

Pedro Treaquin
-
Posts
15 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que Pedro Treaquin postou
-
Estou desenvolvendo um projeto de robótica e nada mais é que a programação do PIC18F4550 (https://www.embarcados.com.br/proton-pic18f4550/) para alimentar as portas da ponte H em certos momentos. Não tenho muito conhecimento e experiencia nessa área, fiz o começo dessa programação para testes iniciais com os motores, compilou, mas não esta funcionando na pratica, a corrente não esta chegando na ponte H pelas portas que eu defini. Pode ser algo na programação? Programação.txt
-

PIC Como passar a programação do MPLAB para o PIC?
Pedro Treaquin respondeu ao tópico de Pedro Treaquin em Microcontroladores
A minha placa tem uma porta USB tipo B, com um PIC18F4550 como cabeça de tudo. A porta USB B é para passar o programa do computador para a placa. Mas não consigo achar um programa que mande o arquivo para a placa, a porta USB B é logo para substituir o uso de um pickit. @Isadora Ferraz adicionado 33 minutos depois @Isadora Ferraz minha placa é como está https://www.embarcados.com.br/μstart-for-pic-placa-de-desenvolvimento-para-pic/ só que mais moderna. E o que eu preciso é de um bootloader, o que tem no site está off, e não acho nenhum que funcione... -
PIC Como passar a programação do MPLAB para o PIC?
Pedro Treaquin postou um tópico em Microcontroladores
Estou programando no MPLAB e quero passar pra placa que esta meu PIC, ela tem porta USB B, qual software posso usar para passar do MPLAB para o PIC? -
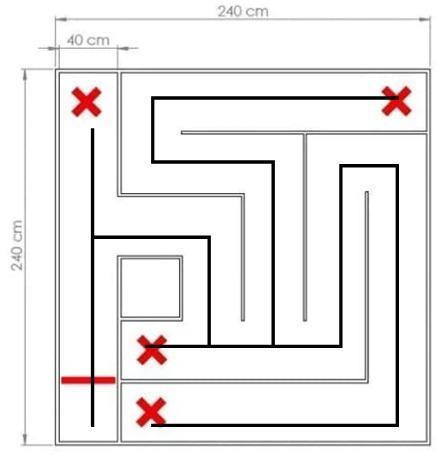
PIC Percorrendo labirinto com Robô
Pedro Treaquin respondeu ao tópico de Pedro Treaquin em Microcontroladores
SIm, o labirinto é conhecido e os X nunca mudam, irei fazer por pulso até o momento com a sequencia de comandos mesmos, apenas o PIC e um contador na parte eletronica e uma ponte H para os motores com as rodas. Sobre o robô virar no lugar certo vai ser na programação mesmo, vou ir mudando o código em pequenas distancias ate ele virar em todos os pontos certos. Algumas dezenas de testes e acho que consigo tranquilo. @aphawk -
Preciso achar uma forma de um robô (com PIC de preferência) percorra esse labirinto de forma que não haja controle externos. E estou aceitando sugestões de qual seria a melhor forma. Ele tem que percorrer o labirinto e passar por cada um dos X e voltar pra linha de partida. A principio pensei em linguagem LOGO ou até grafos. (ignorem a linha mais escura que percorre o meio do labirinto)

