

Douglas Furlan
-
Posts
2 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Fabricantes
Livros
Cursos
Análises
Fórum
Tudo que Douglas Furlan postou
-
Ajuda para fazer um Inversor de Frequência com Microcontrolador PIC.
Douglas Furlan respondeu ao tópico de ogaittiago em Eletrônica
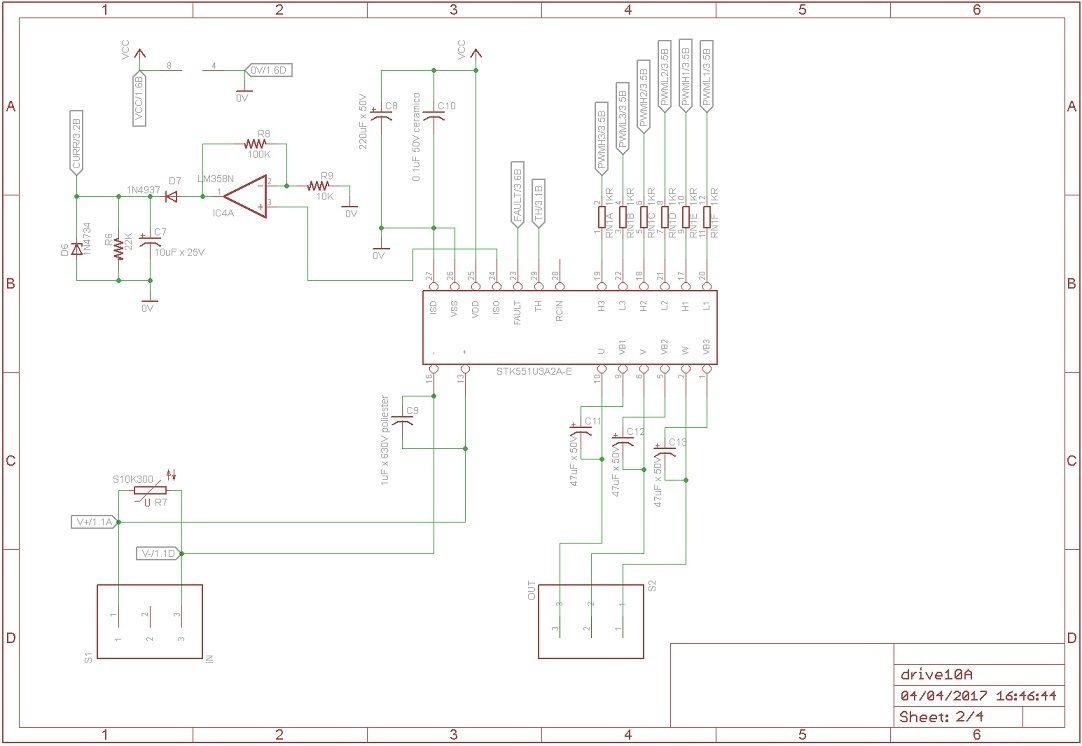
Já desenvolvi um projeto de inversor de frequência trifasico 10A para uso comercial. Usei um modulo IGBT usei o STK551U3A2A-E ligado diretamente a um PIC DSPIC30F com resistrores de 1K. Também foram usados muitos outros periféricos. Não é algo simples, gastei muito tempo e dinheiro. Mas com pesquisa e estudo você consegui, apenas avalie qual é seu objetivo nessa empreitada. Se você for a fundo nesse desenvolvimento, isso pode te ajudar muito na programação: para uma meia senoide crie uma tabela de Seno, de 3 em 3 graus. float32 const seno_tab[61]={0, 0.052, 0.105, 0.156, 0.208, 0.259, 0.309, 0.358, 0.407, 0.454, 0.5, 0.545, 0.588, 0.629, 0.669, 0.707, 0.743, 0.777, 0.809, 0.839, 0.866, 0.891, 0.914, 0.934, 0.951, 0.966, 0.978, 0.988, 0.995, 0.999, 1, 0.999, 0.995, 0.988, 0.978, 0.966, 0.951, 0.934, 0.914, 0.891, 0.866, 0.839, 0.809, 0.777, 0.743, 0.707, 0.669, 0.629, 0.588, 0.545, 0.5, 0.454, 0.407, 0.358, 0.309, 0.259, 0.208, 0.156, 0.105, 0.052, 0}; Cria uma um algorítimo, como o abaixo, chame-o com o auxilio de um timer, exemplo. quando o motor estiver rodando em 10hz, uma senoide terá 100ms meia senoide terá 50ms. Como 1/2 senoide foi dividida em 60 pedaços de 3 graus. 50ms/60=0,833ms. faça o timer chamar a função a cada 0,833ms //////////INTERRUPÇÃO USADA PARA PWM/////////////////////////////////////// #int_timer3 void trata_t3() { set_timer23(set_tempo23); ////// seta timer 2-3 /////////incrementa numero de graus da senoide graus1++; if (graus1>60) {graus1=1;} //180 graus dividido por 18 (180/60=3) estamos pulando de 3 em 3 graus graus2= graus1+40; if(graus2>60) {graus2-=60;} //graus esta adiantado 120 graus (defazamento trifasico) graus3= graus2+40; if(graus3>60) {graus3-=60;} //cada posição da tabela tem 3 graus devemos pular 40 posições(40x3=120graus) ////////tensão instantanea v_inst1 = v_pico*seno_tab[graus1]; v_inst2 = v_pico*seno_tab[graus2]; v_inst3 = v_pico*seno_tab[graus3]; ////////Seta PWM//////////////////////////////////////// set_motor_pwm_duty(1,1,v_inst1); set_motor_pwm_duty(1,2,v_inst2); set_motor_pwm_duty(1,3,v_inst3); } 00900a.pdf
-
Problema com Sensor e ADC do PIC
Douglas Furlan respondeu ao tópico de rodrigocirilo em Microcontroladores
Atente para solução do amigo Felipe. O sensor disponibiliza um sinal de tensão, mas a potencia/corrente é baixa. Acredito que a impedância na entrada AD do pic seja 2K5. por isso ocorre a queda do sinal. Um LM358/258/158 pode resolver.
Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
