

Boladoloko
-
Posts
19 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que Boladoloko postou
-
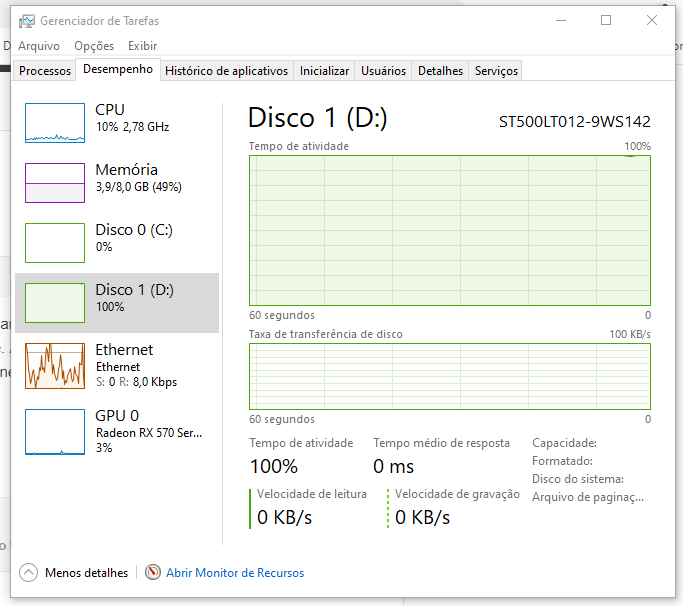
@mick 07 baixei o WD Data Lifeguard antes de formatar e tentei testar porém nn consegui, como ele ta em 100% de uso não carrega nada, ai agr fui no CMD e dei um CHKDSK e ta dizendo que ta no formato RAW vou tentar converter pra NTFS e ver como proceder mano...
-
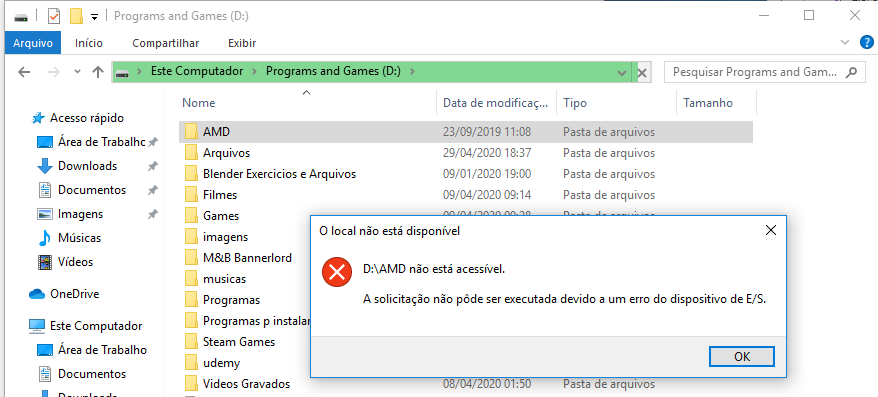
Eae glr, tenho um HD do meu antigo notebook montei um PC de entrada com ssd uns meses atrás e coloquei esse HD pra colocar arquivos alguns jogos etc. Aí esses dias ele vem parando de reconhecer quando início o PC e quando reconhece ele fica em fullload (100% de uso) quando faco qualquer ação nele. Alguém com alguma solução pra me ajudar? Pelo menos pra tentar recuperar os arquivos que estão nele? (Ah é quando ele para de reconhecer tenho que desconectar o sata e reconectar para ele poder reconhecer again, já testei em todas as entradas e troquei os satas porém mesmo jeito). já tentei vários métodos e até agr nada!!! me deem uma luz kkk Edit1: Formatei o PC e o erro continua no HD secundário e tá dando erro de E/S quando vou acessar alguma pasta.

-
olá recentemente tive problemas com minha fonte (de pessima qualidade), que quando a GPU pedia um pouco mais de energia desligava o pc, entao um amigo me deu a solucao de limitar a tensão pelo MSI afterburner innt vim perguntar se é seguro ou não pode causar algum dano a minha GPU ou outro componente... testei em alguns jogos que ela não passava nem 1 min com eles abertos. especificações: SO: W10 HDD: SSD crucial 240GB e HD 500GB Chipset: AMD R3 2200G placa-mãe: Biostar A320MH Memoria: Ballistix (2x4GB) 2666Mhz Placa de video: AMD radeon RX570 4gb Fonte: ATX 550W BRX B-S550W bivolt (esse maldita fonte)
-
PC Desligando em Games
Boladoloko respondeu ao tópico de Boladoloko em Computador desligando sozinho
@Elder Nauvirth Bom, obrigado pela informação e gostaria de perguntar também se recomenda algum software que faça monitoramento enquanto uso e dps passe um relatório ? faz ideia de algum ? -
PC Desligando em Games
Boladoloko respondeu ao tópico de Boladoloko em Computador desligando sozinho
@Elder Nauvirth vish!!! obrigado pela indicação já dei uma olhada nela aqui, já vai pra lista de compras... mas no caso é ela que não esta suportando o hardware? -
PC Desligando em Games
Boladoloko respondeu ao tópico de Boladoloko em Computador desligando sozinho
@Elder Nauvirth péssima tenho noção disso kk, mas foi a unica que deu pra comprar no momento em dezembro irei troca-la -
olá pessoal, recentemente comprei um PC "Gamer", mas em alguns games que rodo ele desliga algumas vezes, recentemente acontece muito isso enquanto jogo warframe... e apaga de uma hora pra outra, só consigo religar-lo quando desligo na chave on/off da fonte e já estou preocupado pois né, gastei uma boa graninha nele vcs sabem bem que dinheiro ta difícil de conseguir, e pra nos trabalhadores é um money valioso, pfv me deem uma luz. algum teste de stress? ou algo pra descobrir o problema !!! especificações: SO: W10 HDD: SSD crucial 240GB e HD 500GB Chipset: AMD R3 2200G placa-mãe: Biostar A320MH Memoria: Ballistix (2x4GB) 2666Mhz Placa de video: AMD radeon RX570 4gb Fonte: ATX 550W BRX B-S550W bivolt
-
C {iniciante} Como, e onde usar "millis()" nesse programa
Boladoloko respondeu ao tópico de Boladoloko em C/C#/C++
@Boladoloko olha só não funcionou o monitor serial que tu colocou mas o resto perfeitamente obrigado mano. -
C {iniciante} Como, e onde usar "millis()" nesse programa
Boladoloko respondeu ao tópico de Boladoloko em C/C#/C++
@Mateus2 obrigado vou testar e ver se funciona -
olá alguém pode me dizer 'como, quando e onde' usar a função "millis" nesse programa ? criei esse programa e descobri que o "delay" esta deixando meu programa com mal funcionamento (esta atrapalhando o giro do meu motor de passo), e como sou iniciante não sei usar o "millis", por favor ajudem esse jovem aprendiz. Necessito de ajuda rápido . programa: /*livrarias usadas*/ #include "DHT.h" /*pinos usados sensores*/ #define pinSensorA0 A0 #define pinSensorChuva A1 #define DHTPIN A3 #define ldr_pin_sensor_light A4 /*pinos usados Atuadores*/ #define pinSolenoide 4 #define COOLER 3 #define pinMotor 5 /*PINOS FIM DE CURSO */ #define sunroof_open_switch 11 #define sunroof_closed_switch 12 /*Declaração do Dht e do tipo*/ #define DHTTYPE DHT11 DHT dht(DHTPIN, DHTTYPE); /*Variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; /*direção do giro*/ int direcao = 1; // Volta completa pra formar 1 giro // Ajuste de acordo com o seu motor int passos_motor = 700; int sunroof_open_switch_value; int sunroof_closed_switch_value; void setup() { pinMode(COOLER, OUTPUT); pinMode(pinSolenoide, OUTPUT); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); Serial.begin(9600); dht.begin(); } void loop() { /*declaraçao de variavel*/ float t = dht.readTemperature(); float ht = analogRead(pinSensorA0); /*monitoramento Serial*/ Serial.println(" "); Serial.print("TempDHT: "); Serial.print(t); Serial.println(" *C"); Serial.print(" Atuador1:"); Serial.println(" "); Serial.print(ht); Serial.print(" umidade:"); Serial.print(" "); delay(500);// delay de 1 seg para atualizaçao de dados /*Monitoramento da´parte do motor e sensores do motor*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" sensor chegada: "); Serial.print(analogRead(ldr_pin_sensor_light)); Serial.print(" "); Serial.print(" Atuador:"); Serial.println(" "); /*Controle do teto*/ void Controle_teto(); if (analogRead(ldr_pin_sensor_light) >= 500 || analogRead(pinSensorChuva) > 700) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); millis(1000); digitalWrite(pino_passo, 0); millis(1000); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); millis(1000); digitalWrite(pino_passo, 0); millis(1000); } /*configuração do cooler*/ void controle_Atuadores(); if (t >= 25.00) { Serial.println("Cooler ON"); digitalWrite(COOLER, LOW); } else { (t <= 24.00); Serial.println("Cooler OFF"); digitalWrite(COOLER, HIGH); } /*configuração da solenoide*/ if (ht > 600) { Serial.println ("Aberta solenoide"); digitalWrite (pinSolenoide, HIGH); } else { Serial.println ("Fechadao solenoide"); digitalWrite (pinSolenoide, LOW); } } } }
-
C Analisem esse programa Pfv e digam se funcionara de acordo com o necessitado
Boladoloko respondeu ao tópico de Boladoloko em Microcontroladores
@aphawk Verdade, desculpe. Mas segui o conselho. eu testei (o programa do motor sem os outros complementares) e funcionou hehe, deu ate orgulho kkk, o único problema que deu foi... Quando juntei os outros programas (complementares) que tinha feito, O motor ficou rodando e parando como se tivesse com um delay quando trocava as funções pelo loop. alguma ideia do que seja ? não sei se preciso postar o programa mais ta aqui! /*livrarias usadas*/ #include "DHT.h" /*pinos usados sensores*/ #define pinSensorA0 A0 #define pinSensorChuva A1 #define DHTPIN A3 #define ldr_pin_sensor_light A4 /*pinos usados Atuadores*/ #define pinSolenoide 4 #define COOLER 3 #define pinMotor 5 /*PINOS FIM DE CURSO */ #define sunroof_open_switch 11 #define sunroof_closed_switch 12 /*Declaração do Dht e do tipo*/ #define DHTTYPE DHT11 DHT dht(DHTPIN, DHTTYPE); /*Variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; int direcao = 1; //direção do giro int passos_motor = 700; // Ajuste de acordo com o seu motor int sunroof_open_switch_value; //fim de curso teto aberto int sunroof_closed_switch_value; //fim de curso teto fechado void setup() { pinMode(COOLER, OUTPUT); pinMode(pinSolenoide, OUTPUT); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); Serial.begin(9600); dht.begin(); } void loop() { /*declaraçao de variavel*/ float t = dht.readTemperature(); float ht = analogRead(pinSensorA0); /*monitoramento temperatura*/ Serial.println(" "); Serial.print("TempDHT: "); Serial.print(t); Serial.println(" *C"); Serial.print(" Atuador1:"); Serial.println(" "); Serial.print(ht); Serial.print(" umidade:"); Serial.print(" "); delay(500);// delay de 1 seg para atualizaçao de dados /*Monitoramento da parte do motor e sensores do motor*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" sensor