

Lucas Pereira de Souza
-
Posts
75 -
Cadastrado em
-
Última visita
-
CSS Refomulção de um site
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Web e banco de dados
Já achei a solução uhaauhauh. -
@import url(http://fonts.googleapis.com/css?family=Roboto:400,700,300); .clearfix { *zoom: 1; } .clearfix:before, .clearfix:after { display: table; content: ""; line-height: 0; } .clearfix:after { clear: both; } .hide-text { font: 0/0 a; color: transparent; text-shadow: none; background-color: transparent; border: 0; } .input-block-level { display: block; width: 100%; min-height: 30px; -webkit-box-sizing: border-box; -moz-box-sizing: border-box; box-sizing: border-box; } body { padding-top: 80px; color: #5e5e5e; background: #ffffff; /*font-family: 'Roboto', sans-serif;*/ /*texto que foi modificado*/ font-family: Arial, Helvetica, sans-serif; font-weight: 300; } .corpo{ padding-top: 80px; color: #5e5e5e; background: #ffffff; /*font-family: 'Roboto', sans-serif;*/ /*texto que foi modificado*/ font-family: Arial, Helvetica, sans-serif; font-weight: 300; } h1, h2, h3, h4, h5, h6 { font-family: 'Roboto', sans-serif; font-weight: 400; } a { color: #34495e; -webkit-transition: 300ms; -moz-transition: 300ms; -o-transition: 300ms; transition: 300ms; } hr { border-top: 1px solid #e5e5e5; border-bottom: 1px solid #fff; } .btn { font-weight: 400; } .btn-transparent { border: 3px solid #fff; background: transparent; color: #fff; } .btn-transparent:hover { border-color: rgba(255, 255, 255, 0.5); } a:hover, a:focus { color: #d9534f; text-decoration: none; outline: none; } .dropdown-menu { margin-top: -1px; min-width: 180px; } body > section { padding: 50px 0; } .turquoise, .green-sea, .sun-flower, .orange, .emerald, .nephrits, .carrot, .pumkin, .peter-river, .belize-hole, .alizarin, .pomegranate, .amethyst, .wisteria, .clouds .silver, .wet-asphalt, .midnight-blue, .concrete, .asbestos { color: #fff; } .turquoise h1, .green-sea h1, .sun-flower h1, .orange h1, .emerald h1, .nephrits h1, .carrot h1, .pumkin h1, .peter-river h1, .belize-hole h1, .alizarin h1, .pomegranate h1, .amethyst h1, .wisteria h1, .clouds .silver h1, .wet-asphalt h1, .midnight-blue h1, .concrete h1, .asbestos h1, .turquoise h2, .green-sea h2, .sun-flower h2, .orange h2, .emerald h2, .nephrits h2, .carrot h2, .pumkin h2, .peter-river h2, .belize-hole h2, .alizarin h2, .pomegranate h2, .amethyst h2, .wisteria h2, .clouds .silver h2, .wet-asphalt h2, .midnight-blue h2, .concrete h2, .asbestos h2, .turquoise h3, .green-sea h3, .sun-flower h3, .orange h3, .emerald h3, .nephrits h3, .carrot h3, .pumkin h3, .peter-river h3, .belize-hole h3, .alizarin h3, .pomegranate h3, .amethyst h3, .wisteria h3, .clouds .silver h3, .wet-asphalt h3, .midnight-blue h3, .concrete h3, .asbestos h3, .turquoise h4, .green-sea h4, .sun-flower h4, .orange h4, .emerald h4, .nephrits h4, .carrot h4, .pumkin h4, .peter-river h4, .belize-hole h4, .alizarin h4, .pomegranate h4, .amethyst h4, .wisteria h4, .clouds .silver h4, .wet-asphalt h4, .midnight-blue h4, .concrete h4, .asbestos h4, .turquoise h5, .green-sea h5, .sun-flower h5, .orange h5, .emerald h5, .nephrits h5, .carrot h5, .pumkin h5, .peter-river h5, .belize-hole h5, .alizarin h5, .pomegranate h5, .amethyst h5, .wisteria h5, .clouds .silver h5, .wet-asphalt h5, .midnight-blue h5, .concrete h5, .asbestos h5, .turquoise h6, .green-sea h6, .sun-flower h6, .orange h6, .emerald h6, .nephrits h6, .carrot h6, .pumkin h6, .peter-river h6, .belize-hole h6, .alizarin h6, .pomegranate h6, .amethyst h6, .wisteria h6, .clouds .silver h6, .wet-asphalt h6, .midnight-blue h6, .concrete h6, .asbestos h6 { color: #fff; } .turquoise small, .green-sea small, .sun-flower small, .orange small, .emerald small, .nephrits small, .carrot small, .pumkin small, .peter-river small, .belize-hole small, .alizarin small, .pomegranate small, .amethyst small, .wisteria small, .clouds .silver small, .wet-asphalt small, .midnight-blue small, .concrete small, .asbestos small { color: rgba(255, 255, 255, 0.8); } .turquoise { background-color: #1abc9c; } .green-sea { background-color: #16a085; } .sun-flower { background-color: #f1c40f; } .orange { background-color: #f39c12; } .emerald { background-color:#2ecc71; } .emerald h2 { /*text-shadow: black 2px 2px 4px;*/ } .emerald p { /*text-shadow: black 2px 2px 4px;*/ } .nephritis { background-color: #27ae60; } .carrot { background-color: #e67e22; } .pumkin { background-color: #d35400; } .peter-river { background-color: #3498db; } .belize-hole { background-color: #2980b9; } .alizarin { background-color: #c4c4c4; /*text-shadow: black 2px 2px 4px;*/ } .pomegranate { background-color: #c0392b; } .amethyst { background-color: #9b59b6; } .wisteria { background-color: #8e44ad; } .clouds { background-color: #ecf0f1; } .silver { background-color: #bdc3c7; } .wet-asphalt { background-color: #e1e1e1; } .wet-asphalt a:not(.btn) { color: #bdc3c7; } .wet-asphalt a:not(.btn):hover { color: #d9534f; } .midnight-blue { background-color: #09962d; } .midnight-dabliot { background-color: #3a3a3a; } .concrete { background-color: #95a5a6; } .asbestos { background-color: #7f8c8d; } .embed-container { position: relative; padding-bottom: 56.25%; /* 16/9 ratio */ padding-top: 30px; /* IE6 workaround*/ height: 0; overflow: hidden; } .embed-container iframe, .embed-container object, .embed-container embed { position: absolute; top: 0; left: 0; width: 100%; height: 100%; } #main-slider { position: relative; } #main-slider .carousel h2 { font-size: 36px; } #main-slider .carousel .btn { border: 3px solid rgba(255, 255, 255, 0.5); color: #fff; border-radius: 0; margin-top: 5px; } #main-slider .carousel .btn:hover { background-color: rgba(255, 255, 255, 0.3); } #main-slider .carousel .boxed { padding: 10px 15px; background-color: rgba(0, 0, 0, 0.8); display: inline-block; } #main-slider .carousel .item { background-position: 50%; background-repeat: no-repeat; background-size: cover; left: 0 !important; opacity: 0; top: 0; position: absolute; width: 100%; display: block !important; height: 700px; -webkit-transition: opacity ease-in-out 500ms; -moz-transition: opacity ease-in-out 500ms; -o-transition: opacity ease-in-out 500ms; transition: opacity ease-in-out 500ms; } #main-slider .carousel .item:first-child { top: auto; position: relative; } #main-slider .carousel .item.active { opacity: 1; -webkit-transition: opacity ease-in-out 500ms; -moz-transition: opacity ease-in-out 500ms; -o-transition: opacity ease-in-out 500ms; transition: opacity ease-in-out 500ms; z-index: 1; background-size: 132% auto; } #main-slider .prev, #main-slider .next { position: absolute; top: 50%; background-color: rgba(0, 0, 0, 0.3); color: #fff; display: inline-block; margin-top: -25px; font-size: 24px; height: 50px; width: 50px; line-height: 50px; text-align: center; border-radius: 4px; z-index: 5; } #main-slider .prev:hover, #main-slider .next:hover { background-color: rgba(0, 0, 0, 0.5); border-radius: 10px; } #main-slider .prev { left: 10px; } #main-slider .next { right: 10px; } #main-slider .active .animation.animated-item-1 { -webkit-animation: fadeInUp 300ms linear 300ms both; -moz-animation: fadeInUp 300ms linear 300ms both; -o-animation: fadeInUp 300ms linear 300ms both; -ms-animation: fadeInUp 300ms linear 300ms both; animation: fadeInUp 300ms linear 300ms both; } #main-slider .active .animation.animated-item-2 { -webkit-animation: fadeInUp 300ms linear 600ms both; -moz-animation: fadeInUp 300ms linear 600ms both; -o-animation: fadeInUp 300ms linear 600ms both; -ms-animation: fadeInUp 300ms linear 600ms both; animation: fadeInUp 300ms linear 600ms both; } #main-slider .active .animation.animated-item-3 { -webkit-animation: fadeInUp 300ms linear 900ms both; -moz-animation: fadeInUp 300ms linear 900ms both; -o-animation: fadeInUp 300ms linear 900ms both; -ms-animation: fadeInUp 300ms linear 900ms both; animation: fadeInUp 300ms linear 900ms both; } #main-slider .active .animation.animated-item-4 { -webkit-animation: fadeInUp 300ms linear 1200ms both; -moz-animation: fadeInUp 300ms linear 1200ms both; -o-animation: fadeInUp 300ms linear 1200ms both; -ms-animation: fadeInUp 300ms linear 1200ms both; animation: fadeInUp 300ms linear 1200ms both; } #services .media:hover .icon-md { border-radius: 10px; background-color: rgba(0, 0, 0, 0.8); } #recent-works { padding: 90px 0; } #recent-works .item-inner { position: relative; margin: 0; } .portfolio-items, .portfolio-filter { list-style: none; padding: 0; margin: 0 -20px 20px 0; } .portfolio-filter > li { display: inline-block; } .portfolio-items > li { float: left; padding: 0; -webkit-box-sizing: border-box; -moz-box-sizing: border-box; box-sizing: border-box; } .portfolio-items.col-2 > li { width: 50%; } .portfolio-items.col-3 > li { width: 33%; } .portfolio-items.col-4 > li { width: 25%; } .portfolio-items.col-5 > li { width: 20%; } .portfolio-items.col-6 > li { width: 16%; } /*//////////////////////////////////////////*/ .letra1{ position: relative; bottom:115px; } .letra2{ position: relative; bottom:230px; } .letra4{ position: relative; bottom:335px; } .letra5{ position: relative; bottom:445px; } .letra6{ position: relative; bottom:550px; } .letra7{ position: relative; bottom:655px; } .letra8{ position: relative; bottom:760px; } .letra9{ position: relative; bottom:860px; } .letra10{ position: relative; bottom:965px; } .letra11{ position: relative; bottom:1070px; } .letra12{ position: relative; bottom:1175px; } .letra13{ position: relative; bottom:1280px; } .letra14{ position: relative; bottom:1385px; } .letra15{ position: relative; bottom:1490px; } .portfolio-item { padding: 0; margin: 0; } .portfolio-item .