobre o assunto do gnd, se eu utilizar uma bateria para alimentar o circuito lm7806 e do pino gnd do arduino colocar junto ao gnd da placa, eu torno esse gnd comum para que meus servos funcione ? Estou um pouco confuso sobre o que seria melhor pra mim, alimentar o arduino com a mesma bateria que eu alimentaria os servos no circuito lm7806. Se uso uma fonte para alimentar o arduino e uma bateria para alimentar o circuito e os servos ou se uso 2 fontes, 1 pro arduino e outra pro circuito
-
Bom dia!!! Alguém poderia me dar uma ajuda ? Vamos lá!!! Tenho um Arduíno Mega, pretendo alimentar ele com uma fonte de 9v 1A. até então ok, mas ai começa o meu problema. Vou utilizar o arduino para fazer o controle de 6 servo motores, no entanto a alimentação desses motores tem que ser por um outro lugar para não queimar meu servo, certo ? Eis que pensei o seguinte, fazer um circuito com um regulador de tensão lm7806 em uma placa padrão. Mas fiquei com duvida sobre esse procedimento, se nesse caso eu iria precisar de uma outra fonte (aleatória que seja, de 12v ou 9v ou etc...) ou se teria como eu aproveitar a fonte de alimentação do arduino para alimentar o circuito. Outro ponto, para os servos funcionarem o GND tem que ser comum com o do arduino, caso eu utilize uma outra fonte ou até mesmo uma bateria para alimentar meu circuito, posso jogar o pino gnd do arduino ao gnd do circuito 7806 ? irei utilizar os servos MG995, alguém sabe me dizer o consumo de corrente dos servos ou como calculo ? Muito obrigado a atenção, um ótimo dia a todos!!
-
Entendi, no entanto esse peso seria do braço esticado com a peça na garra já (se ultrapassar esse peso não vai ser muita coisa) Então o que eu quero saber é mais ou menos o seguinte: Sabendo que o braço do motor esticado tem 80 cm e pesa 350g, com uma peça de 47g na ponta da garra, qual valor de torque necessário para levantar esse peso (350g + 47g = 397g) ? - Modelo: TowerPro MG995 - Tensão de operação: 4,8-7,2V - Tipo de Engrenagem: Metálica - Modulação: Analógica - Velocidade de operação: 0,17seg/60graus (4,8V sem carga) - Velocidade de operação: 0,13seg/60graus (6,0V sem carga) - Torque: 13 kg.cm (4,8V) e 15 kg.cm (6,0V) - Faixa de Rotação: 180° Não não, a rotação do motor é baixa e é controlado por um micro controlador Essas informações já me ajudaram bastante, estou começando a entender o caminho a seguir. Mas ainda não consigo enxerga como calcular o torque necessario para rotacionar o braço pra esquerda e direita, pois até o momento só comecei entender o torque necessário para ergue a carga (cima e baixo) , e pra leva pra direita e esquerda, o que devo considerar ?
-
Bom dia, obrigado pelas informações. já ajudou bastante... mas acho que com as informações que irei colocar vai ficar mais fácil ainda de vocês me ajudarem O motor da base não tem atrito algum, no caso a "chapa redonda" de baixo serve apenas para fixar o servo motor e a "chapa redonda" que fica acima esta fixada no eixo do servo. (e o servo está fixado na chapa de baixo) ou seja, imagine que ali na base a uma distancia de poucos milímetros entre cada uma das chapas, assim então sem atrito entre eles. Algumas informações do meu projeto: Meu braço vai ter o mesmo design do mostrado na foto. Vou utilizar mdf de 3mm para fazer as estruturas (penso em acrílico também, mas devido ser mais caro estou priorizando o mdf) ele vai ter um comprimento total de 800mm (cerca de 375mm cada articulação e 50mm a garra, ou números próximos a isso, mas o total dele vai ser de 800mm) Vou utilizar os servo mg995 que tem 15kgf/cm (já vi esse projeto rodar liso com esses servos, para fechar a garra vou usar um servo bem menor) Eu acredito que o peso total desse braço já com a carga que ele precisa ergue de algo em torno de 500g Então o que eu realmente preciso nesse momento é justificar a escolhas do motor por exemplo: os 2 motores da base tem 15kgf/cm somando os 2 tenho 30kgf/cm dividido pelo comprimento do braço seria 30/80 = 0,375 Estou errado ? se sim desculpe sou bem novato kkk mas caso eu esteja pelo menos no caminho certo eu só conseguiria justificar os motores que estão levantando o braço, agora preciso justificar o motor que rotaciona ele, o motor de base. E não estou sabendo fazer isso, alguém consegue me auxiliar ? ps: os cálculos não precisam ser extremamente completos, são algo simples ps²: esse projeto se trata de um tcm, se alguém tiver interesse em conhecer a fundo o que me foi solicitado e até mesmo está ajudando nesse processo basta me enviar um email: [email protected] adicionado 5 minutos depois @Sérgio Lembo @Moyano @Isadora Ferraz @Bommu Perneta Muito obrigado pelo apoios de vocês. Estou disposto a ouvir e a aprender.
-
Bom dia a todos Tenho pouco contato com o fórum, caso esteja criando o topico em lugar errado peço desculpa e se possível uma orientação de onde devo está criando. Enfim, espero que alguém consiga me ajudar, rs. Estou projetando um braço robótico, porém mal comecei e já achei uma serie de dificuldades... com um pouco de leitura e estudo estou conseguindo resolver boa parte deles, mas tem um deles que está tirando meu sono a dias já. Estou querendo desenvolver esse modelo: mas não estou conseguindo encontrar nada sobre calcular o motor 1 (o motor de base, que irá girar o braço para esquerda ou direita) será que alguém poderia me explicar de uma maneira simples como calcular os motores, principalmente o motor de base, os demais eu tenho um pouco menos de dificuldade. mas é sempre bom receber mais informações. Alguém me ajude adicionado 1 minuto depois Esqueci de citar, utilizarei servomotores
-
Agradeço muito pela ajuda @Isadora Ferraz e @MOR gostei muito das dicas. Com as informações que vocês me passaram eu acredito que o ideal no meu caso seria utilizar 2 laser xing ling e 2 til78 e sobre o problema de tempo para a esteira não disparar assim que haja qualquer movimento na frente dos lasers eu posso está utilizando 2 ci 555 (um pra cada sentido) correto ? Deixa eu acrescentar um problema para vê se estou "trilhando o caminho certo"... Para desligar a esteira é necessário que a peça chegue ao final da esteira, então também posso está usando 2 lasers e 2 til78 (um em cada extremidade da esteira) e quando eles forem bloqueados pela peça a esteira fique em stand-by novamente. apesar de ter uma pequena ideia de como fazer esse processo continuo bem leigo sobre o assunto e ainda com um pouco de dificuldade sobre como desenvolver esse circuito, podem me dar algumas dicas de como desenvolver isso ? ou algum lugar/livro que eu consiga ver algum conteúdo que me auxilie nessa montagem ?
-
Bom dia Srs. Sou um novato na área da eletrônica e ainda estou me deparando com algumas dificuldades, Gostaria da ajuda de vocês. Estou fazendo um projeto de uma esteira seletora, e gostaria de saber qual o sensor mais indicado para tal caso. Funciona da seguinte forma: A esteira fica em stand by enquanto até que uma peça seja depositada no centro da esteira, após essa ação o sensor deve identificar a altura da peça, caso a peça seja >5 cm a esteira liga para esquerda, caso a peça seja <5 cm a esteira liga para direita. Pretendo fazer isso utilizando uma ponte H com transistores (TBJ). ai em diante é onde entra as minhas duvidas sobre quais sensores utilizar. No momento estou pensando e querendo saber se há a possibilidade de utilizar 2 til32 e 2 til78, posicionados de maneira que 1 til32 e til78 fique um de frente com o outro (a distancia entre eles será de aproximadamente 15cm, é possivel utilizar eles?) e os outros til32 e til78 posicionado 5cm acima dos anteriores. Assim então quando colocado uma peça menor que 5 cm os sensores que estão abaixo serão "bloqueados" e ligando a esteira pro lado1 e quando colocado uma peça maior que 5cm os sensores de baixo e de cima seja "bloqueados" e ligando a esteira pro lado2. é possivel fazer dessa forma ? E caso seja possivel.... eu acho que vou me deparar com um erro. Quando eu for inserir a peça no centro provavelmente já vou "bloquear" algum dos sensores e já vai sair ligando a esteira, acredito eu que eu necessite de um tempo para primeiro colocar a peça e depois de pequeno tempo ela ter a ação de ligar, como posso está fazendo isso ? Peço desculpa se não consegui ser claro sobre a minha duvida, e se não consegui explicar bem o meu problema e também peço desculpas caso minha linha de pensamento esteja toda errada, eu realmente sou bem novato com isso. Mas desde já agradeço a atenção de todos vocês, um grande abraço.
Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais