

aphawk
-
Posts
8.314 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que aphawk postou
-
Pessoal, fiz um controlador de temperatura para aquário, com memória do valor de setup, e alarme em caso da temperatura demorar muito para subir, usando como sensor um LM35 . Estou fazendo o Upload do novo Tutorial, lá está o circuito completo ( menos a fonte de 5 volts .... ) e o código fonte comentado em Basic. Aproveitei e expliquei como funciona uma rotina para cancelar ruidos induzidos vIa 60 Hz, e mostrei o uso de um amplificador de sinais para baixa tensão de alimentação. Bons usos ! Paulo
-
Opa .... tem certeza disto ? No Bascom os Integer vão de -32768 a +32767 .... nao sei como ele irá atribuir um número negativo a um byte. Isto veio do manual do Bascom : In BASCOM-AVR when you perform operations on variables they all must be of the same data type. long = long1 * long2 ' for example The assigned variables data type determines what kind of math is performed. For example when you assign a long, long math will be used. If you try to store the result of a LONG into a byte, only the LSB of the LONG will be stored into the BYTE. Byte = LONG When LONG = 256 , it will not fit into a BYTE. The result will be 256 AND 255 = 0. Of course you are free to use different data types. The correct result is only guaranteed when you are using data types of the same kind or that result always can fit into the target data type. Eu mesmo já testei de Long para Word, e de Long para Byte, ambas funcionaram. No caso que voce citou : w=getadc onde w é do tipo byte Pode acontecer a mesma coisa do exemplo do Long=256 virar 0 em uma variável tipo Byte. Se o valor do ADC for 512, também pode acontecer ser w=0. Me parece que para que a sua expressão w=getadc funcione, o valor retornado deve ser menor do que 255. Acho que o que é garantido mesmo é isto, que também tirei do manual : SINGLE CONVERSION When you want to convert a SINGLE into a byte, word, integer or long the compiler will automatic convert the values when the source string is of the SINGLE data type. integer = single You can also convert a byte, word, integer or long into a SINGLE by assigning this variable to a SINGLE. single = long Pelo menos eu já usei eem um programa e funcionou direitinho .... Bom, vai saber se realmente funciona sempre .....o jeito é evitar usar estas conversões, se for possível ! Manda bala nos testes e informa a gente ! Paulo
-
Valeu, Playmobil, Olha, no manual do BASCOM diz que o próprio compilador se encarrega de converter os dados de um tipo de variável para outro tipo, quando voce faz algum cálculo com tipos diferentes... mas comigo não deu certo, por mais de uma vez. Faz o teste, e se continuar estranho, poste o programa que eu tento rodar aqui comigo ok ? Um abraço. Paulo
-
Pois é, Test man, eu também sofrí uma barbaridade com isso, a gente se acostuma e acha que os compiladores são iguais às calculadoras HP !!!!! Já tive erros desse tipo, tanto no Bascom, como no PSI, e demorei pacas para achar, e era exatamente isso que estava acontecendo ! A grande vantagem do BASCOM é que os AVR´s possuem MUITO mais RAM do que os PIC´s, e quase sempre declaro todas as variáveis ( que serão envolvidas em qualquer tipo de conta ) como LONG, ganho um bom tempo na depuração ! Valeu pelo comentário, realmente não sabia que o C também tem esses problemas, vai ajudar muita gente ! Paulo
-
Vamos lá : Declare a variável que vai receber o valor do ADC como Long, assim voce pode fazer até numeros fracionários nas contas. Após a sua leitura do ADC, divida ela por 4, e é a mesma coisa que truncar os 2 bits LSB. Mas lembre que agora sua escala vai de 0 até 255 ! Nas contas, lembre-se da regra de ouro : APENAS UMA OPERAÇÃO MATEMÁTICA EM CADA LINHA ! Em vez de w=(x/255)*5 , ( supondo que w e x sejam Long ! ) Faça w = x/255 E na próxima linha : w =w*5 Já ví que voce tentou isto, não sei o porque não deu certo. Mude essas variáveis para o tipo Long, ok ? Se voce já fez isso tudo, pode ser problema de STACK , voce teria de mudar o stack do programa caso use estruturas do tipo subrotina chamando outra subrotina. Veja se dá certo agora, senão poste o seu programa e eu vou simular para ver onde está o erro. Um abraço. Paulo
-
Valeu, meu amigo ! Sempre gostei de ensinar, mas da minha maneira pessoal, tentando fazer o leitor entender um pouco de todo o projeto junto, tento dar a visão de conjunto. Acho que só assim se aprende a projetar alguma coisa, Já está feita a correção no tutorial, e os novos experimentos devo terminar até domingo, ok ? Aliás, acho que vou fazer melhor, tem uma dúvida que quase sempre o pessoal me pergunta no outro tutorial sobre os PIC´s, que é como usar o LM35 para medir as temperaturas, e como tem uns truques para isso, acho que vou fazer um único projeto com tudo isso, um termômetro que grava a temperatura na memória serial I2C a cada minuto, e depois apresenta uma tensão de saída proporcional à temperatura no conversor digital-analógico R/2R, tipo 0 a 5 volts para temperaturas entre 0 e 50 graus. Vou implementar também uma saída para controlar algo externo, tipo um aquecedor, e outra saida para um resfriador, a finalidade é tentar manter a temperatura controlada. Só que neste caso talvez só fique pronto depois de domingo, afinal pretendo viajar sábado e só brincar no protoboard no domingo.... Mas, como sempre, depende do tempo, e pelo frio e garoa que está, num sei não.... Quanto ao PROTEUS, não espere exatidão na temporização, afinal ele é um EMULADOR. Os tempos sempre vão ser bem maiores do que deveriam. Bons estudos ! Paulo
-
Test man, Eu vou fazer algo simples para ilustrar o uso de conversor D/A tipo R/2R, só para dar uma ideia de como se faz, ok ? E na sequência, vou também colocar um exemplo com uma memória flash serial I2C e visualizar nos displays de 7 segmentos e converter o valor para analógico no R/2R. Vou colocar um transistor com um LED na saída do R/2R, assim poderemos ver a variação de brilho de acordo com a variação da tensão de saida do conversor. Quanto ao exemplo que voce falou, no tutorial, realmente eu comí bola .... o desenho está errado, vou alterar o tutorial ainda hoje. Ou altero o desenho, ou altero o programa e os comentários....Tá vendo o porque que eu não faço um livro ????? Preciso de um revisor ..... é muito difícil quem escreve achar os próprios erros ! Aliás, o que aconteceu foi o seguinte, durante os testes, acabei ligando errado o pino do AVR, e foi ligado para o terra em vez de ir ao Led. Com isso , danifiquei o pino de saída do AVR, e ele não funcionava mais, acabei mudando o LED para um outro pino e corrigí o programa, mas acabei mantendo o pino errado no desenho... Não sou professor não, alguns amigos aqui no CDH tiram um sarro e me chamam de mestre, mas sou um simples engenheiro, e como hoje a eletrônica é um hobby para mim, não custa passar o que aprendí a quem se interessa. Vou colocar esses 2 exemplos que voce me pediu até a semana que vem, ok ? Um abraço ! Paulo
-
Felipe, Legal, já baixei o software, mas o código que voce postou ficou truncado.... será que dá para voce colocar ele como texto simples, ou um link para download ? Já estou estudando para ver como funciona isso !!!!! Um abraço. Paulo
-
Muito legal, Felipe, o amplificador classe D é muito interessante, existem muitos truques para abaixar a distorção, você leu a documentação da TRIPATH sobre os CI´s deles para amplificadores classe D e T ? Se não me falha a memória, eles explicam alguns algoritmos sobre como conseguiram distorção abaixo de 0.1 % em mais de 200 Watts. Ah, voce falou duas coisas que me interessam bastante : filtros digitais e FFT ( dft ) . Eu preciso ver alguns algoritmos sobre isso ! Lembra que eu te falei que tinha um velho sonho, fazer um analizador de espectro de áudio ? Eu queria conseguir decompor um sinal de áudio em 10 frequências ( 32,64, 128,256,512,1024,2048,4096,9102, 16384 ), e obter as amplitudes relativas dele, a fase não interessa. Como eu não estudei e nem trabalhei com isso, voce pode me passar pelo menos um algoritmo, eu vou tentar fazer a implementação em Basic ? Como eu ví um cara fazer algo semelhante em Assembler, usando um PIC de 1998, acredito que consiga fazer isso hoje em Basic, com um AVR a 20 Mhz. E uma outra coisa que estou fazendo hoje, eu preciso fazer um filtro para obter as amplitudes dos sinais de graves, médios e agudos, o que eu fiz foi usar um ampop quádruplo, fazer um filtro passa-baixas, um passa faixa, e um passa altas, e retificar a saida deles para medir no ADC; mas sei que é possível fazer isso por software... se voce tiver um algoritmo para isso, e puder me passar, ajudaria bastante ! É bem difícil achar algo prático na Internet, achei teoria de monte, mas não consegui entender como fazer o programa. Não sei se ajudaria, mas eu tive uma ideia meio maluca, em vez de fazer apenas um dos ADC ficar sampleando o sinal, fazer 3 ADC´s obtendo o sampling do mesmo sinal de áudio, sendo um para os graves, um para os médios, e o outro para os agudos, não simplifica o software, devido a podermos diferenciar a taxa de sampling ? Lembro que novamente só preciso das amplitudes relativas, as fases não me interessam. Qualquer ajuda será muito útil ! Um abraço ! Paulo
-
Opa, valeu pela informação, Felipe !!!! Ué, e desde quando você precisa de permissão minha ????? Afinal, voce é o nosso Grande Mestre em Assembly, entre tantas outras áreas de hardware, e sempre ajuda a todos nós como o seu conhecimento e experiência, e aqui, como em tantos outros tópicos, tem todo o direito de se pronunciar, e inclusive criticar quando necessário ! Conto com você para me corrigir sempre que necessário ! Na verdade, eu havia digitado AVR32 quando eu queria dizer ATMEGA32 hehehe, nem sabia que existe uma família AVR32 ! Foi uma grata surpresa. Errei e tentei consertar depois, mas não havia deixado claro o meu erro :( ! Agora consertei até no meu tópico original , para não haver dúvidas . Mas , agora que voce informou sobre essa nova família, vou dar uma olhada nela agora mesmo !!!! Pena que o BASCOM ainda não roda com ela .... E você, meu amigo, já está brincando com os AVR´s em Assembly ? Um abraço ! Paulo
-
domafero e testman, Fico contente que esteja sendo útil para vocês ! Usar um gravador ICSP realmente ajuda bastante, pois pode-se usar um protoboard para todos os testes, sem ter o incomodo de retirar o chip para gravar e depois recolocar no protoboard, e sempre tem umas "pecinhas" que acabam soltando e fazem a gente perder um tempão ! Existem circuitos baratos para usar via serial ou via paralela, mas eu recomendo usar um via USB, é bem mais versátil, pois pode ser ligado em notebooks também. Eu baseei o tutorial no ATMEGA168, mas nada impede de usar qualquer um dos ATMEGAS, desde que tenha pelo menos 4K de flash. Eu sugiro mesmo o ATMEGA168, pois é um baita produto pelo custo dele .... 512 de RAM e 16K de flash é uma maravilha para quem trabalhava com os PICs .... Quanto ao AVR32 ( desculpe, eu havia pensado ATMEGA32 mas sei lá o motivo digitei AVR32 ... ), o modelo correto é ATMEGA32 , tem 40 pinos, ( bastante portas de I/O !!!! ), 32K de flash, 2K de RAM, e olhe que até agora o máximo que usei dele foi 700 bytes de RAM e 5K de flash .... Só para terem uma ideia, implementei em Basic um sistema de controle de luminosidade de LED´s via PWM, com 12 canais , por software, e ele por sí só ocupou menos de 1K de flash e menos de 50 bytes de RAM. Como podem ver, dá para fazer muiiita coisa com ele ! Quanto a modelos de AVR´s, eu sugiro sempre pensar no ATMEGA8, ATMEGA168 e ATMEGA32, pois são baratos e fáceis de encontrar. Existe um modelo especial do ATMEGA168, se não me engano é o ATMEGA168V, que trabalha a partir de 1.8 Volts !!!!! Esse é fantástico para quem quiser montar projetos alimentados por pilhas ou baterias ! Eu comprei eles no Mercado Livre baratinho, acho que foi uns R$ 5,00 mais caro que o normal. A única desvantagem, em relação ao ATMEGA168 normal, é que ele trabalha no máximo a 10 Mhz, mas como geralmente usamos o clock interno que é sempre 8 Mhz no máximo, isso não me causou nenhum problema até agora. Bons usos, e se tiverem alguma sugestão, é só falar, ok ? Um abraço. Paulo
-
Valeu Test Man, Estou tentando fazer o mesmo trabalho que fiz com o tutorial sobre PIC's, felizmente eu escolhi usar o BASCOM, que não tem um simulador poderoso igual ao ASI ( AVR Simulator -> é idêntico ao PSI, só que usando processadores AVR ), mas tem tanta coisa a mais que dá um poder quase ilimitado, fora que existem bibliotecas prontas para quase tudo o que voce imaginar. Existe até um DOS para usar em pen-drives e cartões de memória ! Quanto à parte 2 , em vez disso, vou atualizando o tutorial conforme tenho novas idéias em meus hobbies. Se, um dia (...) , eu achar que ele está pronto, pelo menos o básico, eu concluo ele e começarei OFICIALMENTE a parte 2. Mas isto deve demorar, pois ainda tenho de mostrar algumas coisas, como comunicação IR, RF, Pots digitais, etc ..... Agora, voce falou algo sobre o link no início do Tópico .... tem razão, eu cliquei e veio o tutorial do PSI !!!!! Eu mesmo fiz besteira na quinta-feira, quando atualizei o tutorial do PSI. Obrigado pelo aviso, já consertei o link, pode baixar ele novamente, ok ? Sabe que tem uma coisa interessante ? Muita gente pediu para eu fazer sobre os AVR's em vez dos PIC's, agora que eu fiz, e estou incrementando ele conforme tenho idéias novas, ninguém está se interessando ! Mas uma coisa eu posso dizer, estou fazendo coisas com os AVR's em BASCOM que são totalmente impossíveis de serem feitas com os PIC's em qualquer tipo de linguagem Basic, fora as vantagens do hardware do AVR em termos de preço versus o que se obtém ! Por exemplo, estou fazendo um circuito para a minha moto meio maluco, vou te adiantar para voce imaginar : Tenho 2 lanternas dianteiras e duas traseiras, estou trocando elas por LED's RGB de 5 Watts, e estou implementando até um microfone ( !!! ) no circuito, quando a moto estiver desligada, posso transformar as lanternas em uma luz rítmica, assim se tiver alguma música tocando alta nos carros perto dela, ela vai fazer o maior show de luzes ! Vai ter motoqueiro de queixo caído heheheh ! Fora que agora vou ter um PISCA-ALERTA, e um aviso quando a moto sai do neutro e engato a primeira ( tipo um flash de luz verde nas lanternas traseiras ), as 4 lanternas acendendo em branco quando estiver em situação normal, etc. No ano passado, tentei fazer isto com um PIC, mas não deu para escrever todo o código, pois precisava de uma memória RAM maior. ( 256 bytes é muito pouco ! ) Agora, usando o ATMEGA32, tenho 2K de RAM, e 32K de Flash, por um custo abaixo de R$ 35,00 !!!! Isso que está me incentivando a prosseguir, uma hora o pessoal vai perceber que só terão vantagens migrando para os AVR's . Qualquer dúvida, pode postar, e obrigado por me avisar, ok ? Um abraço. Paulo
-
Amigo Denken, Tenho a certeza de que voce vai se divertir muito aqui no Clube, pois muitos como você que hoje estão aqui , ensinando aos iniciantes, começaram EXATAMENTE da mesma maneira : como um hobby !!! Siga seu instinto, use a Internet, existem muitos sites que são realmente bem didáticos, e quando tiver alguma dúvida, é só postar que a gente responde com a maior satisfação em ajudar ! Aproveito e mando um grande abraço ao amigo ( sumido !!!!! hehehehe) digam AMD !!!! Paulo
-
Acabei de ver um LED RGB de alta potência ( 5 Watts !!! ) que já vem com dissipador de metal, angulo de visão de 140 graus a um custo de cerca de R$ 50,00 . Isto permite fazer um velho sonho que eu sempre tive, que é trocar o sistema de lanternas da minha moto ( as 4, duas na frente e duas atrás ) por um sistema inteligente com AVR, que vai fazer as lanternas acenderem em Branco quando estiver acesa em situação normal, amarela quando ligarmos a seta, e vermelha quando estiver com freio acionada, inclusive vou tentar fazer o vermelho do freio tipo Flash para chamar mais a atencão. E, claro, vou incluir um sistema de pisca-alerta, onde todas as 4 lanternas ficam piscando, trocando as cores ao mesmo tempo. É um bom exemplo do uso de PWM em Basic, e vai servir como um exemplo real de ligação no ambiente da moto, que possui ruidos de ignição que normalmente atrapalham alguns projetistas. Se alguém tiver alguma sugestão, poste que irei analisar, ok ? Assim que o protótipo ficar pronto eu incluo no Tutorial. Paulo
-
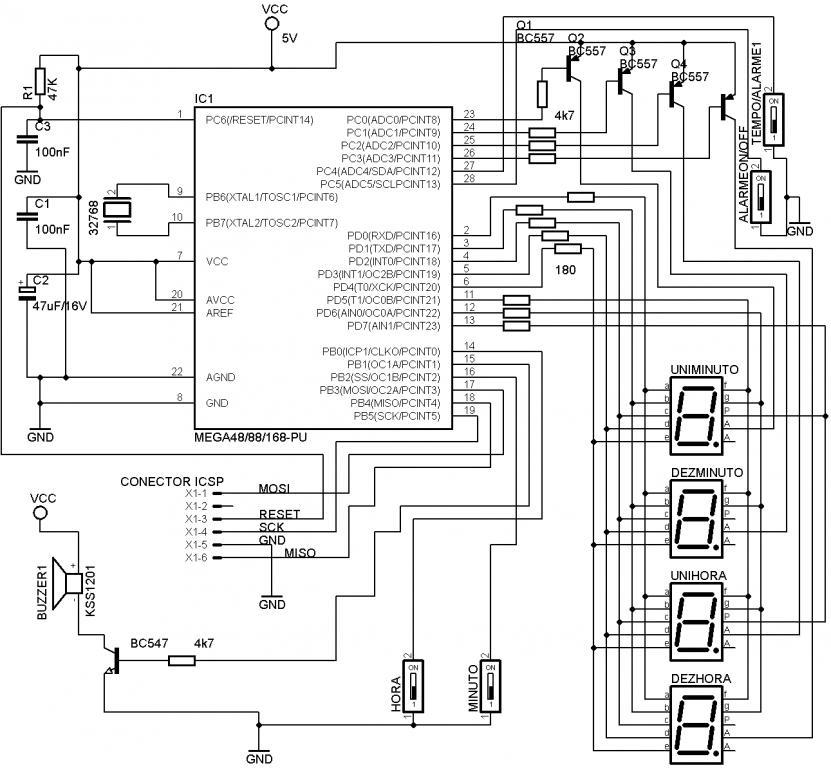
Pessoal, já está atualizado o tutorial sobre programação de AVR em Basic. com um projeto de relógio despertador usando um AVR, ficando muito simples e barato. Segue o esquema do relógio, que ficou muito simples, podendo servir como um excelente relógio a ser montado por iniciantes e até mesmo para trabalhos de TCC. Quem se interessar basta fazer o download. Para facilitar a sua montagem, segue o arquivo .HEX para ser gravado no AVR : http://www.4shared.com/zip/_-8SGqI0/relogio.html Bons usos. Paulo

-
Bem lembrado, Bcpetronzio ! Eu estou estranhando a ligação do transistor que está ligado direto na saida do operacional... parece que é uma fonte de corrente constante, e pode ser que essa configuração acabe limitando a excursão do sinal AC do ampop, mas vale a pena tentar ! Se ocorrer essa limitação, experimente repolarizar esse transistor, pode ser que resolva ... Revelino, verifique com um osciloscópio se essa limitação da excursão AC é simétrica, ou se ocorre em apenas um dos semi-ciclos da senóide, isso ajudaria a entender o mecanismo para podermos melhorar, ok ? Paulo
-
O ideal seria voce trocar o ampop TL071 por um dos modernos Rail-to-Rail, eles iriam saturar apenas a 0,5 volts da tensão de alimentação, se alimentar com + - 18v voce consegue obter cerca de 34 V p-p sem distorção visível. Paulo
-
Se eu me lembro bem, o limite de tensão desses transistores de potência é de 140 Volts, e voce está exatamente no limite !!!! ( +70v e -70v ) Isso não deve fazer os transistores esquentarem mais do que deveriam, apenas faz voce correr o risco de queimar eles fazendo entrar em curto por ruptura de tensão, independente de qualquer outra coisa... acho que o problema mesmo é dissipar todo o calor gerado nos transistores ! Eu abaixaria um pouco a tensão, para não ficar tanto no limite. Se a fonte não for do tipo estabilizada ( e com certeza não é ), caso a tensão da rede aumentar um pouco, por exemplo, de 110v para 120 Volts, seu amplificado vai queimar com certeza pois estará alimentado com uns 76 volts, dando um total de 152 volts e com certeza seus transistores vão pifar. Claro que abaixando a tensão um pouco, por exemplo, para 65 volts, voce estará diminuindo a tensão pico a pico sobre a carga em 10 volts. Fazendo as contas : ANTES - 70 VOLTS ALIM. - 400W -> TENSÃO NA CARGA DE +- 56 volts. DEPOIS - 65 VOLTS ALIM. - TENSÃO NA CARGA DE +- 46 VOLTS -> 264 W Esse seria o limite de seu amplificador, com a tensão original do projeto. Cerca de 260 Watts em 8 ohms, mas pelo que eu ví ele foi projetado para trabalhar com impedâncias abaixo de 4 ohms. Acredito que com uma carga de 4 ohms a potencia vai ser maior do que os 400 W , mesmo com a tensão reduzida para 65 volts, e os transistores vão aguentar, DESDE QUE exista uma excelente dissipação ( experimente fazer um dissipador ativo com alguns coolers ). Um abraço. Paulo
-
Caramba, Faller, não tinha percebido que a impedância de carga era de 0,5 ohms .... porisso que voce disse 95A ..... a coisa ficou ainda pior, pois se essa é a corrente média na carga, os picos podem ser ainda maiores ! Fico imaginando uma fonte dessas, 65+65 por 100A, são 13.000 watts .... mais do que 2 chuveiros juntos ! Já pensou a fiação da casa ?????? Haja diodo E capacitor eletrolítico na fonte para manter isso ! Com certeza, esse amplificador não fornece toda essa potência, procure por um outro cujas especificações sejam mais realistas ! Valeu pessoal ! Paulo
-
Revelino, O FALLER está certo.... não fiz os cálculos , mas de cara já sei que seriam necessários no mínimo uns 40 ampéres, se tivesse um rendimento de 100% ( que não existe... ) . Supondo um rendimento máximo da ordem de 65%, eu chutaria uns 60 Amperes .... mas a dificuldade é a mesma se fosse 95 !!!! Mas ainda duvido que com só 8 transistores de potência seja possível obter tudo isto, são cerca de 575 Watts por transistor ( isso só de áudio ), ou mais de 800W totais se levarmos em conta o rendimento. Ou seja, 225 Watts são dissipados em forma de calor ! Pode ser que eu esteja errado, pois faz muito tempo que trabalhei com isto, mas gostaria de saber COMO um transistor de no máximo 250 watts consegue dissipar 225 Watts se olhando a curva SOA ele aguenta no máximo 3A com 70 volts ... Para mim, seriam necessários pelo menos umas 20 vezes mais transistores !!! Agora, olhando bem o esquema, está informado que são 9600W PMPO .... em RMS seriam umas 8 vezes menor. Na minha opinião, esse esquema forneceria uns 600 Watts RMS, usando a curva SOA dos MJ15003 e 15004 . Alguém com conhecimento REAL pode informar melhor a todos nós ? Paulo
-
Fiz um relógio digital com alarme, com 4 dígitos LED e um AVR, sem usar nenhum RTC separado, usei o próprio RTC do Counter2 do AVR. Ficou legal, porque é um projeto que usa 2 timers diferentes com suas interrupções, um para fazer os displays multiplexados, e o outro gera a base de tempo com um único cristal de 32768 Khz. Tudo programado só com Bascom, vou incluir no tutorial este fim de semana. Quem já fez o download, faça um download novo a partir de segunda-feira, ok ? Paulo
-
Opa, IAS, valeu meu amigo, o que importa é que voce já tem experiência do BASIC com PIC´s, fica muito mais fácil usar os AVR´s com o Bascom ! E voce vai perceber que o BASCOM é o sonho de qualquer programador, possui funções de strings super-completas, trabalha com números reais e fracionários, tem funções matemáticas de tudo o que você precisar, enfim, eu que me acostumei com o Basic do PSI, que é bem limitado, me sinto no paraíso quando uso o Bascom ! Manda bala e depois me fala ok ? Um abraço. Paulo
-
Opa, bons usos , test man, espero que ache ele legal, aliás, fica aqui um pedido que faço a todos que estejam lendo, se gostarem do tutorial, por favor, dêem uma nota a este tópico..... no tutorial que eu fiz de PIC, tem centenas de acessos, mas ninguém deu uma única nota para ele ....... heheheh po o ego agradece muito !!!!!! Abraços a todos ! Paulo
-
Só para manter o tópico atualizado ... Achei um bug do Bascom ..... declarei uma variável do tipo WORD ( pode ir de 0 até 65535 ), e fiz um loop usando o FOR - NEXT com ela, indo de 0 até 9999 , e o loop abortava quando o valor da variável chegava a 236 .... não conseguí achar o motivo, e só resolveu o problema quando eu declarei a variável como Long . Aliás, esse bug foi justamente no exemplo do tutorial sobre um contador de 0 até 9999 com 4 displays de 7 segmentos. Repare que eu tive de declarar ela como Long ! Fica aqui o aviso, pois é um daqueles bugs difíceis de se achar, pois tive de ficar acompanhando a contagem para perceber o bug ! Paulo
-
Felipe e Cácio, Obrigado a vocês, meus amigos, a área dos AVR's também é bem nova para mim, e peço a ajuda de vocês, como sempre, para qualquer dúvida dos usuários iniciantes ! Aliás, gostaria que vocês dessem uma boa olhada no tutorial, como eu escreví ele a toque de caixa, podem existir alguns erros que eu não tenha revisto. Estou começando amanhã a escrever a segunda parte, espero terminar logo ! Um abraço a vocês, amigos ! Paulo Opa -> Felipe, se voce quis dizer o AVR Simulator Ide, os programas que eu gerei no Bascom, que utilizam o Timer0, não conseguí fazer a simulação..... mas os que não envolveram interrupções do Timer, funcionaram direitinho !

Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