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; } .portfolio-item img { width: 100%; } .portfolio-item h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item:hover .overlay { opacity: 1; } /*//////////////////////////////////////////*/ .portfolio-item1 { padding: 0; margin: 0; } .portfolio-item1 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; } .portfolio-item1 img { width: 100%; } .portfolio-item1 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item1 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item1 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item1:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item2 { padding: 0; margin: 0; } .portfolio-item2 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 115px; } .portfolio-item2 img { width: 100%; } .portfolio-item2 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item2 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item2 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item2:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item3 { padding: 0; margin: 0; } .portfolio-item3 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 225px; } .portfolio-item3 img { width: 100%; } .portfolio-item3 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item3 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item3 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item3:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item4 { padding: 0; margin: 0; } .portfolio-item4 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 330px; } .portfolio-item4 img { width: 100%; } .portfolio-item4 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item4 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item4 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item4:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item5 { padding: 0; margin: 0; } .portfolio-item5 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 440px; } .portfolio-item5 img { width: 100%; } .portfolio-item5 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item5 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item5 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item5:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item6 { padding: 0; margin: 0; } .portfolio-item6 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 545px; } .portfolio-item6 img { width: 100%; } .portfolio-item6 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item6 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item6 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item6:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item7 { padding: 0; margin: 0; } .portfolio-item7 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 650px; } .portfolio-item7 img { width: 100%; } .portfolio-item7 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item7 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item7 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item7:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item8 { padding: 0; margin: 0; } .portfolio-item8 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 750px; } .portfolio-item8 img { width: 100%; } .portfolio-item8 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item8 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item8 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item8:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item9 { padding: 0; margin: 0; } .portfolio-item9 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 855px; } .portfolio-item9 img { width: 100%; } .portfolio-item9 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item9 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item9 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item9:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item10 { padding: 0; margin: 0; } .portfolio-item10 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 960px; } .portfolio-item10 img { width: 100%; } .portfolio-item10 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item10 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item10 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item10:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item11 { padding: 0; margin: 0; } .portfolio-item11 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 1065px; } .portfolio-item11 img { width: 100%; } .portfolio-item11 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item11 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item11 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item11:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item12 { padding: 0; margin: 0; } .portfolio-item12 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 1170px; } .portfolio-item12 img { width: 100%; } .portfolio-item12 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item12 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item12 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item12:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item13 { padding: 0; margin: 0; } .portfolio-item13 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 1275px; } .portfolio-item13 img { width: 100%; } .portfolio-item13 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item13 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item13 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item13:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item14 { padding: 0; margin: 0; } .portfolio-item14 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 1380px; } .portfolio-item14 img { width: 100%; } .portfolio-item14 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item14 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item14 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item14:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /*//////////////////////////////////////////*/ .portfolio-item15 { padding: 0; margin: 0; } .portfolio-item15 .item-inner { background: #fff; border: 1px solid #eee; padding: 10px 10px 0; margin: 0 20px 20px 0; position: relative; bottom: 1485px; } .portfolio-item15 img { width: 100%; } .portfolio-item15 h5 { background: #fff; margin: 0; padding: 10px 0; font-weight: 700; font-size: 14px; color: #2c3e50; white-space: nowrap; text-overflow: ellipsis; overflow: hidden; } .portfolio-item15 .overlay { position: absolute; top: 0; left: 0; width: 100%; height: 100%; opacity: 0; background: rgba(76, 175, 80, 0.39); text-align: center; vertical-align: middle; -webkit-transition: opacity 300ms; -moz-transition: opacity 300ms; -o-transition: opacity 300ms; transition: opacity 300ms; } .portfolio-item15 .overlay .preview { position: relative; top: 50%; display: inline-block; margin-top: -20px; } .portfolio-item15:hover .overlay { opacity: 1; } /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ /*//////////////////////////////////////////*/ /* Start: Recommended Isotope styles */ /**** Isotope Filtering ****/ .isotope-item { z-index: 2; } .isotope-hidden.isotope-item { pointer-events: none; z-index: 1; } /**** Isotope CSS3 transitions ****/ .isotope, .isotope .isotope-item { -webkit-transition-duration: 0.8s; -moz-transition-duration: 0.8s; -ms-transition-duration: 0.8s; -o-transition-duration: 0.8s; transition-duration: 0.8s; } .isotope { -webkit-transition-property: height, width; -moz-transition-property: height, width; -ms-transition-property: height, width; -o-transition-property: height, width; transition-property: height, width; } .isotope .isotope-item { -webkit-transition-property: -webkit-transform, opacity; -moz-transition-property: -moz-transform, opacity; -ms-transition-property: -ms-transform, opacity; -o-transition-property: -o-transform, opacity; transition-property: transform, opacity; } /**** disabling Isotope CSS3 transitions ****/ .isotope.no-transition, .isotope.no-transition .isotope-item, .isotope .isotope-item.no-transition { -webkit-transition-duration: 0s; -moz-transition-duration: 0s; -ms-transition-duration: 0s; -o-transition-duration: 0s; transition-duration: 0s; } /* End: Recommended Isotope styles */ /* disable CSS transitions for containers with infinite scrolling*/ .isotope.infinite-scrolling { -webkit-transition: none; -moz-transition: none; -ms-transition: none; -o-transition: none; transition: none; } #pricing-table .plan { border-radius: 4px; list-style: none; margin: 0 0 20px; background: #3498db; text-align: center; padding: 30px 0; } #pricing-table .plan li { padding: 5px 0; color: #fff; -webkit-transition: 300ms; -moz-transition: 300ms; -o-transition: 300ms; transition: 300ms; } #pricing-table .plan li.plan-name { font-size: 24px; line-height: 24px; color: #fff; } #pricing-table .plan li.plan-name h3 { margin: 0; } #pricing-table .plan li.plan-price { margin-bottom: 10px; } #pricing-table .plan li.plan-price > div { display: inline-block; background-color: rgba(0, 0, 0, 0.2); padding: 10px; font-size: 24px; border-radius: 100%; width: 70px; height: 70px; } #pricing-table .plan li.plan-price > div sup { font-size: 10px; line-height: 10px; } #pricing-table .plan li.plan-price > div > small { display: block; font-size: 11px; } #pricing-table .plan li.plan-action { margin-top: 10px; border-top: 0; } #pricing-table .plan.featured { background-color: #2c3e50; } #title h1 { margin: 0; font-size: 36px; font-weight: 300; } .center { text-align: center; } #meet-the-team .designation { margin-top: 5px; display: block; font-size: 13px; } .img-thumbnail { border: 0; } .progress, .progress .bar { background: #fff; -webkit-box-shadow: none; -moz-box-shadow: none; box-shadow: none; height: 30px; line-height: 30px; } .well { -webkit-box-shadow: none; -moz-box-shadow: none; box-shadow: none; border: 0; } ul.breadcrumb { margin: 20px 0 0; background: transparent; } ul.breadcrumb > li { text-shadow: none; } ul.breadcrumb > li > a, ul.breadcrumb > li .divider { color: #fff; } ul.breadcrumb > li.active { color: rgba(255, 255, 255, 0.7); } ul.tag-cloud { list-style: none; padding: 0; margin: 0; } ul.tag-cloud li { display: inline-block; margin: 0 0 2px 0; } .btn-social { border: 0; color: #fff; border-radius: 100%; display: inline-block; width: 36px; height: 36px; line-height: 36px; text-align: center; padding: 0; } .btn-social.btn-facebook { background: #4f7dd4; } .btn-social.btn-facebook:hover { background: #789bde; } .btn-social.btn-twitter { background: #5bceff; } .btn-social.btn-twitter:hover { background: #8eddff; } .btn-social.btn-linkedin { background: #21a6d8; } .btn-social.btn-linkedin:hover { background: #49b9e3; } .btn-social.btn-google-plus { background: #dc422b; } .btn-social.btn-google-plus:hover { background: #e36957; } .btn-social:hover { color: #fff; } .navbar-inverse { border: none; } .navbar-inverse .navbar-brand { font-family: 'Bubbler One', sans-serif; font-size: 36px; line-height: 50px; color: #fff; } .navbar-inverse .navbar-nav { margin-top: 20px; } .navbar-inverse .navbar-nav > li > a { padding-top: 7px; padding-bottom: 7px; border-radius: 4px; color: #4a4a4a; /*text-shadow: black 1px 1px 1px;*/ } .navbar-inverse .navbar-nav li a :hover{ color: orange; } .navbar-inverse .navbar-nav > .active > a, .navbar-inverse .navbar-nav > .active > a:hover, .navbar-inverse .navbar-nav > .active > a:focus, .navbar-inverse .navbar-nav > .open > a, .navbar-inverse .navbar-nav > .open > a:hover, .navbar-inverse .navbar-nav > .open > a:focus { background-color: none; } .navbar-inverse .navbar-nav .dropdown-menu { background-color: #09962d; -webkit-box-shadow: none; -moz-box-shadow: none; box-shadow: none; border: 0; padding: 0; margin-top: -3px; } .navbar-inverse .navbar-nav .dropdown-menu > li > a { padding: 8px 15px; color: #ffffff; /*text-shadow: black 1px 1px 1px;*/ } .navbar-inverse .navbar-nav .dropdown-menu > li:hover > a, .navbar-inverse .navbar-nav .dropdown-menu > li:focus > a, .navbar-inverse .navbar-nav .dropdown-menu > li.active > a { background-color: #4CAF50; } .navbar-inverse .navbar-nav .dropdown-menu > li:last-child > a { border-radius: 0 0 3px 3px; } .navbar-inverse .navbar-nav .dropdown-menu > li.divider { background-color: rgba(0, 0, 0, 0.1); } .navbar-inverse .navbar-collapse, .navbar-inverse .navbar-form { border-top: 0; } #social-media .icon-facebook { background-color: #3c5899; } #social-media .icon-facebook:hover { background-color: #4e6fba; } #social-media .icon-twitter { background-color: #29c5f6; } #social-media .icon-twitter:hover { background-color: #5ad2f8; } #social-media .icon-google-plus { background-color: #d13d2f; } #social-media .icon-google-plus:hover { background-color: #da6459; } #social-media .icon-pinterest { background-color: #c61118; } #social-media .icon-pinterest:hover { background-color: #ec1e26; } .icon-lg { font-size: 48px; height: 108px; width: 108px; line-height: 108px; color: #fff; margin: 10px; background-color: rgba(0, 0, 0, 0.4); text-align: center; display: inline-block !important; border-radius: 100%; } .icon-md { font-size: 36px; height: 68px; width: 68px; line-height: 68px; color: #fff; margin-right: 10px; background-color: rgba(0, 0, 0, 0.4); text-align: center; display: block; border-radius: 50%; -webkit-transition: 500ms; -moz-transition: 500ms; -o-transition: 500ms; transition: 500ms; } .modal { border: 0; } .modal#loginForm { width: 600px; margin-left: -300px; } .modal .modal-header { border: 0; padding: 20px 20px 0; } .modal .modal-header > h4 { font-weight: 300; font-size: 14px; color: #848484; text-transform: uppercase; margin: 0; } .modal .modal-body { padding: 20px; } .modal input[type="text"], .modal input[type="password"] { padding: 5px 10px; min-height: 30px; width: 130px; margin-right: 10px; } .modal .icon-remove { color: #848484; position: absolute; right: -5px; top: -5px; width: 16px; height: 16px; line-height: 16px; text-align: center; display: block; background: #ebebeb; -webkit-border-radius: 100%; -moz-border-radius: 100%; border-radius: 100%; cursor: pointer; } .modal button { margin-left: 10px; border: 0; } .gap { margin-bottom: 50px; } .big-gap { margin-bottom: 100px; } .no-margin { margin: 0; padding: 0; } .registration-form { border: 0; background-color: #fff; padding: 20px; display: inline-block; } #bottom { color: #bdc3c7; } #bottom h4 { margin-top: 0; margin-bottom: 15px; } #bottom .media-heading { display: block; font-weight: 400; } .row > div { margin-bottom: 10px; } ul.unstyled { list-style: none; padding: 0; margin: 0; } /*Unordered Lists*/ ul.arrow, ul.arrow-double, ul.tick, ul.cross, ul.star, ul.rss { list-style: none; padding: 0; margin: 0; } ul.arrow li::before, ul.arrow-double li::before, ul.tick li::before, ul.cross li::before, ul.star li::before, ul.rss li::before, ul.arrow li::after, ul.arrow-double li::after, ul.tick li::after, ul.cross li::after, ul.star li::after, ul.rss li::after { font-family: FontAwesome; font-size: 11px; } ul.arrow li::before, ul.arrow-double li::before, ul.tick li::before, ul.cross li::before, ul.star li::before, ul.rss li::before { margin-right: 5px; } ul.arrow li::before { content: "\f105"; } ul.arrow-double li::before { content: "\f101"; } ul.tick li::before { content: "\f00c"; } ul.cross li::before { content: "\f00d"; } ul.star li::before { content: "\f006"; } ul.rss li::before { content: "\f09e"; } #footer { padding-top: 30px; padding-bottom: 30px; color: #ffff; text-shadow: black 2px 2px 4px; } #footer a { color: #ffffff; } #footer a:hover { color: #d9534f; } #footer ul { list-style: none; padding: 0; margin: 0; } #footer ul > li { display: inline-block; margin-left: 15px; } ul.social { list-style: none; margin: 10px 0 0; padding: 0; display: inline-block; } ul.social > li { display: inline-block; margin: 0 5px; } ul.social > li > a { font-size: 24px; color: #666; } ul.social > li > a:hover { color: #999; } .box-border { padding: 15px; } .accordion-group { background-color: #fff; border-top: 1px solid #f0f0f0; } .accordion-heading .accordion-toggle { color: #666; font-weight: 700; } .accordion-inner { border-top: 0; } .blog .blog-item { background-color: #fff; border-radius: 5px; margin-bottom: 20px; } .blog .blog-item .img-blog { width: 100%; border-radius: 5px 5px 0 0; } .blog .blog-item .blog-content { padding: 20px; } .blog .blog-item h3 { margin-top: 0; } .blog .blog-item .entry-meta { margin-bottom: 20px; } .blog .blog-item .entry-meta > span { display: inline-block; color: #999; margin-right: 10px; font-size: 12px; } .blog .blog-item .entry-meta > span a { color: #999; } ul.pagination > li > a { border: 0; } ul.pagination > li.active > a, ul.pagination > li:hover > a { background-color: #34495e; color: #fff; } textarea#message { padding: 10px 15px; height: 219px; } .widget { margin-bottom: 30px; } ul.gallery { list-style: none; padding: 0; margin: 0; } ul.gallery li { display: block; width: 60px; padding: 0; margin: 0 4px 4px 0; float: left; } ul.faq { list-style: none; margin: 0; } ul.faq li { margin-top: 30px; } ul.faq li:first-child { margin-top: 0; } ul.faq li span.number { display: block; float: left; width: 50px; height: 50px; line-height: 50px; text-align: center; background: #34495e; color: #fff; font-size: 24px; } ul.faq li > div { margin-left: 70px; } ul.faq li > div h3 { margin-top: 0; } #error { text-align: center; margin-top: 150px; margin-bottom: 150px; } .linkedin-ico img { position: relative; float: right; left: 925px; width: 30px; height: 30px; margin-top: 7%; } .facebook-ico img { position: relative; float: right; left: 925px; width: 30px; height: 30px; margin-top: 7%; } .youtube-ico img { position: relative; float: right; left: 928px; width: 30px; height: 30px; margin-top: 7%; } .linkedin-bot { width: 40px; height: 40px; } .facebook-bot { width: 40px; height: 40px; } .facebook-bot { width: 40px; height: 40px; } .youtube-bot { width: 40px; height: 40px; } <!DOCTYPE html> <html lang="PT"> <head> <meta charset="utf-8"> <meta name="viewport" content="width=device-width, initial-scale=1.0"> <meta name="description" content=""> <meta name="author" content=""> <title>MSA Engenharia Eletromecânica - Uma empresa 100% Brasileira</title> <link href="css/bootstrap.min.css" rel="stylesheet"> <link href="css/font-awesome.min.css" rel="stylesheet"> <link href="css/prettyPhoto.css" rel="stylesheet"> <link href="css/animate.css" rel="stylesheet"> <link href="css/main.css" rel="stylesheet"> <!--[if lt IE 9]> <script src="js/html5shiv.js"></script> <script src="js/respond.min.js"></script> <![endif]--> <link rel="shortcut icon" href="images/ico/favicon.ico"> <link rel="icon" href="images/ico/iconMSA.png"> <style> .linkedin-ico img { position: relative; float: right; left: 925px; width: 30px; height: 30px; margin-top: 7%; } .facebook-ico img { position: relative; float: right; left: 925px; width: 30px; height: 30px; margin-top: 7%; } .youtube-ico img { position: relative; float: right; left: 928px; width: 30px; height: 30px; margin-top: 7%; } .linkedin-bot { width: 40px; height: 40px; } .facebook-bot { width: 40px; height: 40px; } .facebook-bot { width: 40px; height: 40px; } .youtube-bot { width: 40px; height: 40px; } .quadro1{float: left;} .quadro2{float: left;} </style> </head><!--/head--> <body id="home" class="corpo"> <header class="navbar navbar-inverse navbar-fixed-top wet-asphalt" role="banner"> <div class="container"> <div class="navbar-header"> <button type="button" class="navbar-toggle" data-toggle="collapse" data-target=".navbar-collapse"> <span class="sr-only">Toggle navigation</span> <span class="icon-bar"></span> <span class="icon-bar"></span> <span class="icon-bar"></span> </button> <a target="_blank" class="linkedin-ico" href="https://www.linkedin.com/company/msa-engenharia-eletromecanica/"><img src="images/linkedin-ico.png"></a> <a target="_blank" class="facebook-ico" href="https://www.facebook.com/marketing.msa/?view_public_for=840474242968482"><img src="images/facebook-ico.png"></a> <a target="_blank" class="youtube-ico" href="https://www.youtube.com/channel/UCU8eK8-TQEkcTrNceDXtxpQ"><img src="images/youtube-ico.png"></a> <a class="navbar-brand" href="index.html"><img src="images/logo.png" alt="logo"></a> </div> <div class="collapse navbar-collapse"> <ul class="nav navbar-nav navbar-right"> <li><a href="index.html#home"><i class="icon-home"></i> HOME</a></li> <li><a href="index.html#empresa"><i class="icon-briefcase"></i> EMPRESA</a></li> <li class="dropdown"> <a href="#" class="dropdown-toggle" data-toggle="dropdown"><i class="icon-wrench"></i> SERVIÇOS<i class="icon-angle-down"></i></a> <ul class="dropdown-menu"> <li><a href="Montagens-Industriais.html">MONTAGENS INDUSTRIAIS</a></li> <li><a href="Engenharia.html">ENGENHARIA</a></li> <li><a href="NR-12-segurança-em-Maquinas-e-Equipamentos.html">NR-12 SEGURANÇA EM MÁQUINAS E EQUIPAMENTOS</a></li> <li><a href="incendio.html">SISTEMAS DE COMBATE DE COMBATE A INCÊNDIO</a></li> <li><a href="SPDA-e-NR10.html">SPDA E NR10</a></li> </ul> </li> <li class="dropdown"> <a href="#" class="dropdown-toggle" data-toggle="dropdown"><i class="icon-cogs"></i> PRODUTOS<i class="icon-angle-down"></i></a> <ul class="dropdown-menu"> <li><a href="Esmeril.html">ESMERIL</a></li> <li><a href="Furadeira.html">FURADEIRA</a></li> <li><a href="Portas.html">PORTAS DE EMERGÊNCIA</a></li> </ul> </li> <li><a href="index.html#clientes"><i class="icon-group"></i> CLIENTES</a></li> <li><a href="index.html#testimonial"><i class="icon-phone"></i> FALE CONOSCO</a></li> </ul> </div> </div> </header><!--/header--> <section id="title" class="emerald"> <div class="container"> <div class="row"> <div class="col-sm-6"> <h1>Montagens Industriais</h1> </div> </div> </div> </section> <section id="privacy-policy" class="container"> <h5><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item1 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra1"><b>Sistemas de iluminação (iluminação de ambientes, de emergência, balizamento e etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item2 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra2"><b>Montagem e comissionamento de subestações de média tensão</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item3 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra4"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item4 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra5"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item5 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra6"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item6 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra7"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item7 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra8"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item8 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra9"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item9 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra10"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item10 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra11"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item11 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra12"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item12 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra13"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item13 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra14"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item14 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <section id="privacy-policy" class="container"> <h5 class="letra15"><b>Pinturas em geral (máquinas e equipamentos, pisos, estruturas, paredes, tubulações, etc)</b></h5> <!--/.portfolio-item--> <ul class="portfolio-items col-3"> <li class="portfolio-item15 apps"> <div class="item-inner"> <img src="images/portfolio/mon1.jpg" alt=""></div> </li><!--/.portfolio-item--> </section> <!--------------------------------------------------------------------------------------------------> <footer id="footer" class="midnight-blue"> <div class="container"> <div class="row"> <div class="col-sm-6"> <b> © 2015 MSA Engenharia Eletromecânica | Todos os Direitos Reservados.</b> </div> <div class="col-sm-6"> <ul class="pull-right"> <li><a target="_blank" href="https://www.linkedin.com/company/msa-engenharia-eletromecanica/"><img class="linkedin-bot" src="images/linkedin-ico.png"></a></li> <li><a target="_blank" href="https://www.facebook.com/marketing.msa/?view_public_for=840474242968482"><img class="facebook-bot" src="images/facebook-ico.png"></a></li> <li><a target="_blank" href="https://www.youtube.com/channel/UCU8eK8-TQEkcTrNceDXtxpQ"><img class="youtube-bot" src="images/youtube-ico.png"></a></li> <!--#gototop--> </ul> </div> </div> </div> </footer> <!--/#footer--><!--/#footer--> <script src="js/jquery.js"></script> <script src="js/bootstrap.min.js"></script> <script src="js/jquery.prettyPhoto.js"></script> <script src="js/main.js"></script> </body> </html> Pessoal estou arrumando um site da minha empresa, eu peguei um código fonte dele e venho ajustando já faz um tempo, entre tanto cheguei em um problema, já que o código não foi desenvolvido por mim, isso acaba dificultando, o problema que venho enfrentando é o seguinte, eu ajustei uma lista de imagem, ficou do jeito que eu queria entre tanto o rodapé está muito abaixo do que eu esperava, tentei procurar no código para resolver e não achei, já tentei pelo body, footer etc.. veja a imagem e o código abaixo. Desktop.rar

-
Fonte de corrente 500A
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Eletrônica
Amigos eu sei que é assustador, mas isso é para uma bancada industrial onde eu trabalho, a gente tem uma bancada antiga e eu resolvi reformar e construir uma outra nova, já que as anteriores é um dinossauro e já esta no bico do corvo, o mais complicado de achar foi os SCRs para tensão de 2kV, já para fonte de corrente estava pensando fazer ela controlada também em SCR, elas serão controlada por microcontrolador PIC18F4550, vou mandar enrolar os trafos, as fontes serão separadas, e a tensão que eu tenho na rede é de 220,380 e 440V. Já comecei a fazer o projeto, vou fazer um protótipo e vou postando aqui no fórum, sendo assim, eu aprendo e também poderei ajudar quem for fazer algo parecido. Veja abaixo a bancada que a gente tem, porém, essa é a melhor no momento.
-
Olá pessoal, tudo bem? Alguém poderia me ajudar, onde eu posso comprar um tiristor 2kv. E se alguém pudesse me dar uma dica de literatura ou artigo, eu estou tentando fazer uma fonte de corrente alternada ajustável de 0 A 500A .
-
TV hd 32 para jogar no pc
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Monitores de vídeo
O problema e que essa TV também será usada para assistir, se for pegar um de 32 HD caso não fique bom a imagem opto para uma de 42 FULL HD -
TV hd 32 para jogar no pc
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Monitores de vídeo
Na sua opinião, para jogar fica muito ruim uma tela dessa HD ? -
Pessoal gostaria de saber a suas opiniões , se uma TV 32 HD e aceitável para jogar no PC, eu ate queria comprar uma FULL HD mais não acha mais no mercado. o modelo e a LG 32LJ500B HD ou Samsung 32J4300 HD. E para jogar no MEU PC e assistir filmes.
-
PIC calcular defasagem de sinal no pic18f4550
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Microcontroladores
No fim consegui fazer a leitura do sinal, utilizei o modo ccp em borda de subida de borda de descida, sendo assim o timer1 armazena o tempo do pulso na interrupção do modulo ccp, veja: void interrupt() { //BORDA DE DESCIDA if(CCP1IF_bit == 1 && CCP1M0_bit == 1 && CCP1M1_bit == 0 && CCP1M2_bit == 1 && CCP1M3_bit == 0) { CCP1IF_bit = 0; // LIMPAR FLAG DE INTERRUPCÃO CCP1IE_bit = 0; // DESABILITAR INTERRUPCÃO CCP1M0_bit = 0; // CCP MODO DE EM BORDA DE DESCIDA CCP1M1_bit = 0; CCP1M2_bit = 1; CCP1M3_bit = 0; CCP1IE_bit = 1; // HABILITAR INTERRUPCÃO TMR1H = 0x00; TMR1L = 0x00; TMR1ON_bit = 1; // LIGAR O TIMER1 } //BORDA DE SUBIDA else if(CCP1IF_bit == 1 && CCP1M0_bit == 0 && CCP1M1_bit == 0 && CCP1M2_bit == 1 && CCP1M3_bit == 0) { CCP1IF_bit = 0; // LIMPAR FLAG DE INTERRUPCÃO TMR1ON_bit = 0; // TIMER1 DESLIGADO CCP1IE_bit = 0; // DESABILITA INTERRUPCÃO CCP1M0_bit = 1; // CCP MODO DE EM BORDA DE SUBIDA CCP1M1_bit = 0; CCP1M2_bit = 1; CCP1M3_bit = 0; CCP1IE_bit = 1; // HABILITA INTERRUPCÃO tempo_H = CCPR1H; tempo_L = CCPR1L; }
-
PIC calcular defasagem de sinal no pic18f4550
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Microcontroladores
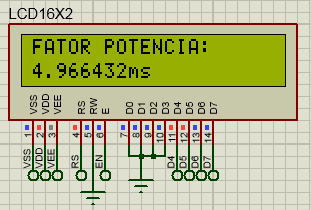
Eu fiz o que você falou, me parece que ele fica preso no while(sinal_tensao && sinal_corrente == 1), mas e muito esquisito, isso não deveria ocorrer, sendo assim, resolvi fazer o projeto em outro compilador e o erro persistiu, então resolvi ao invés de usar duas entrada no uC, utilizei uma porta and para pegar os dois sinal de entrada e mandar apnes um sinal de saída para eu poder calcular o tempo sem a necessidade do uC comparar dois sinal, e o mesmo problema persistiu, sendo assim, só Jesus na causa. Veja o código feito no mikroC e a nova implementação . // LCD module connections sbit LCD_RS at RE0_bit; sbit LCD_EN at RE1_bit; sbit LCD_D4 at RD4_bit; sbit LCD_D5 at RD5_bit; sbit LCD_D6 at RD6_bit; sbit LCD_D7 at RD7_bit; sbit LCD_RS_Direction at TRISE0_bit; sbit LCD_EN_Direction at TRISE1_bit; sbit LCD_D4_Direction at TRISD4_bit; sbit LCD_D5_Direction at TRISD5_bit; sbit LCD_D6_Direction at TRISD6_bit; sbit LCD_D7_Direction at TRISD7_bit; // End LCD module connections #define SINC RA0_bit #define LED_TEST RE2_bit void pic_start(); float timer0_carga(); float tempo; float numero[13]; int i; void main() { pic_start(); Lcd_Out(1,1,"FATOR POTENCIA"); //ESCREVE NO LCD PRIMEIRA LINHA while(1) { while(SINC == 1) { TMR0ON_bit = 1; } tempo = timer0_carga(); FloatToStr(tempo,numero); lcd_out(2,1,numero); } } void pic_start() { TRISD = 0x00; // TODOS PORTD COMO SAIDA Lcd_Init(); // Initialize LCD Lcd_Cmd(_LCD_CLEAR); // Clear display Lcd_Cmd(_LCD_CURSOR_OFF); // Cursor off TRISE2_bit = 0; //TODOS PORTE COMO SAIDA, EXCETO MCLR PARA O RESET RE2_bit = 0; //PORTE EM ZERO TRISA0_bit = 1; //PORT RA0 COMO ENTRADA TRISA1_bit = 1; //PORT RA1 COMO ENTRADA PCFG0_bit = 1; //ALL PORTS DIGITAL PCFG1_bit = 1; //ALL PORTS DIGITAL PCFG2_bit = 1; //ALL PORTS DIGITAL PCFG3_bit = 1; //ALL PORTS DIGITAL GIE_bit = 0; // DESABILITA TODAS INTERRUPCOES MASCARADAS GIEH_bit = 0; // DESABILITA TODAS INTERRUPCOES DE ALTA PRIORIDADE PEIE_bit = 0; // DESABILITA TODAS INTERRUPCOES PERIFERICAS GIEL_bit = 0; // DESABILITA TODAS INTERRUPCOES DE BAIXA PRIORIDADE TMR0IE_bit = 0; // BIT DE OVERFLOW DO TIMER0 DESLIGADO TMR0IF_bit = 0; // BIT TIMER0 LIMPO TMR0ON_bit = 0; // TIMER0 DESLIGADO T08BIT_bit = 1; // TIMER0 CONFIGURADO COMO 8BIT T0CS_bit = 0; // TIMER0 CONFIGURADO COMO TEMPORIZADOR PSA_bit = 0; // O PRESCALER FOI ASSOCIADO AO TIMER0 T0PS0_bit = 1; // PRESCALER DO TIMER 1:256 T0PS1_bit = 1; T0PS2_bit = 1; TMR0L = 0x00; // CARGA DO TIMER0 EM ZERO } float timer0_carga() { float result; TMR0ON_bit = 0; // TIMER0 DESLIGADO TMR0IF_bit = 0; result = TMR0L; result = result*13.1072; result = result/256.0; TMR0L = 0x00; return result; }
-
PIC calcular defasagem de sinal no pic18f4550
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Microcontroladores
Eu tentei usar essa lógica veja: while(!SINAL_CORRENTE) { T0CONbits.TMR0ON = 1; } while(!SINAL_TENSAO) { T0CONbits.TMR0ON = 0; } w = timer0_carga(); // DESLIGA O TIMER0 E FAZ A CONTA PARA MS Mesmo assim não deu certo, ele ate mostra no lcd o tempo, ma não importa a defasagem dos pulso o tempo sempre e o mesmo, e em relação ao prescaler, eu já tinha usado veja lá na prototipo timer0_config(); veja: t0conbits.t0ps0 = 1; // prescaler do timer 1:256 t0conbits.t0ps1 = 1; t0conbits.t0ps2 = 1; No meu caso, meu timer0 faz contagem ate 13ms já que o pulso que quero medir e no máximo 8.3ms já e o suficiente. -
PIC calcular defasagem de sinal no pic18f4550
Lucas Pereira de Souza respondeu ao tópico de Lucas Pereira de Souza em Microcontroladores
#include #include #include #include #include /*observacão: o port do lcd e configurado no portd como os pinos de dados,(d4 a d7 no pino d4 a d7 do uc, e os pinos de comando esta localizado porte, rs no port re0 e pino en no port re1 */ /*escreve segunda linha comando_lcd(0xc0);, escreve primeira linha linha comando_lcd(0x80); printf("lucas %f",v); recebe tipo de variavel e imprime no lcd*/ //%u valor inteiro // pic18f4550 configuration bit settings // config1l #pragma config plldiv = 1 // pll prescaler selection bits (no prescale (4 mhz oscillator input drives pll directly)) // config1h #pragma config fosc = hs // oscillator selection bits (hs oscillator (hs)) // config2l #pragma config pwrt = on // power-up timer enable bit (pwrt enabled) // config2h #pragma config wdt = off // watchdog timer enable bit (wdt disabled (control is placed on the swdten bit)) // config3h #pragma config pbaden = off // portb a/d enable bit (portb pins are configured as analog input channels on reset) #pragma config mclre = on // mclr pin enable bit (mclr pin enabled; re3 input pin disabled) // config4l #pragma config lvp = off // single-supply icsp enable bit (single-supply icsp enabled) // config6h #pragma config wrtc = off // configuration register write protection bit (configuration registers (300000-3000ffh) are not write-protected) #pragma config wrtb = off // boot block write protection bit (boot block (000000-0007ffh) is not write-protected) #pragma config wrtd = off // data eeprom write protection bit (data eeprom is not write-protected) //defiines #define _xtal_freq 20000000 #define led_test portebits.re2 #define sinal_tensao portabits.ra1 #define sinal_corrente portabits.ra1 //end define //prototipos funcoes void pic_start(); void lcd_iniciar(); //prototipo para iniciar lcd void comando_lcd(char comandos); //prototipo para comando do lcd void lcd_dado(char dados); //prototipo para dados do lcd void putch(char escrita); //prototipo padrão c para criar mais de um caracter no lcd void timer0_config(); float timer0_carga(); //end prot void interrupt my_isr_high(void) // interrupção de alta prioridade { } void interrupt low_priority my_isr_low(void) // interrupção de baixa prioridade { } void main() { pic_start(); // inicia config do pic lcd_iniciar(); // inicia lcd timer0_config(); // inicia config do timer0 float x = 0; // variavel global printf("fator potencia:"); //escreve no lcd while(1) { while(sinal_tensao && sinal_corrente == 1) { t0conbits.tmr0on = 1; // timer0 ligado } x = timer0_carga(); // desliga o timer0 e faz a conta para ms comando_lcd(0xc0); printf("%fms",x); } } void lcd_iniciar() { /////////////////////////////////////////////////////////////////////////// //config inicial trisd = 0x00; //todos portd como saida /////////////////////////////////////////////////////////////////////////// //inicializacão __delay_ms(15); //aguarda 15ms para inicar o lcd comando_lcd(0x30); __delay_ms(5); //aguarda 5ms comando_lcd(0x30); __delay_us(100); //aguarda 100us comando_lcd(0x30); __delay_us(40); //aguarda 40us comando_lcd(0x30); __delay_ms(5); //aguarda 5ms comando_lcd(0x30); __delay_us(100); //aguarda 100us comando_lcd(0x30); __delay_us(40); //aguarda 40us comando_lcd(0x30); __delay_ms(5); //aguarda 5ms comando_lcd(0x30); __delay_us(100); //aguarda 100us comando_lcd(0x30); __delay_us(40); //aguarda 40us //modo de configuração em 4bits comando_lcd(0x02); //iniciliza em modo 4bits __delay_us(40); //aguarda 40us comando_lcd(0x28); //iniciliza em modo 4bits duas linhas __delay_us(40); //aguarda 40us comando_lcd(0x01); //limpa o lcd __delay_ms(2); //aguarda 2ms comando_lcd(0x0c); //liga o lcd sem o cursor __delay_us(40); //aguarda 40us comando_lcd(0x06); //deslocamento para direita __delay_us(40); //aguarda 40us /////////////////////////////////////////////////////////////////////////// } void comando_lcd(char comandos) { portebits.re0 = 0; //habilita lcd para comando, pino rs __delay_us(100); //aguarda 100us portd = (comandos & 0b11110000); //portd envia o comando para lcd, nible mais significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us portd = (comandos 4)& 0b11110000; //portd envia o comando para lcd, nible menos significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us } void lcd_dado(char dados) { portebits.re0 = 1; //habilita lcd para dados, pino rs __delay_us(100); //aguarda 100us portd = (dados & 0b11110000); //portd envia o caracter para lcd, nible mais significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us portd = (dados 4)& 0b11110000; //portd envia o caracter para lcd, nible menos significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us } void putch(char escrita) { lcd_dado(escrita); } void pic_start() { trisebits.trise0 = 0; //todos porte como saida, exceto mclr para o reset trisebits.trise1 = 0; //todos porte como saida, exceto mclr para o reset trisebits.trise2 = 0; //todos porte como saida, exceto mclr para o reset portebits.re0 = 0; //porte em zero portebits.re1 = 0; //porte em zero portebits.re2 = 0; //porte em zero trisabits.trisa1 = 1; //ra1 como entrada trisabits.trisa2 = 1; //ra2 como entrada portabits.ra1 = 0; //porta em zero portabits.ra1 = 0; //porta em zero adcon1bits.pcfg0 = 1; //configurando todas portas do uc como digitais adcon1bits.pcfg1 = 1; //configurando todas portas do uc como digitais adcon1bits.pcfg2 = 1; //configurando todas portas do uc como digitais adcon1bits.pcfg3 = 1; //configurando todas portas do uc como digitais } void timer0_config() { intconbits.gie = 0; // desabilita todas interrupcoes mascaradas intconbits.gieh = 0; // desabilita todas interrupcoes de alta prioridade intconbits.peie = 0; // desabilita todas interrupcoes perifericas intconbits.giel = 0; // desabilita todas interrupcoes de baixa prioridade intconbits.tmr0ie = 0; // bit de overflow do timer0 desligado intconbits.tmr0if = 0; // bit timer0 limpo //registrador t0con t0conbits.tmr0on = 0; // timer0 desligado t0conbits.t08bit = 1; // timer0 configurado como 8bit t0conbits.t0cs = 0; // timer0 configurado como temporizador t0conbits.psa = 0; // o prescaler foi associado ao timer0 t0conbits.t0ps0 = 1; // prescaler do timer 1:256 t0conbits.t0ps1 = 1; t0conbits.t0ps2 = 1; // carga do timer0 tmr0l = 0x00; } float timer0_carga() { float result; t0conbits.tmr0on = 0; // timer0 desligado intconbits.tmr0if = 0; // limpa flag do timer0 result = tmr0l; // absorve a carga do timer0 na variavel result result = result*13.1072; // conversão do resultado do timer0 para milisegundos para crystal 20mhz 13ms result = result/256.0; // conversão do resultado do timer0 para milisegundos para crystal 20mhz 13ms tmr0l = 0x00; // limpa a carga do timer0 return result; } -
PIC calcular defasagem de sinal no pic18f4550
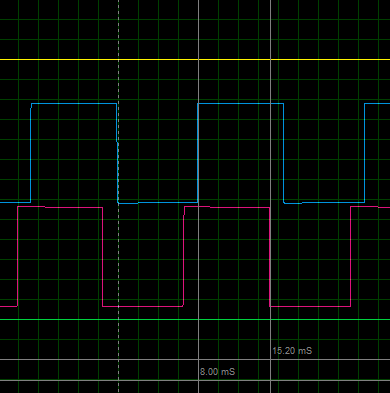
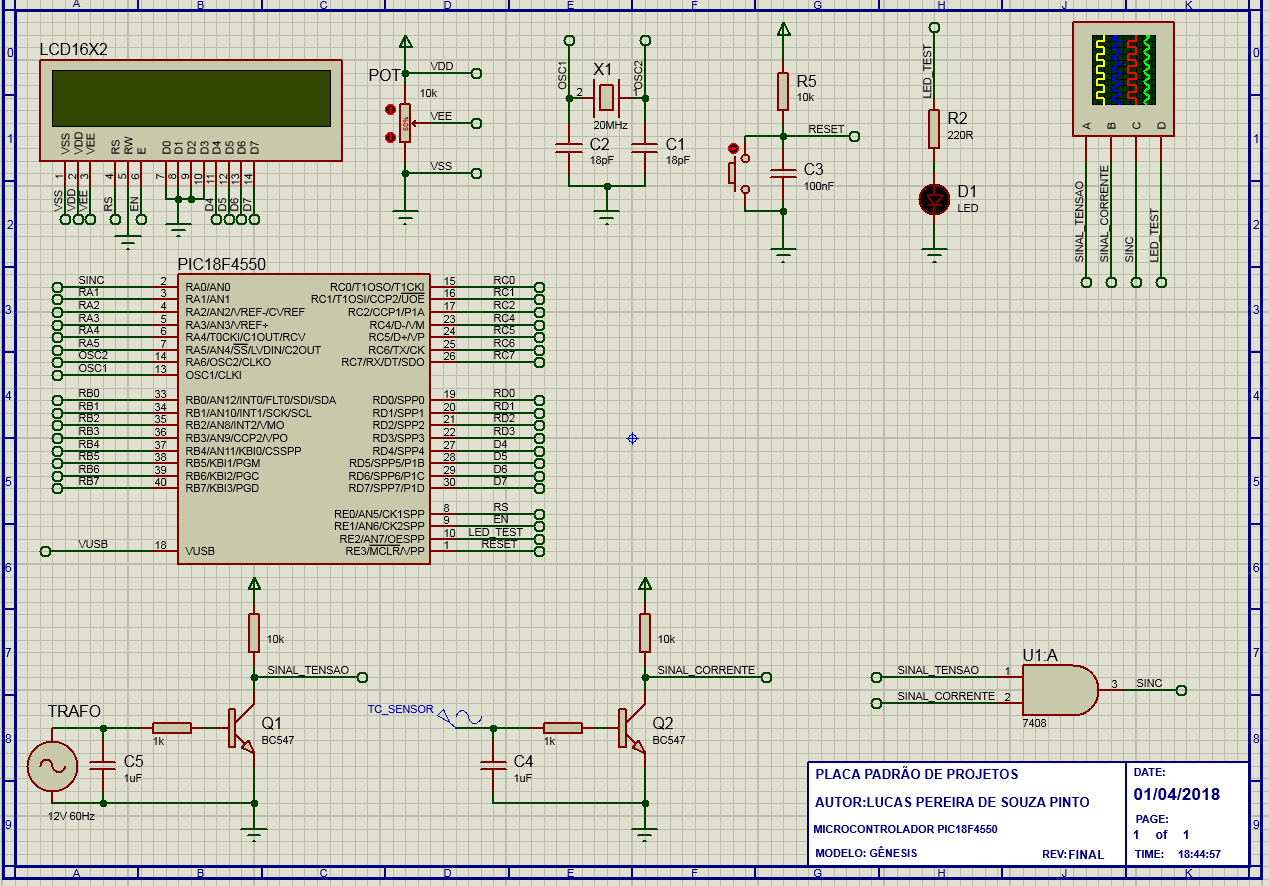
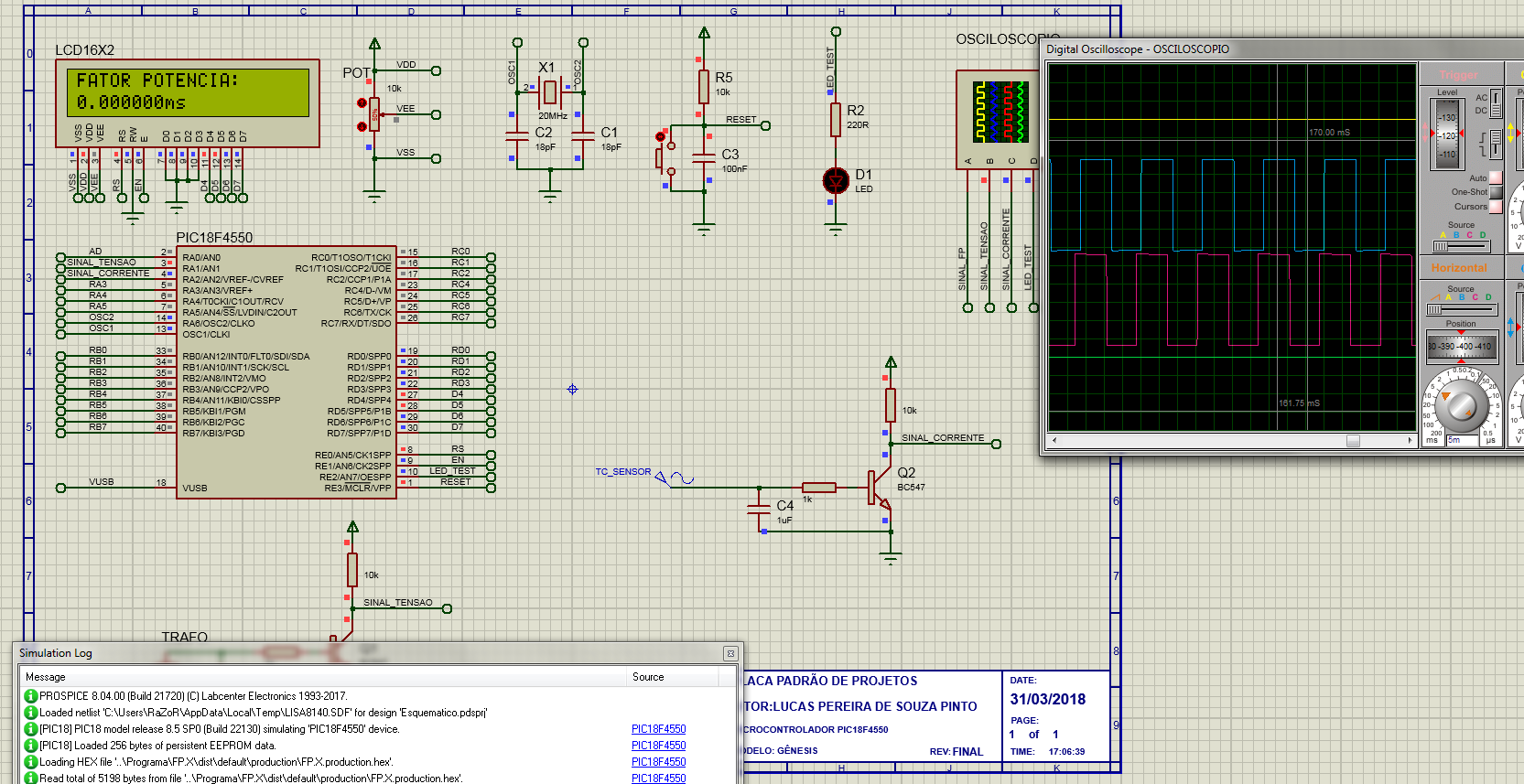
Lucas Pereira de Souza postou um tópico em Microcontroladores
Tudo bem pessoal, atualmente estou trabalhando em um projetinho, onde você pode calcular o tempo de defasagem de dois sinal, eu implementei o timer0 como um temporizador para armazenar um tempo de um determinado evento, exemplo, quando o pino ra1 e ra2 do pic ficar em 1 o timer0 dispara e a contagem do evento ocorre em mili segundos, e quando um desses pulso sair dessa condição eu saberei o tempo de defasagem, sendo assim, eu posso calcular o ângulo entre a corrente e a tensão por exemplo, inclusive eu fiz a conta na mão e dava certo, sendo assim, para confirmar se o timer0 que configurei estava certo eu fiz o seguinte teste: código para provar que o timer0 zero estava funcionando corretamente. t0conbits.tmr0on = 1; // timer0 ligado __delay_ms(5); // delay para confirmar se o timer esta correto x = timer0_carga(); // rotina de armazenamento de tempo comando_lcd(0xc0); // escrever na segunda linha do lcd printf("%f ms",x); // escrever a variavel x ate ai tudo bem, consegui realizar esse procedimento, depois desse processo eu fiz a seguinte implementação, eu resolvi medir os dois sinal que entra no pic e contar esses pulso de entrada, que no caso seria dois pulso defasados em 30 graus, veja: nesse caso seria aproximadamente 15.20 - 8 = 7,2ms, ate ai tudo bem então resolvi colocar isso em pratica, eu implementei a seguinte lógica. while(sinal_tensao && sinal_corrente == 1) { t0conbits.tmr0on = 1; // timer0 ligado } x = timer0_carga(); // desliga o timer0 e faz a conta para ms comando_lcd(0xc0); printf("%fms",x); e para minha surpresa o microcontrolador não fez a contagem correta, e isso que me preocupa. veja: agora vou postar o código completo para vocês analisarem, desculpe algumas palavras não ter acento, meu teclado e padrão inglês . #include #include #include #include #include /*observacão: o port do lcd e configurado no portd como os pinos de dados,(d4 a d7 no pino d4 a d7 do uc, e os pinos de comando esta localizado porte, rs no port re0 e pino en no port re1 */ /*escreve segunda linha comando_lcd(0xc0);, escreve primeira linha linha comando_lcd(0x80); printf("lucas %f",v); recebe tipo de variavel e imprime no lcd*/ //%u valor inteiro // pic18f4550 configuration bit settings // config1l #pragma config plldiv = 1 // pll prescaler selection bits (no prescale (4 mhz oscillator input drives pll directly)) // config1h #pragma config fosc = hs // oscillator selection bits (hs oscillator (hs)) // config2l #pragma config pwrt = on // power-up timer enable bit (pwrt enabled) // config2h #pragma config wdt = off // watchdog timer enable bit (wdt disabled (control is placed on the swdten bit)) // config3h #pragma config pbaden = off // portb a/d enable bit (portb<4:0> pins are configured as analog input channels on reset) #pragma config mclre = on // mclr pin enable bit (mclr pin enabled; re3 input pin disabled) // config4l #pragma config lvp = off // single-supply icsp enable bit (single-supply icsp enabled) // config6h #pragma config wrtc = off // configuration register write protection bit (configuration registers (300000-3000ffh) are not write-protected) #pragma config wrtb = off // boot block write protection bit (boot block (000000-0007ffh) is not write-protected) #pragma config wrtd = off // data eeprom write protection bit (data eeprom is not write-protected) //defiines #define _xtal_freq 20000000 #define led_test portebits.re2 #define sinal_tensao portabits.ra1 #define sinal_corrente portabits.ra1 //end define //prototipos funcoes void pic_start(); void lcd_iniciar(); //prototipo para iniciar lcd void comando_lcd(char comandos); //prototipo para comando do lcd void lcd_dado(char dados); //prototipo para dados do lcd void putch(char escrita); //prototipo padrão c para criar mais de um caracter no lcd void timer0_config(); float timer0_carga(); //end prot void interrupt my_isr_high(void) // interrupção de alta prioridade { } void interrupt low_priority my_isr_low(void) // interrupção de baixa prioridade { } void main() { pic_start(); // inicia config do pic lcd_iniciar(); // inicia lcd timer0_config(); // inicia config do timer0 float x = 0; // variavel global printf("fator potencia:"); //escreve no lcd while(1) { while(sinal_tensao && sinal_corrente == 1) { t0conbits.tmr0on = 1; // timer0 ligado } x = timer0_carga(); // desliga o timer0 e faz a conta para ms comando_lcd(0xc0); printf("%fms",x); } } void lcd_iniciar() { /////////////////////////////////////////////////////////////////////////// //config inicial trisd = 0x00; //todos portd como saida /////////////////////////////////////////////////////////////////////////// //inicializacão __delay_ms(15); //aguarda 15ms para inicar o lcd comando_lcd(0x30); __delay_ms(5); //aguarda 5ms comando_lcd(0x30); __delay_us(100); //aguarda 100us comando_lcd(0x30); __delay_us(40); //aguarda 40us comando_lcd(0x30); __delay_ms(5); //aguarda 5ms comando_lcd(0x30); __delay_us(100); //aguarda 100us comando_lcd(0x30); __delay_us(40); //aguarda 40us comando_lcd(0x30); __delay_ms(5); //aguarda 5ms comando_lcd(0x30); __delay_us(100); //aguarda 100us comando_lcd(0x30); __delay_us(40); //aguarda 40us //modo de configuração em 4bits comando_lcd(0x02); //iniciliza em modo 4bits __delay_us(40); //aguarda 40us comando_lcd(0x28); //iniciliza em modo 4bits duas linhas __delay_us(40); //aguarda 40us comando_lcd(0x01); //limpa o lcd __delay_ms(2); //aguarda 2ms comando_lcd(0x0c); //liga o lcd sem o cursor __delay_us(40); //aguarda 40us comando_lcd(0x06); //deslocamento para direita __delay_us(40); //aguarda 40us /////////////////////////////////////////////////////////////////////////// } void comando_lcd(char comandos) { portebits.re0 = 0; //habilita lcd para comando, pino rs __delay_us(100); //aguarda 100us portd = (comandos & 0b11110000); //portd envia o comando para lcd, nible mais significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us portd = (comandos << 4)& 0b11110000; //portd envia o comando para lcd, nible menos significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us } void lcd_dado(char dados) { portebits.re0 = 1; //habilita lcd para dados, pino rs __delay_us(100); //aguarda 100us portd = (dados & 0b11110000); //portd envia o caracter para lcd, nible mais significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us portd = (dados << 4)& 0b11110000; //portd envia o caracter para lcd, nible menos significativo portebits.re1 = 1; //habilita pino enable portebits.re1 = 0; //desabilita pino enable __delay_us(100); //aguarda 100us } void putch(char escrita) { lcd_dado(escrita); } void pic_start() { trisebits.trise0 = 0; //todos porte como saida, exceto mclr para o reset trisebits.trise1 = 0; //todos porte como saida, exceto mclr para o reset trisebits.trise2 = 0; //todos porte como saida, exceto mclr para o reset portebits.re0 = 0; //porte em zero portebits.re1 = 0; //porte em zero portebits.re2 = 0; //porte em zero trisabits.trisa1 = 1; //ra1 como entrada trisabits.trisa2 = 1; //ra2 como entrada portabits.ra1 = 0; //porta em zero portabits.ra1 = 0; //porta em zero adcon1bits.pcfg0 = 1; //configurando todas portas do uc como digitais adcon1bits.pcfg1 = 1; //configurando todas portas do uc como digitais adcon1bits.pcfg2 = 1; //configurando todas portas do uc como digitais adcon1bits.pcfg3 = 1; //configurando todas portas do uc como digitais } void timer0_config() { intconbits.gie = 0; // desabilita todas interrupcoes mascaradas intconbits.gieh = 0; // desabilita todas interrupcoes de alta prioridade intconbits.peie = 0; // desabilita todas interrupcoes perifericas intconbits.giel = 0; // desabilita todas interrupcoes de baixa prioridade intconbits.tmr0ie = 0; // bit de overflow do timer0 desligado intconbits.tmr0if = 0; // bit timer0 limpo //registrador t0con t0conbits.tmr0on = 0; // timer0 desligado t0conbits.t08bit = 1; // timer0 configurado como 8bit t0conbits.t0cs = 0; // timer0 configurado como temporizador t0conbits.psa = 0; // o prescaler foi associado ao timer0 t0conbits.t0ps0 = 1; // prescaler do timer 1:256 t0conbits.t0ps1 = 1; t0conbits.t0ps2 = 1; // carga do timer0 tmr0l = 0x00; } float timer0_carga() { float result; t0conbits.tmr0on = 0; // timer0 desligado intconbits.tmr0if = 0; // limpa flag do timer0 result = tmr0l; // absorve a carga do timer0 na variavel result result = result*13.1072; // conversão do resultado do timer0 para milisegundos para crystal 20mhz 13ms result = result/256.0; // conversão do resultado do timer0 para milisegundos para crystal 20mhz 13ms tmr0l = 0x00; // limpa a carga do timer0 return result; } adicionado 8 minutos depois Para facilitar o entendimento aqui esta o código em PDF. Codigo.pdf
-
Problema com estática/ruido no computador.
Lucas Pereira de Souza respondeu ao tópico de Guilherme Rennau de Souza em Eletrônica
Muitas da vezes esses problemas com harmônicas não depende só da sua instalação, mas também a do seu vizinho, talvez a instalação dele esteja produzindo harmônicas na rede. -
PIC Controle de velocidade com PWM e RPM encoder
Lucas Pereira de Souza respondeu ao tópico de RAPOSA YOKO. em Microcontroladores
Eu fiz um encoder a um tempo atrás, da para fazer deu duas maneiras uma e com o CCP do microcontroladoor, a outra e maneira e configurar o timer0 do microcontrolador com contador de pulso externo e converter o valor da contagem para RPM ou RPS, exemplo: rpm = TMR0L; //AMOSTRAGEM DO TIMER0 rpm = rpm*60; //TRANSFORMAÇÃO PARA SEGUNDO rpm = rpm /9; //Aqui e o numero de partes que você contou no caso do exemplo foi 9 lcd_cmd(0b00000001); // Limpa o display lcd_cmd(0xc0); // Posiciona LCD na segunda linha lcd_number(rpm); //ESCREVE VALOR DA CONTAGEM Delay1KTCYx(1); Agora para controlar a velocidade basta implementar rpm em seu PWM. -
Arduino Recomendação de curso de programação C/C++ para Arduino
Lucas Pereira de Souza respondeu ao tópico de Alberth OC em Microcontroladores
Como aphawk disse, o correto e você dominar a parte de hardware dos microcontroladores, eu recomendaria que você focasse em estudar eletrônica digital e analógica, para você ter uma base para estudar um hardware de um microcontrolador e suas aplicações. Eu falo isso por experiência própria, mesmo hoje, eu estudando bastante eletrônica analógica e digital dependendo do que eu tenho que projetar com um uC as vezes encontro umas dificuldades. Eu recomendo a você dois fabricantes de microcontroladores, dos quais são os mais conhecido do mercado, ATMEL e MICROCHIP, ambos tem ótimos microcontroladores. No site da Microchip você encontra o IDE para ambos microcontroladores, os dois podem ser programado em assembly e C. A vantagem da placa Arduino e a sua facilidade de programar e montar protótipos, entre tanto, para quem deseja aprender eu não recomendaria ir direto com Arduino, já que você não vai aprender muito, devido as facilidades com o mesmo, porém, se não for por fins de aprendizagem em eletrônica eu recomendaria muito.

Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