chegada: "); Serial.print(analogRead(ldr_pin_sensor_light)); Serial.print(" "); Serial.print(" Atuador:"); Serial.println(" "); /*Controle do teto*/ void Controle_teto(); if (analogRead(ldr_pin_sensor_light) >= 500 || analogRead(pinSensorChuva) > 700) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } /*configuração do cooler*/ void controle_Atuadores(); if (t >= 25.00) { Serial.println("Cooler ON"); digitalWrite(COOLER, LOW); } else { (t <= 24.00); Serial.println("Cooler OFF"); digitalWrite(COOLER, HIGH); } /*configuração da solenoide*/ if (ht > 600) { Serial.println ("Aberta solenoide"); digitalWrite (pinSolenoide, HIGH); } else { Serial.println ("Fechadao solenoide"); digitalWrite (pinSolenoide, LOW); } } } } -
Oi pessoal fiz esse programa para um teto solar, que vai utilizar um sensor LDR e um sensor de Chuva Sou iniciante nesse mundo estou aprendendo por causa do meu tcc,(não manjo muito mesmo,aprendi esse pouco de algumas aulas do YT e ajuda em fórum). Por favor analisem ele e digam se vai funcionar de acordo com o planejado. Bom, quando o LDR captar a luz envia sinal pro Arduíno abrir o teto, quando estiver escuro o teto fecha, o sensor de chuva vai ser como suporte quando ele captar os pingos, fecha o teto, quando não tiver sinal de chuva abre o teto.(também tem a questão dos fim de cursos que vão dizer se o teto estar aberto ou fechado, quero saber se eles não vão bugar e não fechar ou abrir quando acionados). /*pinos usados*/ #define pinSensorChuva A1 #define pinMotor 5 #define ldr_pin_sensor_light A4 //************************************************************************************ // correct these so they use valid Arduino pin numbers #define sunroof_open_switch 7 //pinos sensor fim de curso as portas nn foram definidas #define sunroof_closed_switch 8 // pinos sensor fim de curso as portas nn foram definidas //************************************************************************************ /*variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; /*direção do giro*/ int direcao = 1; // Volta completa pra formar 1 giro // Ajuste de acordo com o seu motor int passos_motor = 360; int sunroof_open_switch_value; int sunroof_closed_switch_value; void setup() { Serial.begin(9600); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); } void loop() { /*monitoramento*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" sensor chegada: "); Serial.print(digitalRead(ldr_pin_sensor_light)); Serial.print(" "); Serial.print(" Atuador:"); Serial.println(" "); /* Programa */ if (analogRead(pinSensorChuva) > 700 || analogRead(ldr_pin_sensor_light) >= 100 ) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } }
-
Arduino Arduino + Fim de curso da uma forçinha *-*
Boladoloko respondeu ao tópico de Boladoloko em Microcontroladores
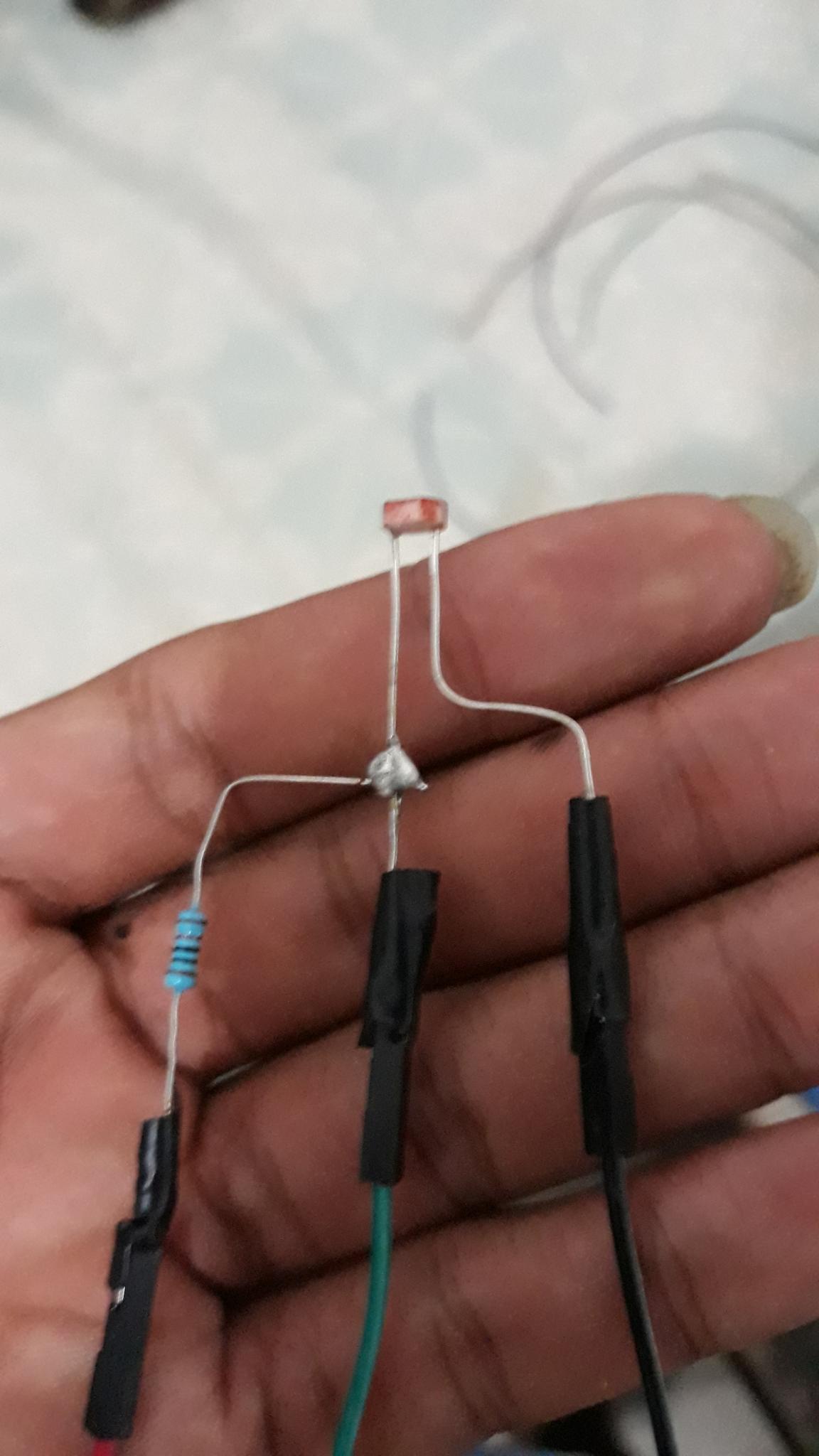
kkkkkkkkk eu ainda nn tinha soldado no fim de curso, mas eu tinha um ldr cm o cabo soldado do jeito que achei que seria e enviei pra mostrar o exemplo dos cabos kkkk, o ler era só o "brinde kkkkk
-
Arduino Arduino + Fim de curso da uma forçinha *-*
Boladoloko respondeu ao tópico de Boladoloko em Microcontroladores
Mais ou menos assim? @aphawk
-
Arduino Arduino + Fim de curso da uma forçinha *-*
Boladoloko respondeu ao tópico de Boladoloko em Microcontroladores
@aphawk Otimo muito obrigado -
Arduino Arduino + Fim de curso da uma forçinha *-*
Boladoloko respondeu ao tópico de Boladoloko em Microcontroladores
@aphawk valeu mano, mas só estou no momento com resistor de 1k e 10k, funcionaria se eu colocasse 4 de 1k em serie ? ou colocasse 1 de 10k? -
Arduino Arduino + Fim de curso da uma forçinha *-*
Boladoloko postou um tópico em Microcontroladores
olá galera estou com um projeto que utiliza 2 fins de curso um para dizer que o teto esta fechado e outro para dizer que esta aberto encontrei 2 fins de cursos que eu tinha e quero utilizar eles no Arduíno é necessário ter o modulo/drive dele ou posso fazer uma ligação direta para os 3 pinos do fim de curso para o Arduíno ? se possível e como seria a pinagem quem seria GND, Dados e VCC ? Os pinos são: NO, NA e o C (comum). -
valeu ajudou pakas obrigado, e a parte do: #define sunroof_open_switch 55 #define sunroof_closed_switch 56 entendeu para o que serviria ?
-
Olá pessoal, sou iniciante na programação e estou montando um projeto de um teto solar em uma estufa (tudo controlado pelo Arduino UNO), eu e um amigo estrangeiro do "reddit" montamos esse código. Eu fiz o código base que trabalha com um sensor de chuva para abrir ou fechar quando o tempo mudasse, e ele melhorou bastante mas nessa melhora que ele fez ele adicionou dois #defines, que acho que seriam para sensores de parada do teto na abertura e no fechamento, se puderem me ajudar identificando o que ele quis fazer agradeço. Mas o problema maior não é esse, preciso que esse teto trabalhe tanbem com um sensor LDR para quando estiver de dia o teto abrir e a noite fechar mas como sou muito iniciante, não tenho noção de como fazer isso. É nessa parte que peço a ajuda de vocês, se podem implementar esse meu código colocando tal função. por favor! /*pinos usados*/ #define pinSensorChuva A1 #define pinMotor 5 //************************************************************************************ #define sunroof_open_switch 55 // these pin numbers need to be corrected #define sunroof_closed_switch 56 // these pin numbers need to be corrected //************************************************************************************ /*variaveis globais*/ int pino_passo = 5; int pino_direcao = 4; /*direção do giro*/ int direcao = 1; // Volta completa pra formar 1 giro // Ajuste de acordo com o seu motor int passos_motor = 360; int sunroof_open_switch_value; int sunroof_closed_switch_value; void setup() { Serial.begin(9600); pinMode(pino_passo, OUTPUT); pinMode(pino_direcao, OUTPUT); pinMode(sunroof_open_switch, INPUT_PULLUP); pinMode(sunroof_closed_switch, INPUT_PULLUP); } void loop() { /*monitoramento*/ Serial.print(" SensorChuva:"); Serial.print(analogRead(pinSensorChuva)); Serial.print(" "); Serial.print(" Atuador:"); /* Programa */ if (analogRead(pinSensorChuva) > 700) { // if the sunroof is not full open sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO ABERTO"); direcao = 1; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_open_switch_value = digitalRead(sunroof_open_switch); if (sunroof_open_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } else { // if the sunroof is not full closed sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 1) // switch not closed, prepare to run motor { Serial.println("TETO FECHADO"); direcao = 0; digitalWrite(pino_direcao, direcao); for (int p = 0 ; p < passos_motor; p++) { sunroof_closed_switch_value = digitalRead(sunroof_closed_switch); if (sunroof_closed_switch_value == 0) // switch is closed, DO NOT make motor run break; digitalWrite(pino_passo, 1); delay(1); digitalWrite(pino_passo, 0); delay(1); } } } }


Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
