

Boladoloko
-
Posts
22 -
Cadastrado em
-
Última visita
-
eae glr comprei a 2 dias o FFXV que tinha o sonho de ter desde o lançamento porém logo apos as primeiras cutscenes com o rei la e o nocts na tela de loading apresenta problemas alguem teria como me ajudar com algum FIX ? qualquer coisa pra fazer esse bendito game rodar nn achei nada no YT da gringa que de certo!!! as configs do meu PC são essas que estão no perfil era pra rodar de boa porém nada... o erro que apresenta esta logo na imagem ai.

-
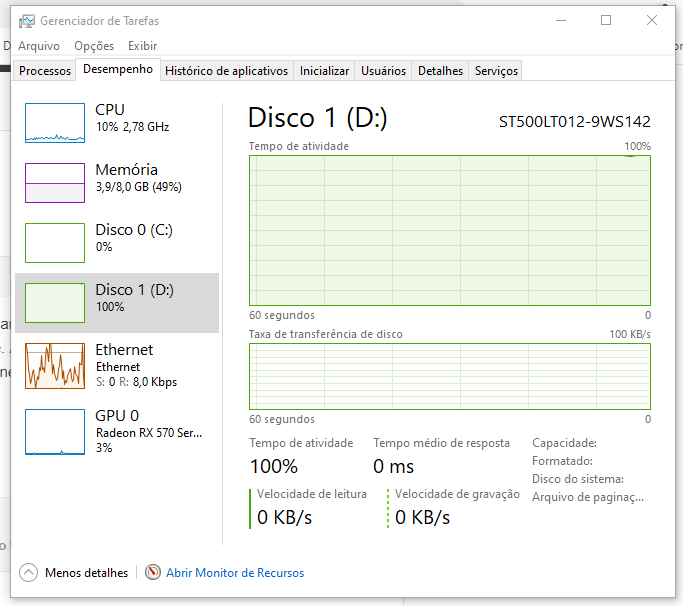
@mick 07 baixei o WD Data Lifeguard antes de formatar e tentei testar porém nn consegui, como ele ta em 100% de uso não carrega nada, ai agr fui no CMD e dei um CHKDSK e ta dizendo que ta no formato RAW vou tentar converter pra NTFS e ver como proceder mano...
-
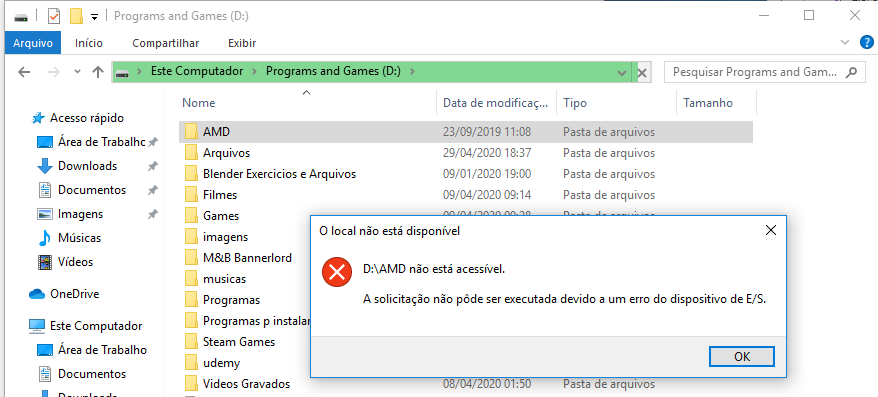
Eae glr, tenho um HD do meu antigo notebook montei um PC de entrada com ssd uns meses atrás e coloquei esse HD pra colocar arquivos alguns jogos etc. Aí esses dias ele vem parando de reconhecer quando início o PC e quando reconhece ele fica em fullload (100% de uso) quando faco qualquer ação nele. Alguém com alguma solução pra me ajudar? Pelo menos pra tentar recuperar os arquivos que estão nele? (Ah é quando ele para de reconhecer tenho que desconectar o sata e reconectar para ele poder reconhecer again, já testei em todas as entradas e troquei os satas porém mesmo jeito). já tentei vários métodos e até agr nada!!! me deem uma luz kkk Edit1: Formatei o PC e o erro continua no HD secundário e tá dando erro de E/S quando vou acessar alguma pasta.
-
Eae glr, tenho um HD do meu antigo notebook montei um PC de entrada com ssd uns meses atrás e coloquei esse HD pra colocar arquivos alguns jogos etc. Aí esses dias ele vem parando de reconhecer quando início o PC e quando reconhece ele fica em full load (100% de uso) quando faco qualquer ação nele. Alguém com alguma solução pra me ajudar? Pelo menos pra tentar recuperar os arquivos que estão nele? (Ah é quando ele para de reconhecer tenho que desconectar o sata e reconectar para ele poder reconhecer again, já testei em todas as entradas e troquei os satas porém mesmo jeito).
-
olá recentemente tive problemas com minha fonte (de pessima qualidade), que quando a GPU pedia um pouco mais de energia desligava o pc, entao um amigo me deu a solucao de limitar a tensão pelo MSI afterburner innt vim perguntar se é seguro ou não pode causar algum dano a minha GPU ou outro componente... testei em alguns jogos que ela não passava nem 1 min com eles abertos. especificações: SO: W10 HDD: SSD crucial 240GB e HD 500GB Chipset: AMD R3 2200G placa-mãe: Biostar A320MH Memoria: Ballistix (2x4GB) 2666Mhz Placa de video: AMD radeon RX570 4gb Fonte: ATX 550W BRX B-S550W bivolt (esse maldita fonte)
-
PC Desligando em Games
Boladoloko respondeu ao tópico de Boladoloko em Computador desligando sozinho
@Elder Nauvirth Bom, obrigado pela informação e gostaria de perguntar também se recomenda algum software que faça monitoramento enquanto uso e dps passe um relatório ? faz ideia de algum ? -
PC Desligando em Games
Boladoloko respondeu ao tópico de Boladoloko em Computador desligando sozinho
@Elder Nauvirth vish!!! obrigado pela indicação já dei uma olhada nela aqui, já vai pra lista de compras... mas no caso é ela que não esta suportando o hardware? -
PC Desligando em Games
Boladoloko respondeu ao tópico de Boladoloko em Computador desligando sozinho
@Elder Nauvirth péssima tenho noção disso kk, mas foi a unica que deu pra comprar no momento em dezembro irei troca-la -
olá pessoal, recentemente comprei um PC "Gamer", mas em alguns games que rodo ele desliga algumas vezes, recentemente acontece muito isso enquanto jogo warframe... e apaga de uma hora pra outra, só consigo religar-lo quando desligo na chave on/off da fonte e já estou preocupado pois né, gastei uma boa graninha nele vcs sabem bem que dinheiro ta difícil de conseguir, e pra nos trabalhadores é um money valioso, pfv me deem uma luz. algum teste de stress? ou algo pra descobrir o problema !!! especificações: SO: W10 HDD: SSD crucial 240GB e HD 500GB Chipset: AMD R3 2200G placa-mãe: Biostar A320MH Memoria: Ballistix (2x4GB) 2666Mhz Placa de video: AMD radeon RX570 4gb Fonte: ATX 550W BRX B-S550W bivolt
-
C {iniciante} Como, e onde usar "millis()" nesse programa
Boladoloko respondeu ao tópico de Boladoloko em C/C#/C++
@Boladoloko olha só não funcionou o monitor serial que tu colocou mas o resto perfeitamente obrigado mano. -
C {iniciante} Como, e onde usar "millis()" nesse programa
Boladoloko respondeu ao tópico de Boladoloko em C/C#/C++
@Mateus2 obrigado vou testar e ver se funciona -
olá alguém pode me dizer 'como, quando e onde' usar a função "millis" nesse programa ? criei esse programa e descobri que o "delay" esta deixando meu programa com mal funcionamento (esta atrapalhando o giro do meu motor de passo), e como sou iniciante não sei usar o "millis", por favor ajudem esse jovem aprendiz. Necessito de ajuda rápido . programa: /*livrarias usadas*/ #include "DHT.h" /*pinos usados sensores*/ #define pinSensorA0 A0 #define pinSensorChuva A1 #define DHTPIN A3 #define ldr_pin_sensor_light A4 /*pinos usados Atuadores*/ #define pinSolenoide 4 #define COOLER 3 #define pinMotor 5 /*PINOS FIM DE CURSO */ #define sunroof_open_switch 11 #define sunroof_closed_switch 12 /*Declaração do Dht e do tipo*/ #define DHTTYPE DHT11 DHT dht(DHTPIN, DHTTYPE); /*Variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; /*direção do giro*/ int direcao = 1; // Volta completa pra formar 1 giro // Ajuste de acordo com o seu motor int passos_motor = 700; int sunroof_open_switch_value; int sunroof_closed_switch_value; void setup() { pinMode(COOLER, OUTPUT); pinMode(pinSolenoide, OUTPUT); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); Serial.begin(9600); dht.begin(); } void loop() { /*declaraçao de variavel*/ float t = dht.readTemperature(); float ht = analogRead(pinSensorA0); /*monitoramento Serial*/ Serial.println(" "); Serial.print("TempDHT: "); Serial.print(t); Serial.println(" *C"); Serial.print(" Atuador1:"); Serial.println(" "); Serial.print(ht); Serial.print(" umidade:"); Serial.print(" "); delay(500);// delay de 1 seg para atualizaçao de dados /*Monitoramento da´parte do motor e sensores do motor*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" sensor chegada: "); Serial.print(analogRead(ldr_pin_sensor_light)); Serial.print(" "); Serial.print(" Atuador:"); Serial.println(" "); /*Controle do teto*/ void Controle_teto(); if (analogRead(ldr_pin_sensor_light) >= 500 || analogRead(pinSensorChuva) > 700) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); millis(1000); digitalWrite(pino_passo, 0); millis(1000); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); millis(1000); digitalWrite(pino_passo, 0); millis(1000); } /*configuração do cooler*/ void controle_Atuadores(); if (t >= 25.00) { Serial.println("Cooler ON"); digitalWrite(COOLER, LOW); } else { (t <= 24.00); Serial.println("Cooler OFF"); digitalWrite(COOLER, HIGH); } /*configuração da solenoide*/ if (ht > 600) { Serial.println ("Aberta solenoide"); digitalWrite (pinSolenoide, HIGH); } else { Serial.println ("Fechadao solenoide"); digitalWrite (pinSolenoide, LOW); } } } }
-
C Programa com delay ao ler varias funções e atrapalhando funcionamento
Boladoloko postou um tópico em C/C#/C++
olá montei esse programa pra uma estufa automática com as funções: controle de temperatura, controle de umidade da terra e teto solar (que abre de acordo se esta dia ou noite, com suporte um sensor de chuva para caso chova ele feche e quando pare abra) . Eu montei cada programa num arquivo separado para não me confundir, organizei os programas em um só porém em funções "void();" e vi que quando fazia ações no teto solar o motor estava com um tipo de delay que rodava e parava e continuava nesse loop até chegar no fim de curso, não sei o que pode ter causado isso, pois quando testei o código do motor separado o próprio funcionou perfeitamente, já chequei se havia interferência nos cabos, tensão ou até no próprio motor mas nada havia. gostaria que vocês me ajudassem com esse problema programa abaixo: /*livrarias usadas*/ #include "DHT.h" /*pinos usados sensores*/ #define pinSensorA0 A0 #define pinSensorChuva A1 #define DHTPIN A3 #define ldr_pin_sensor_light A4 /*pinos usados Atuadores*/ #define pinSolenoide 4 #define COOLER 3 #define pinMotor 5 /*PINOS FIM DE CURSO */ #define sunroof_open_switch 11 #define sunroof_closed_switch 12 /*Declaração do Dht e do tipo*/ #define DHTTYPE DHT11 DHT dht(DHTPIN, DHTTYPE); /*Variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; /*direção do giro*/ int direcao = 1; // Volta completa pra formar 1 giro // Ajuste de acordo com o seu motor int passos_motor = 370; int sunroof_open_switch_value; int sunroof_closed_switch_value; void setup() { pinMode(COOLER, OUTPUT); pinMode(pinSolenoide, OUTPUT); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); Serial.begin(9600); dht.begin(); } void loop() { /*declaraçao de variavel*/ float t = dht.readTemperature(); float ht = analogRead(pinSensorA0); /*monitoramento Serial*/ Serial.println(" "); Serial.print("TempDHT: "); Serial.print(t); Serial.println(" *C"); Serial.print(" Atuador1:"); Serial.println(" "); Serial.print(ht); Serial.print(" umidade:"); Serial.print(" "); delay(500);// delay de 1 seg para atualizaçao de dados /*Monitoramento da´parte do motor e sensores do motor*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" sensor chegada: "); Serial.print(analogRead(ldr_pin_sensor_light)); Serial.print(" "); Serial.print(" Atuador:"); Serial.println(" "); /*Controle do teto*/ void Controle_teto(); if (analogRead(ldr_pin_sensor_light) >= 500 || analogRead(pinSensorChuva) > 700) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } /*configuração do cooler*/ void controle_Atuadores(); if (t >= 25.00) { Serial.println("Cooler ON"); digitalWrite(COOLER, LOW); } else { (t <= 24.00); Serial.println("Cooler OFF"); digitalWrite(COOLER, HIGH); } /*configuração da solenoide*/ if (ht > 600) { Serial.println ("Aberta solenoide"); digitalWrite (pinSolenoide, HIGH); } else { Serial.println ("Fechadao solenoide"); digitalWrite (pinSolenoide, LOW); } } } } -
C Analisem esse programa Pfv e digam se funcionara de acordo com o necessitado
Boladoloko respondeu ao tópico de Boladoloko em Microcontroladores
@aphawk Verdade, desculpe. Mas segui o conselho. eu testei (o programa do motor sem os outros complementares) e funcionou hehe, deu ate orgulho kkk, o único problema que deu foi... Quando juntei os outros programas (complementares) que tinha feito, O motor ficou rodando e parando como se tivesse com um delay quando trocava as funções pelo loop. alguma ideia do que seja ? não sei se preciso postar o programa mais ta aqui! /*livrarias usadas*/ #include "DHT.h" /*pinos usados sensores*/ #define pinSensorA0 A0 #define pinSensorChuva A1 #define DHTPIN A3 #define ldr_pin_sensor_light A4 /*pinos usados Atuadores*/ #define pinSolenoide 4 #define COOLER 3 #define pinMotor 5 /*PINOS FIM DE CURSO */ #define sunroof_open_switch 11 #define sunroof_closed_switch 12 /*Declaração do Dht e do tipo*/ #define DHTTYPE DHT11 DHT dht(DHTPIN, DHTTYPE); /*Variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; int direcao = 1; //direção do giro int passos_motor = 700; // Ajuste de acordo com o seu motor int sunroof_open_switch_value; //fim de curso teto aberto int sunroof_closed_switch_value; //fim de curso teto fechado void setup() { pinMode(COOLER, OUTPUT); pinMode(pinSolenoide, OUTPUT); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); Serial.begin(9600); dht.begin(); } void loop() { /*declaraçao de variavel*/ float t = dht.readTemperature(); float ht = analogRead(pinSensorA0); /*monitoramento temperatura*/ Serial.println(" "); Serial.print("TempDHT: "); Serial.print(t); Serial.println(" *C"); Serial.print(" Atuador1:"); Serial.println(" "); Serial.print(ht); Serial.print(" umidade:"); Serial.print(" "); delay(500);// delay de 1 seg para atualizaçao de dados /*Monitoramento da parte do motor e sensores do motor*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" sensor chegada: "); Serial.print(analogRead(ldr_pin_sensor_light)); Serial.print(" "); Serial.print(" Atuador:"); Serial.println(" "); /*Controle do teto*/ void Controle_teto(); if (analogRead(ldr_pin_sensor_light) >= 500 || analogRead(pinSensorChuva) > 700) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } /*configuração do cooler*/ void controle_Atuadores(); if (t >= 25.00) { Serial.println("Cooler ON"); digitalWrite(COOLER, LOW); } else { (t <= 24.00); Serial.println("Cooler OFF"); digitalWrite(COOLER, HIGH); } /*configuração da solenoide*/ if (ht > 600) { Serial.println ("Aberta solenoide"); digitalWrite (pinSolenoide, HIGH); } else { Serial.println ("Fechadao solenoide"); digitalWrite (pinSolenoide, LOW); } } } } -
Oi pessoal fiz esse programa para um teto solar, que vai utilizar um sensor LDR e um sensor de Chuva Sou iniciante nesse mundo estou aprendendo por causa do meu tcc,(não manjo muito mesmo,aprendi esse pouco de algumas aulas do YT e ajuda em fórum). Por favor analisem ele e digam se vai funcionar de acordo com o planejado. Bom, quando o LDR captar a luz envia sinal pro Arduíno abrir o teto, quando estiver escuro o teto fecha, o sensor de chuva vai ser como suporte quando ele captar os pingos, fecha o teto, quando não tiver sinal de chuva abre o teto.(também tem a questão dos fim de cursos que vão dizer se o teto estar aberto ou fechado, quero saber se eles não vão bugar e não fechar ou abrir quando acionados). /*pinos usados*/ #define pinSensorChuva A1 #define pinMotor 5 #define ldr_pin_sensor_light A4 //************************************************************************************ // correct these so they use valid Arduino pin numbers #define sunroof_open_switch 7 //pinos sensor fim de curso as portas nn foram definidas #define sunroof_closed_switch 8 // pinos sensor fim de curso as portas nn foram definidas //************************************************************************************ /*variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; /*direção do giro*/ int direcao = 1; // Volta completa pra formar 1 giro // Ajuste de acordo com o seu motor int passos_motor = 360; int sunroof_open_switch_value; int sunroof_closed_switch_value; void setup() { Serial.begin(9600); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); } void loop() { /*monitoramento*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" sensor chegada: "); Serial.print(digitalRead(ldr_pin_sensor_light)); Serial.print(" "); Serial.print(" Atuador:"); Serial.println(" "); /* Programa */ if (analogRead(pinSensorChuva) > 700 || analogRead(ldr_pin_sensor_light) >= 100 ) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } }


Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
