

GustavoH93
-
Posts
834 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que GustavoH93 postou
-

Como saber a corrente e tensão do motor de passo?
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
kkkkkk lembrei também que para funcionar o motor de passo provavelmente teria que usar uma biblioteca para motor de passo, se usar o motor DC posso não precisar disso e fazer funcionar só pela programação. Certo tirei um BC547 da gaveta e coloquei ele para acionar o motor usando 5v da fonte de bancada programei o arduino para emitir pulsos em um intervalo de tempo para saber o quanto o motor iria girar e por quanto tempo. os pulsos foram de: 50, 100, 150 e 200ms com o pulso de 50 o motor quase não se mexe, com o de 100 dá quase 1/4 de volta, 150 meia volta e 200 quase uma volta inteira, estou achando que conforme mais longo o pulso o motor embala e ganha inércia continuando girando mesmo depois de não receber mais energia, será que isso pode afetar o funcionamento? Tipo assim: o arduino manda um pulso para o motor abrir a borboleta, mas ele acaba embalando e passando do ponto que deveria parar, o arduino percebe isso pelo potenciometro e manda o comando para o motor voltar, mas voltando o motor passa do ponto de novo e então fica tentando seguir o potenciometro com o motor embalando... Isso pode acontecer ou não é bem assim? Também estou pensando se seria viável colocar um imã no eixo e usar uns 3 reed switch, um indica o começo o outro o meio e o final. passando de 3000rpm do motor do carro mandar abrir a válvula até o meio, passando de 4000 abrir totalmente por exemplo... -
Como saber a corrente e tensão do motor de passo?
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
boa ideia, não tinha pensado nisso. Então o ideal mesmo é usar um potenciômetro para indicar a posição da borboleta e um sensor ou fim de curso para indicar a posição inicial e final. Mas aí vem a questão eu tirei a mola e realmente ficou super leve para girar o eixo, me lembrei que tenho um motor DC com redução também, é o mesmo que usam pra girar rodas de carrinhos: Em ambos os casos precisaria do potenciômetro e pra ligar o motor de passo precisa dos tip122 ou para ligar o motor DC precisaria de uma ponte H. Fiz uma lista aproximada dos valores e percebi que estão bem próximos, neste caso seria melhor uma ponte H e usar o motor DC com redução ou usar o motor de passo com os Tip? Será que ponte H e o motor DC tem mais torque que o motor de passo? Também tenho motor de vidro elétrico aqui esse sim tem força de sobra, mas acho que precisaria criar uma ponte H com transistores parrudos pra conseguir ligar ele, acho que dá pra fazer ponte H com relê também, mas relê tem vida curta nessa aplicação não tem?
-
Como saber a corrente e tensão do motor de passo?
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
potênciometro é a base para os servomotores também não é? No servo ele gira o motor para um lado ou para outro baseando na posição do potênciometro. aqui imaginei que não fosse necessário sabendo as posições inicial e final. Ok vou tirar a mola, pensei em adaptar uma rosca sem fim mas vai ser beeem complicado, mais fácil tirar a mola mesmo. Vou atrás do 2003 então, mas uma duvida que tive agora: A corrente do motor mesmo que seja mais elevada do que a limite do componente não chega a tostar ele se for por curtíssimos períodos de tempo, mas como em qualquer motor quanto maior a carga no eixo mais corrente ele puxa, então se por acaso a borboleta resolver emperrar no caminho travando o motor ele pode puxar mais corrente e isso pode queimar o 2003 né? Tem como fazer algum circuito para evitar queimar o CI caso a borboleta trave ou o circuito é tão complexo que para essa aplicação nem vale a pena fazer? -
Como saber a corrente e tensão do motor de passo?
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
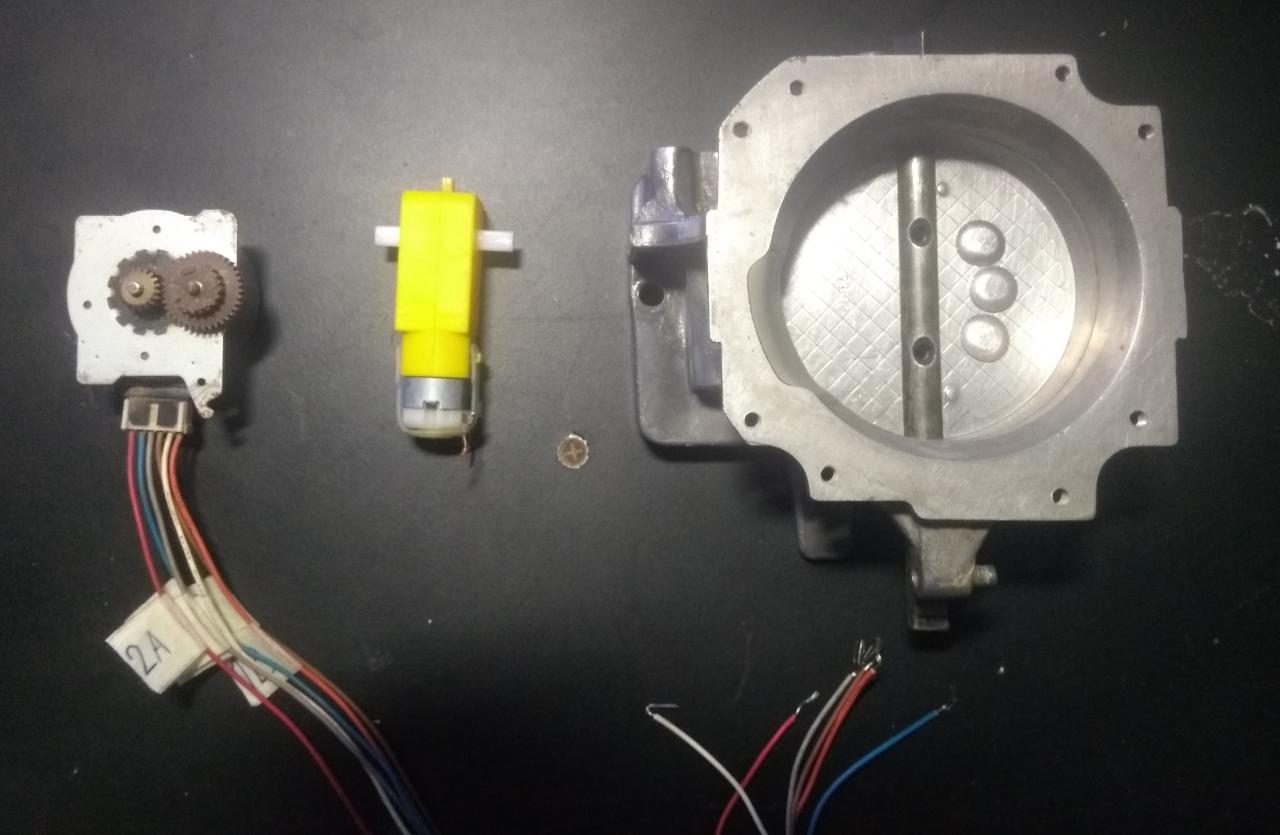
Eu consegui umas chavinhas dessas de porta de microondas, pensei em colocar uma para indicar totalmente fechada e outra indicando totalmente aberta, o arduino vai precisar saber a RPM do motor para poder abrir essa borboleta porque ela vai no escapamento ela é a válvula cutout conforme o giro do motor subir ela vai abrindo, fazendo os gases do escape passarem por fora dos abafadores, teoricamente fazendo o motor ganhar um tikinho de potencia e deixa o barulho do carro mais esportivo... A válvula original desse tipo é acionada pneumaticamente conforme o motor acelera e sugando o ar cria-se vácuo e faz a válvula abrir: Como essa válvula é beem cara peguei um TBI de sucata e estou adaptando ele para essa função kkkk a ideia então é fazer com que até 3000rpm por exemplo a válvula esteja totalmente fechada, depois disso ela começa a abrir até ficar totalmente aberta ali pelos 5000rpm. Vou ver se consigo diminuir a pressão da mola se não conseguir vou tirar mesmo, ela é bem dura além de fechar a borboleta ela também puxava o pedal do acelerador de volta pra cima quando o motorista tirava o pé. Entendi, nesse caso ao invés do ULN2003 será que tem como alimentar as bobinas com transistores? Não tenho o 2003 aqui agora, mas tenho um punhado de 2n3904, nem me lembro do porque tenho eles mas se puder usar para eles receberem o pulso do arduino e ligarem as bobinas do motor seria bem interessante, afinal o 2003 é basicamente um CI com vários transistores darlington não?