-
PIC Aprender mais sobre programação PIC
Pedro Treaquin respondeu ao tópico de Pedro Treaquin em Microcontroladores
@allanmarum Obrigado, estou trabalhando com esse PIC em questão mesmo sabendo que é meio antigo, porque eu não preciso de algo tão avançado atualmente, conforme os projetos venham a ser mais complexos eu vou me aprofundando mais. adicionado 3 minutos depois @aphawk A maior parte dos projetos que chega pra mim é de robôs ou carrinhos com motores DC e com um PIC para controlar tudo, quase sempre são bem basicos, então eu queria aprender mais sobre PIC principalmente na parte de controlar de varias formas motores DC. Não tenho um projeto especifico, apenas queria aprender mais sobre. -
Sou iniciante com PIC, e gostaria de aprender mais sobre a programação deles, principalmente se tiver relação com motores DC. (Estrou trabalhando especificamente com o PIC16F877A). Já dei umas pesquisadas mas não achei muita coisa sobre o assunto, se alguém tiver sites ou documentos sobre isso e puder passar seria de boa ajuda.
-
Obrigado @aphawk
-
então o robô tem que percorrer o labirinto e passar por todos os X que estão em vários pontos diferentes, não dá para usar nenhum sensor já que nenhum teria um bom uso, o que me ajudaria mais seria um ultrassônico, mas analisando bem ele ia mais me atrapalhar do que ajudar. Estou com uma base aonde tem dois motores DC com rodas, uma ponte H em cima para os motores DC e a bateria estou vendo uma que consiga alimentar os motores DC, provavelmente será uma bateria recarregável, e o CI posso optar por adaptar um protoboard para ele ou até usar uma plaquinha 10x10 mesmo . O robô durante o percurso não pode usar nenhum tipo de material externo para se guiar como trilhas ou luz, então tem que ser na base da programação mesmo, aonde com um botão vou iniciar o sistema do carrinho e o CI vai mandar os controles pro motor DC e assim que acabar o ciclo ele para. E minha duvida é qual seria o melhor CI para apenas controlar a velocidade dos motores depois que eu apertão o botão para dar inicio.@aphawk adicionado 9 minutos depois E para controlar os motores pensei em um controle PWM, o problema é que nunca fiz nada parecido antes, de programar apenas um CI para ele ter que trabalhar sozinho sem auxilio de nada, sempre lidei mais com Arduíno e quando precisei utilizar um PIC eu tinha vários componente de auxilio como sensores ultrassônicos. Em uma programação por blocos eu usaria rotações para ser bem preciso, em Arduíno seria algo parecido, mas com PIC tendo que fazer os dois motores funcionarem juntos até determinado ponto, depois fazerem juntos o sentido contrario até metade do percurso e fazer com que o motor DC esquerdo funcione sozinho para girar o robô em 90 graus... Estou um pouco perdido ainda.
-
Estou com um projeto aonde tenho que programar um robô para ele percorrer um labirinto. Aonde tenho que apenas programar dois motores DC para controlar o robô por todo labirinto, vai ser por rotação e graus mesmo, algo simples. Mas não sei qual seria o PIC mais adequado para esse simples projeto de controlar dois motores DC. Help
-
Obrigado pelas dicas @Rafael.R , mas pra esse projeto acabei desistindo do eagle, fui aconselhado usar o proteus nesse. Vou ter que passar para Gcode quando finalizar e isso é mais fácil no proteus tambem. No final das contas to tendo um trabalhão.
-
@Rafael.R tenho um problema, o CI que você falou pra mim usar, é mais fino que o meu em questão. É uma diferença bem consideravel. Vou disponibilizar uma imagem do meu esquema... imagem.docx
-
valeu muito Rafael, estava algumas horas já procurando esse PIC e nada, salvou meu dia. Já da pra fazer a placa de circuito impresso e colocar meu PIC no lugar desse que você me passou.
-
9 anos depois e to ressuscitando esse tópico!! Desculpem, mas to com uma duvida sobre bibliotecas do Eagle tambem. No meu caso é atras do PIC16F877A, não acho em lugar nenhum, se souberem de algum equivalente só para colocar na placa pra fazer o circuito impresso também está ótimo...
-
tenho que fazer um projeto aonde preciso de uma placa de circuito impresso a partir dessa imagem, estou fazendo no eagle, mas me deparei com um problema, o CI que preciso é um PIC16F877A e não tem, alguem sabe o que eu posso fazer? Eu poderia fazer um mas eu não sei criar... imagem.docx

Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais