
RAPOSA YOKO.
-
Posts
144 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Fabricantes
Livros
Cursos
Análises
Fórum
posts postados por RAPOSA YOKO.
-
-
Já que suas respostas são limitadas vou esperar por paulo.kkkkkkkk



 mas obrigado kkkk
mas obrigado kkkk
-
 1
1
-
-
Obrigado Isadora , vou tentar isso !
Caso alguém tenha algum código
Pronto para teste será bem vindo não que eu queira algo pronto !
adicionado 13 minutos depois isadora você tem em ccs c os programas com avrs sao bem difíceis de fazer e os gravadores ARDUINOS eu não gosto ,apenas a CCS C ME FASCINA kkkkkk-
 1
1
-
-
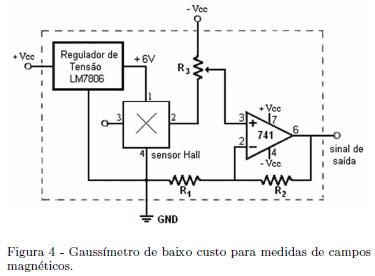
Pessoal eu encontrei um esquema de um GAUSSIMETRO mas estava querendo fazer com PIC será que alguém aqui do Clube do Hardware tem
Um programa em assemble , PIC CCS C ,ou até mesmo com microcontroladores AVRS qualquer coisa serve!

-
4 horas atrás, vangodp disse:
não entendo o motivo da sua consulta.... você quer carregar esses dados no seu programa, é isso? Se for assim você pode exportar os dados como csv e ler eles desde seu programa.
Não eu quero criar uma onda senoidal no Excel ,para saber os valores em seno da senoide ! Entendeu?
-
Olá pessoal este tópico ,é para falar sobre cálculos de transformadores de ferrites ,dúvidas , sugestão, criação de trafos experimentais etc... Qual seria a melhor fonte os grandes de ferro silício ou os superpermalloy e os de ferrites ? Fiquem a vontade pessoal! Outra coisa eu gostaria de programa-lo e medir sua temperatura ,corrente e tensão! Aceito sugestões de códigos em CCS ou em C mesmo ! Thanks ,
-
Tenho que fazer um programa em C que crie um vetor ,e neste vetor tem a representação de uma onda senoidal defasada em 120 Graus no Excel , com os valores de amostragem em seno ,na programação eu desenrolo ,mais eu sou péssimo no Excel!

-
Em 27/09/2019 às 11:12, aphawk disse:
Nossa mãe do Céu ..... o que que adiantou falar isso para a dúvida em questão ???????????????
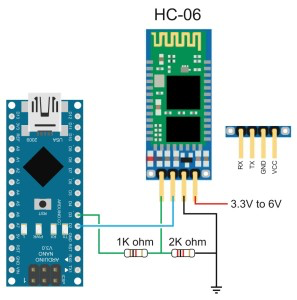
Eu usei esse módulo deste jeito aqui :
Sem os resistores, não funcionou de jeito nenhum ....
Paulo
É por que eu pensei vai ver ele no futuro queira construir um caça de ataque não tripulado kkkkkkkkkk


 e com essa tecnologia tem uma porcentagem significativa de invisibilidade kkkkkkkk
e com essa tecnologia tem uma porcentagem significativa de invisibilidade kkkkkkkk vai Brasil
vai Brasil
-
Escolhi já a melhor resposta kkkkk
-
@aphawk estou pesquisando , seguindo as dicas de estudar a parte do hardware e saber o porquê , disso daquilo , aquelas coisas que leva a invenção do motor , a necessidade da defasagem a tabela verdade formada , procurando pesquisar o porquê da frequência e frequência de PWM ,kV ,amperes x células , tudo pra saber fazer direitinho , o que eu conseguir é lucro , eu encontrei aqui no ch um tópico muito bom
Acho que posso colocar e escolher a melhor resposta e por o tópico como resolvido !

 Obrigado a todos amigos , tendo êxito irei postar novamente !Valeu!
Obrigado a todos amigos , tendo êxito irei postar novamente !Valeu!
-
1
-
-
3 horas atrás, aphawk disse:
Eu sei lá aphawk rsrs vou fazer sem então , gostaria de aprender quando for precisar transformar em AC , isso é uma ciência ainda não aprendi tudo , eu nunca fiz faculdade rsrs aprendo devagar , kkkk claro ninguém nunca aprende rápido embora que digam ao contrário se você não tem informação vai ser difícil assimilar

-
@aphawk eu quiz dizer que eles são rápidos para o processamento e aumentar a frequência , copiar é. Apenas agilizar o raciocínio
-
15 horas atrás, Isadora Ferraz disse:
pêêêêêêêê! Você está focado no sw - só moleza - e nem quer saber do hw - dureza. .. como Paulão já havia percebido. Se ele achar que deve, poderá te conduzir melhor.
Com dificuldade de sintonizar, de minha parte acho melhor mesmo aguardar...
Pena que não sei se vai dar tempo de ver sua evolução...
Isadora eu sou parente do ex presidente João Pessoa Cavalcanti de Albuquerque Meu nome é Charles Francês Ribeiro Cavalcanti eu sou Optimus Prime nada permanece imutável rsrs eu evoluo , kkkkk eu sou importante , eu sou o seu rei kkkkkkkkkk
 vai dar tempo sim rsrs lezeira da po**@ velho kkkkkkkkk
vai dar tempo sim rsrs lezeira da po**@ velho kkkkkkkkk
-
Kkkkkkkk eu ... eu ,eu sei kkkkk espere deixa eu responder rsrs!
Em 18/09/2019 às 07:51, Isadora Ferraz disse:aqui! eu!!eu! eu sei! eu sei!! deixa eu responder?? ahhh. deixa vai!! chato... então tá... não tiremos o prazer do garoto descobrir por si... Mas algo me diz que ele vai googlar... e deve.
abç
Kkkkkkkkkkk
 acho que a frequência vai depender do micro , talvez um dsp DSP (Processador de Sinal Digital) e a simplicidade e capacidade de manipulação bit a bit de um microcontrolador. Os controladores estão disponíveis em diversas opções de encapsulamento de escalas e quantidade de pinos diferentes. Além disso, essa família contém periféricos otimizados para resposta em tempo real e rápidas malhas de controle. O grande portfólio de DSCs dsPIC inclui mais de 1500 variações de produto, portanto certamente haverá a solução perfeita para a minha aplicação específica. também o tipo de condutor mais rápido , melhorias posteriores kkkk mais isso fica pra depois rsrs! Agradeço muito a paciência de vcs meus amigos do Clube do Hardware!valeu mesmo! de coração!
acho que a frequência vai depender do micro , talvez um dsp DSP (Processador de Sinal Digital) e a simplicidade e capacidade de manipulação bit a bit de um microcontrolador. Os controladores estão disponíveis em diversas opções de encapsulamento de escalas e quantidade de pinos diferentes. Além disso, essa família contém periféricos otimizados para resposta em tempo real e rápidas malhas de controle. O grande portfólio de DSCs dsPIC inclui mais de 1500 variações de produto, portanto certamente haverá a solução perfeita para a minha aplicação específica. também o tipo de condutor mais rápido , melhorias posteriores kkkk mais isso fica pra depois rsrs! Agradeço muito a paciência de vcs meus amigos do Clube do Hardware!valeu mesmo! de coração!
-
Valeu ! Paulo ! Isadora Valeu ajuda de vcs é sempre útil! , vou continuar estudando!
adicionado 0 minutos depoisKkkk
adicionado 2 minutos depois20 horas atrás, aphawk disse:Ok..., já ví que vai ser do jeito mais difícil né kkkkk
Qual a impedância de carga à qual o circuito RC estará conectado ? De preferência em números complexos ou em fasor, ok ?
Po meu, você mal aprendeu a subir no ônibus e já quer sentar na janelinha ????? kkkkkkk
Paulo
De fasores kkkk! Qualquer exemplo serve é minha primeira vez kkkkk de acordo com todas as especificações da frequência do pwm , os 40mhz do micro, 39,3khz f= pwm etc... O de antes ...
-
isadora deu uma risada kkkkkkkkkkkk ficou sentida kkkkk
desisti de fazer por força contra eletro motris vou fazer por sensor hall entao vou fazer o de 120 graus defasados aquele de antes com os calculos todos ja feito é mais rápido kkkk entao me ajudem no RC somente kkk
-
@aphawké assim que agente pega a onda com os mais esperiente agente joga a verde pra colher a madura kkkkkkkkkkkkkkkkkkkkkk """Se a frequência for baixa demais vai ter vibração sim, mas no resto tá tudo certinho""""
então vou aumenta-lao maximo que eu puder ! kkkkkkkkkk eu quero um motor SUAVE NA NAVE PAULO KKKKK MEU NOME É ENEAS PAULO kkkkkkkkkkkkkk
-
Em 17/09/2019 às 18:41, aphawk disse:
Conceito físico errado, meu amigo ....
A vibração é devido 100% à frequência escolhida no PWM, a resolução não tem nada, mas nada mesmo, a ver com isso !
voce pretende controlar o seu motor em quantos níveis diferentes de potência ?
Com 8 bits você já tem 256 níveis, o que é mais do que suficiente para controlar !
Mesmo os ESC's usados em RC usam 8 bits, apenas os top de linha trabalham com 10 bits, e aí vem você e fala em 14 bits ?????????
A grande maioria dos Esc's trabalham com menos de 8 Khz de frequência....
Paulo
Se a resolução não tem nada , mais nda aver com isso rsrsr então explique o de onda quadrada com pouca resolução pois o mesmo é puramente digital.
uma das desvantagem desse tipo de controle é produzir variações maiores de torque se comparado ao analogico(PWM) e as perdas decorrentes a correntes parasitas nos rolamentos do motor são maiores do mesmo modo que a dissipação de calor,ocasionando maiores vibrações e ruidos e contribuindo para diminuir a vida util do motor !
-
agora, Isadora Ferraz disse:
... acho que depois de ler o d.s., fiz isso pra um pic16f628...
void duty(unsigned int dt) { CCPR1L=dt>>2; //MSB (byte + significativo) #if !defined mikroc CCP1Y=dt<<4; //LSB (bit4 pro CCP1Y) CCP1X=dt<<5; //LSB (bit5 pro CCP1X) #else CCP1CON.CCP1Y=dt<<4; //LSB (bit4 pro CCP1Y) CCP1CON.CCP1X=dt<<5; //LSB (bit5 pro CCP1X) #endif }... e isso prum 16f876
void duty(unsigned int dt) { CCP1Y=CCP2Y=dt; //LSB (bit0 pro bit4 de CCP1CON) dt>>=1; CCP1X=CCP2X=dt; //LSB (bit1 pro bit5 de CCP2CON) dt>>=1; CCPR1L=CCPR2L=dt; //MSB (byte + significativo) }Se for forte, leia o d.s. e entenda bit a bit... Ou se for fraco, veja se seu compilador tem função pwm mastigada... continue fazendo parte da maioria...
muito bom ,esta correto os ifs é assim que pretendo fazer rsrsr mais estou utilizando apenas 10 bits o meu vetor so chega ate 1022 em decimal ok? o calculo da frequencia do pwm que deu 39,3 Khz me permite 10 bits é isso!
-
agora, Isadora Ferraz disse:
Confuso e indeciso amigo... ndv pwm com deslocamento de bit. Vejamos...
Se o mc trabalhar com 8 e seu pwm tem 10 bits, geralmente é só questão de posicionamento dos bytes no registro algo como
//na maior largura = 1023 ou 0x3ff => 10 bits H_byte_dutty_PWM=0x03; //nome do registro onde se localizam os 2 bits MSb L_byte_dutty_PWM=0xff; //nome do registro onde se localizam os 8 bits LSbpor função:
setduttycycle(unsigned int ds) { L_byte_dutty_PWM=ds>>8; //* nome do registro onde se localizam os 2 bits MSb ... posição bits 1 e 0 H_byte_dutty_PWM=ds; //nome do registro onde se localizam os 8 bits LSb } //* só um pouqinho a ver. De fato é só pra posicionar corretamente nos bits 1 e 0 mas //estes MSb poderiam estar em qualquer posição. Consulte o d.s.Na maioria dos casos, pra girar motor bastam 8 bits de pwm o que torna o sistema mais rápido e otimizado pra mc de 8 bits
so que se eu escolher com 10 bits o meu pwm ira fazer com que o motor bldc tenha menos vibrações indesejados e maior eficiencia e menos dissipação de calor! por que estou me aproximando imitando uma onda sinusoidal! Ahannn rsrsr e os meus calculos estão corretos kkkkkkkkk os dois registradores de pwm desse micro que estou utilizando é de 14 bits no calculo isadora somente 10 bits estão sendo utilizados pic18f4431 ok?
-
agora, aphawk disse:
14 bits de PWM no Pic ?
Já fêz as contar para ver qual a máxima frequência que vai ter essa resolução?
Paulo
paulo voce me conhece das antigas sabe que eu nunca Matheus nunca erra quando é sobre os timers dos pics kkkkkkkk eu não tenho uma boa didatica mais serei breve ,de mente clara ,pretem atenção kkkk o meu ciclo de maquina é de 40 mega estou colocando tambem o pll junto , e o prescaler de 1:1 deu 100ns com um prescaler de 1:4 deu 400ns a cada 4 ciclos de maquina ocorre um incremento do time ,ate aqui estou dominando bem rsrsr ufa kkk e a frequencia do pwm eu escolhi 39,3 Khz com a formula da resolução que isadora disse que preferia ter olhado no datashet em vez de calcular eu calculei e deu 10 bits pra você encontrar a formula da frequencia de pwm é simples
Tpwm = C.M*prescaler*postcaler*<PTPERH:PTPERL>
Tpwm= 100ns 1*1*255 =25,500us
Fpwm =1/Tpwm
Fpwm=1/25,500us
Fpwm=39,3KHz
eu quero um like kkkkkk
-
@Isadora Ferraz como eu disse antes o pwm chega ate 14 bits sendo que estou utilizando 10 bits ,então vou converter em uma tabela todos os vetores
de 10 bits de decimal para binario e depois deslocar para a direita 8 vezes os bits
e ver qual o duty cycle do pwm ! depois que confirmar que e´10 bits
vou controlar o duty cyclo com ifs e na entrada eu configuro os o AD do Pic! para receber os sinais dos sensores Hall eu apenas coloco alguns pinos como entrada digital e pronto ,simples não ? kkkk ainda estou engatinhando , acho que vai dar certo! vou tentar colocar um especie de acelerador no codigo rsrs aceito sugestões
-
Olá, Eu gostaria de fazer um projeto baseado em um microcontrolador PIC16F: o projeto é projetar um ESC sem sensor para motores CC sem escova. O algoritmo sem sensor baseia-se na detecção do evento cruzado zero do EMF de volta que ocorre 30 graus elétricos antes que a próxima comutação ocorra. O PWM com uma frequência de 20 kHz é usado para variar a tensão efetiva aplicada ao motor, de modo a controlar a velocidade. Como o PWM pode ser muito barulhento, o EMF de retorno na fase flutuante deve ser filtrado com um filtro passa-baixo para que o evento cruzado zero seja detectado com precisão, os comparadores também são usados para comparar a tensão de EMF de retorno com a tensão de ponto neutro virtual. Portanto, para filtrar o EMF de volta, são usados filtros passa-baixa RC, o problema é que esses filtros introduzem um atraso no sinal filtrado, e esse atraso deve ser levado em consideração para calcular o tempo antes do ponto de comutação. Encontrei na internet um tutorial muito bom que explica como funcionam os filtros passa-baixas RC e algumas fórmulas para calcular a reatância capacitiva e escolher os valores do capacitor e do resistor, para filtrar um sinal que possui uma frequência conhecida, além de fornecer também uma fórmula para calcular o atraso da fase em graus, mas não fornece uma fórmula para calcular o atraso do tempo em segundos ou µs ... aqui o link deste tutorial: Alguém pode me ajudar a escolher os valores corretos de capacitor e resistor e também fornecer etapas detalhadas para calcular o atraso de tempo para qualquer valor de capacitor e resistor? Obrigado
-
@Isadora Ferrazoperador de deslocamento bi a bit faz isso ate no vetor ele escre em uma posição de memoria esse seu codigo é parecido com o seno[passoA]>>8; do meu vetor controle de motor bldc
void wport8(unsigned char d) { PORT(15,(d>>0)&1); //! PORT(2, (d>>1)&1); PORT(4, (d>>2)&1); PORT(16,(d>>3)&1); PORT(17,(d>>4)&1); PORT(5, (d>>5)&1); PORT(18,(d>>6)&1); PORT(19,(d>>7)&1); } saberia me indicar um bom livro que me passe uma boa didatica ! com operador de deslocamento bit a bit? caramba parece que nem ficaram contentes em rever um amigo kkkkkkkkkkkkk
-
@vtrx entao coloca 60 hz por que não pode colocar outro valor maior não? Eu quiz dizer 40000000 MHz e uns 37. Alguma coisa , é pra calcular o que dos times kkkkk? Explique!


Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais

gaussimetro com pic ,ccs c , assemble ou avrs
em Microcontroladores
Postado
kkk paulo sempre foi legal comigo ... kkkk


 ele vai me ajudar rs!
ele vai me ajudar rs!
KKK ESSA FOI BOA rs!