-
Como saber a corrente e tensão do motor de passo?
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
acabei de medir ele tem 20mm de altura e 40mm de comprimento. Então eu iria usar o ULN2003 como driver porque pensei em usar o arduíno para comandar o motor, mas se puder usar apenas CIs para controlar o motor acho que fica até melhor, vou pesquisar a respeito disso. Então o bom é que do lado do eixo do motor tem uma engrenagem para fazer redução de velocidade e aumentar o torque aí acho que esse motor vai conseguir executar a tarefa. Na verdade ele vai abrir a válvula de borboleta de TBI que é bem parecida com essa aqui: Abrir e fechar seria tranquilo se não fosse a mola de retorno que marquei em vermelho essa mola faz uma leve pressão mantendo a válvula fechada, mas conforme a válvula vai abrindo maior fica a pressão que a mola faz pra voltar eu até pensei em retirar a mola, mas se der algum problema com o motor de passo ele pode parar na posição aberta e aí a mola faria a válvula fechar de forma mecânica. Mas para saber se o motor vai ter força suficiente para abrir a válvula com a mola só testando para saber. Certo mas para o driver que vai fazer o motor funcionar precisamos saber a corrente que passa pelo motor né? Acabei de ler que o ULN2003 suporta até 500mA será que este motor consome mais do que isso? Tenho uma fonte 12v com amperímetro e mesmo que o motor não gire se eu alimentar uma das bobinas com essa fonte vou saber qual a corrente que vai passar pela bobina e se for abaixo de 500mA posso usar o 2003 correto?
-
Como saber a corrente e tensão do motor de passo?
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
pior que esse não veio escrito a tensão e ainda está começando a ser consumido pela ferrugem kkkk vou passar algo ali pra proteger. O motor parece grande na foto mas na verdade é até pequeno, já que não precisa limitar a corrente para fazer funcionar será que poderia usar o ULN2003A para acionar o motor? Assim eu poderia usar o A4988 para outra aplicação. Me lembrou aquele motor das ventoinhas de radiador, tem uma resistência baixíssima e quando ligam consome bastante corrente, mas quando estão na velocidade de trabalho a corrente diminui. Então se a impressora tem alimentação de uns 30v alimentar este motor com 5v ou 12v deve funcionar tranquilamente mesmo sem limitar a corrente certo? Por curiosidade liguei duas pilhas em série em uma bobina desse motor e ela funcionou, imaginei que com 3v nem iria conseguir fazer o motor dar algum sinal de vida.
-
Boa noite a todos, estou montando projetos para usar no carro e um deles vou precisar abrir uma válvula borboleta é uma tarefa simples pensei em usar motor DC com ponte H ou servo motor para esta função, mas lembrei que tenho um motor de passo que peguei de sucata dando sopa aqui então usarei ele. O problema é que mesmo pesquisando sobre ele não encontrei nada só sei que era de uma impressora EPSON, é um motor de 6 fios então são duas bobinas com a derivação no meio, identifiquei as bobinas e fiz este esquema com a resistência que medi: Eu tenho um driver A4988 que poderia usar para ligar este motor, mas como saber qual a tensão que este motor aceita? Pensei em ligar em 12v mas imagino que teria que ajustar o driver para limitar a corrente e também não sei qual a corrente máxima do motor... Usando a lei de ohm com a resistência de 13 ohms e uma tensão de 12v deu 0.923 Ampères, essa seria a corrente que o motor suporta ou não é bem assim que se calcula a corrente do motor?
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
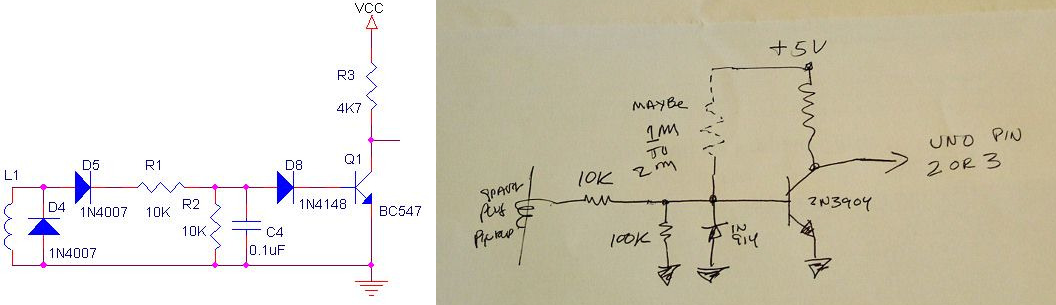
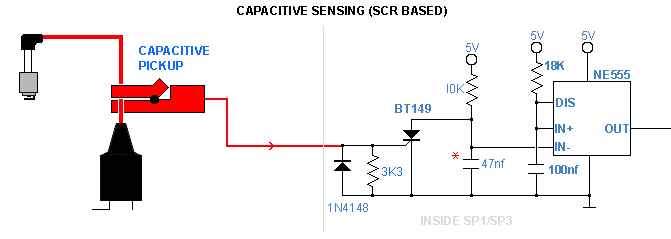
Oi pessoal, já fiz a listinha dos componentes e sensores que vou precisar, mas com relação ao circuito que vai "sentir" a centelha pelo cabo de vela ainda não sei bem como proceder ainda mais que o BT 149 não estou encontrando... Achei mais alguns circuitos que prometem converter o pulso da vela em onda quadrada: Qual circuito seria o mais indicado? Este não usa o 555 mas também não usa o BT 149, alguém aí tem uma dica de substituição ao 149 ou sabe de algum circuito melhor para executar esta função? Assim que escolhermos o circuito para capturar o pulso da vela vou comprar os componentes e encerrar o tópico, depois vou abrir o próximo tópico focado na programação...
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
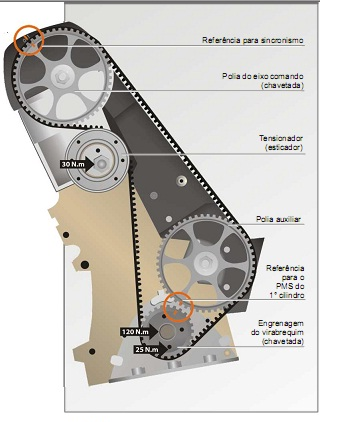
Boa Sergio não tinha me tocado disso, a ideia era usar a marcação do volante do motor para saber a rotação e a posição do primeiro pistão, sabendo a posição do primeiro pistão e o momento da centelha da vela dá pra calcular o ponto, mas acabei esquecendo que dessa forma o volante vai dar uma volta completa e ocorrerá uma centelha, porém na próxima volta completa do volante o pistão estará novamente na posição e não vai ter centelha porque estará no primeiro tempo. Então no volante temos a marcação que indica o primeiro pistão no topo do cilindro: Na polia temos o ponto de sincronismo que não necessariamente indica que o pistão está no topo, mas indica que o primeiro cilindro está no terceiro tempo, essa marca quando está alinhada com o cabeçote mostra que é a posição correta para a troca da correia dentada: Realmente foi bem lembrado isso @Sérgio Lembo e a solução você nos deu também, ao invés de posicionar o sensor óptico na polia do virabrequim vou colocar ele na polia do comando de válvulas, assim teremos a indicação correta do primeiro pistão e para ter a RPM também é só multiplicar por 2 na programação. pois é kkkkk nem eu, bom saber não é o caso mas talvez em um projeto mais sofisticado acho que até um dissipador de calor em cima do AT MEGA poderia ser bem vindo. Certo vou posicionar ali bem perto do cabo da vela, e o sinal do circuito vai pelo cabinho coaxial até o arduino que vai ficar dentro do carro, mas no circuito aí usou uma garra capacitiva, será que usar cabo de 1mm com umas 15 voltas já faz a mesma coisa? E pra variar o BT 149 não estou achando, será que podemos substituir ele por um BC547?
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
Boa Paulo vou seguir suas dicas e o cabo coaxial seria tipo esse aqui?: https://www.baudaeletronica.com.br/cabo-manga-5-vias-26awg-5x26awg-com-blindagem.html Nossa estava esquecendo de algo importante, para poder calcular o ponto de ignição precisaremos informar ao arduino o momento da centelha do primeiro cilindro, imaginei fazer isso com um fio enrolado ao cabo de vela, mas o circuito para deixar o sinal com 5v quadrado para ser usado pelo arduino não tenho 100% de certeza, será que algo assim daria certo? Preciso realmente do 555 ou daria pra fazer usando transistores? @Renato.88 aquela primeira parte do circuito que pegamos da revista será que funcionaria aqui pra estabilizar em 5v e limpar a onda suja que vem do cabo de vela?
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
então a ideia era usar os 5V do arduino mesmo, mas posso também usar uma alimentação separada se for preciso, inclusive acho que como o sensor vai ficar longe do arduino talvez seria interessante uma tensão levemente maior porque acaba tendo perdas pelo fio ser longo né? Boa pergunta, mas no meu caso acho que vamos trabalhar apenas com int para a temperatura, é legal saber se é 25°C ou 26°C os números após a virgula acho que não são necessários. O código dele realmente precisa de uma referencia para calcular a temperatura, pro vídeo ele coloca a temperatura ambiente no código e carrega pro arduino, no meu caso acho que vou fazer assim: Usar um NTC de 10k para informar a temperatura ambiente, e essa temperatura vai ser a referência de temperatura para o arduino calcular a temperatura do diodo que vai ser posicionado internamente, o que acham? Eu tinha certeza que uma hora você iria comentar sobre o comprimento do tópico kkkkkk e realmente ele está ficando longo mesmo, esse aqui acabou que estamos decidindo os sensores que vamos usar, então vamos fazer assim nesse tópico escolheremos quais sensores usaremos depois eu crio um novo com o foco na programação. por enquanto os sensores que vamos usar serão esses: Pressão de Óleo sensor resistivo (tenho) Temperatura do Óleo sensor resistivo (tenho) Temperatura do fluído do radiador sensor resistivo (é o original que está no carro) Pressão/Vácuo do Turbo Sensor MAP (tenho) Pressão do combustível sensor resistivo (tenho) RPM do motor sensor óptico Temperatura ambiente NTC 10K Temperatura interna do ar Diodo 1N4148 Rotação do Turbo sensor óptico Se alguém mais quiser dar um pitaco sobre os sensores que podemos usar a hora é agora, vou comprar os que faltam amanhã e deve chegar essa semana... off: Desculpem a demora pra responder, tinha um concurso pra fazer hoje e pra variar desde quinta feira fiquei sem internet aqui no sítio, dá nisso morar no mato sem internet eu volto pra idade da pedra kkkkkk -
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
Onde um diodo vai ficar é pós filtro de ar do carro então teoricamente não deve ter sujeira para atrapalhar ali eu acho, por falar em interferência todos os sensores tem que usar algum tipo de cabo blindado ou não precisa? Para os sensores analógicos imagino que não precisa, mas para os sensores que vão usar os pinos de interrupção é necessário ter, correto? Fuçando nos comentários achei o tal código: // set pin: const int in = A0; const int t0 = 28.0; // Coloque aqui a temperatura ambiente const float vf0 = 655; int i; float dtemp, dtemp_avg, t; #include <Wire.h> #include <LiquidCrystal_I2C.h> //Inicializa o display no endereco 0x27 LiquidCrystal_I2C lcd(0x27,16,2); void setup() { Serial.begin(9600); pinMode(in, INPUT_PULLUP); lcd.init(); lcd.setBacklight(HIGH); lcd.setCursor(0,0); } void loop() { dtemp_avg = 0; for (i = 0; i < 1024; i++) { float vf = analogRead(A0) * (5000.00 / 1023.000); //Serial.println(vf); dtemp = (vf - vf0) * 0.4545454; dtemp_avg = dtemp_avg + dtemp; } t = t0 - dtemp_avg / 1024; lcd.setCursor(0,0); lcd.print ("Temperatura=" ); lcd.setCursor(0,1); lcd.print(t); delay (100); } Não entendi 100% desse código, mas ali em cima pede para colocar a temperatura ambiente, então imagino que esse código tenha sido só para aquele teste do vídeo porque não tem como toda vez que for ligar o arduino colocar a temperatura ambiente, será que teremos que ter um sensor para mostrar a temperatura ambiente e essa temperatura servirá como base para calcular a temperatura mostrada pelo diodo? -
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
A maioria que eu vi é resistivo, esses aqui por exemplo: tem vários formatos, mas são basicamente os mesmos: This water temperature sensor thermal value is 50K. Temperature range is -40~135 degC . O do carro do meu pai que é injeção eletrônica o sensor original de fabrica é esse aqui: Não tem muitas informações mas esse símbolo no canto inferior esquerdo deve ser resistor variável, imagino que todos ou quase todos sejam NTC. @rmlazzari58 Realmente nesse caso compensa pegar o LM35 no aliexpress, mas como demora pra chegar vamos pensar em qual sensor podemos usar de momento, o DS18B20 parecia promissor mas a biblioteca pesada pode atrapalhar o código final que vai ser grande então seria entre o LM35 ou o NTC. Como o LM35 vai demorar para chegar eu ia comprar o NTC, mas o Lazzari58 comentou uma coisa que me fez lembrar dos diodos: Não sei o que tem dentro do DS18B20, mas já vi um diodo sendo usado como sensor de temperatura e parece que funciona bem, deem uma olha no vídeo abaixo por favor principalmente no final onde mostra o funcionamento: Parece que o diodo pode trabalhar bem como sensor de temperatura, a entrada de ar ali do motor não vai passar de 120°C se chegar nisso é um pico muito raro, então estava pensando em usar o diodo no lugar do NTC, na verdade por serem muito baratos (menos de 1 real cada) podemos até fazer um teste e ver qual é o mais rápido ou mais preciso, o que acham @Thiago Miotto @rmlazzari58 ?
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
É arrepiante mesmo, dei uma olhada e é um pouco complexo, mas quem sabe eu consigo aprender no futuro... Vou tentar dar uma olhada aqui com os recursos que tenho, um OSC faz muita falta nesses projetos Bom pessoal vou comprar dois módulos ópticos, mas só achei esses componentes na internet então para aproveitar o frete vou comprar também os sensores de temperatura interna e externa do ar, tinha pensado no sensor analógico LM35, mas acho que por ser usado largamente em projetos ele está com o preço meio salgado, aí vi esse aqui: Esse é o DS18B20 ele tem uma faixa de medição similar ao do LM35, só que é metade do preço e ele é digital, dá pra colocar mais de 2 sensores no mesmo pino digital e tem até uma biblioteca pronta pra ele. Mas ele deve ocupar mais memória do arduino e imagino que deve "custar" mais processamento também, está escrito no site que a biblioteca é complexa e cheia de variáveis: http://www.squids.com.br/arduino/index.php/projetos-arduino/projetos-squids/básico/278-projeto-83-termometro-digital-com-sensor-ds18b20-e-arduino Outra opção seria usar um NTC 10K fazendo a leitura analógica, O NTC é bem mais barato do que os outros sensores, mas imagino que seja lento para mudar a temperatura ele não é muito preciso mas para a temperatura não é necessário ser muito preciso, só a velocidade que ele indica a temperatura seria interessante ser rápida. Nesse caso qual tipo de sensor me indicam para ler a temperatura? O NTC é o mais barato e simples mas não sei se é lento para medir a temperatura, e o DS18B20 é mais rápido só que é bem mais "pesado pra rodar". Se souberem de outros tipos de sensores que podemos usar e quiserem comentar também é legal XD
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
A correia não tem marcas as polias tem, a correia vem com a marca do fabricante estampada mas ela some rapidinho porque o tensor fica encostado nela o tempo todo... Por falar nisso os sensores tem alguma limitação de leitura? Alguma rotação limite que acima dela eles podem falhar? Mas @.if você diz para usar o hardware do arduino para contar os pulsos ao invés de usar a programação para contar? Ouvi falar de algo assim mas me arrepio só de ouvir, deve ser suuper complexo não é? -
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
Eu nasci um pouco depois mas ainda peguei alguns discos no sebo porque era curioso e queria ver o treco rodando na vitrola Pior que zoa mesmo, tem uma marcação na porca e no rotor justamente porque se desmontar tem que montar no mesmo lugar, como a turbina gira muito rápido se montar a porca diferente da posição original fica desbalanceado e os mancais que seguram o eixo gastam rapidinho... Imagino que a posição do sensor também influencia, se ele ficar mais inclinado ou menos pode mudar também vamos testar pra ver. Agora uma outra duvida sobre o sensor óptico: Vi que tem vários modelos o mais comum é o TCRT 5000 ele parece que já cumpre a função que precisamos, mas também tem os módulos IF para arduino e eles usam o mesmo TCRT só que tem umas coisas a mais, o primeiro módulo tem um trimpot para ajustar a distancia ou sensibilidade do sensor, o outro tem o mesmo trimpot e tem um pino a mais que é analógico e libera uma tensão que vai subindo conforme a intensidade do sinal, aí a duvidas: Vale a pena pegar os módulos para medir o rpm por terem ajuste ou o TCRT já cumpre a função de boa? 2. O módulo que tem o pino analógico é interessante porque ao invés de contar os pulsos e usar interrupções usamos apenas a função MAP para converter a tensão do pino analógico em RPM, ou para essa função o ideal é contar pulsos mesmo? -
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
Pior que assim não dá porque a correia tem um tensor, inclusive achei uma imagem desse motor com a correia e as marcas de sincronismo: Então se alguma coisa ficar acima da correia ou o tensor esmaga ou pode partir a correia porque ela é bem apertada ali...
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
Eita, as correias são pretas a polia é prata kkkkkk ... desde que hava minima diferença de cor. Pra complementar, um simples capacitor como acoplador pode ajudar a detectar a passagem pelo branco.. ou pela cor diferente. Certo, vamos por partes então vou providenciar o sensor para continuarmos o projeto, aliás @.if tirei a foto da entrada da turbina e coincidentemente vi que ela tem uma das pás desbastadas isso é feito durante o balanceamento do eixo, será que o sensor ótico consegue ler essa parte desbastada que é mais brilhante? Aí vou pintar o restante e em volta de canetão preto permanente, tampa bem e é uma tinta que não tem risco de descolar e ser sugada pra dentro do motor: Nem sabia que tinha umas agulhas com escovinhas, devia ser para deixar a poeira afastada da agulha e diminuir o som de estalos característico do vinil. Talvez dê pra adaptar alguma coisa aqui ein
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
não tem, nesse caso tem pra vender a polia de cima com um pino soldado, como ela é sincronizada com a de baixo funciona da mesma forma ela só gira na metade da rotação da polia inferior: Tanto o Hall quando o reed parece que precisam de imã, e realmente pra colar teria que raspar a tinta pra colar diretamente no ferro usando cola bi componente com um imã beeem pequeno, mas mesmo assim não é 100% de certeza que vai segurar ou pode não segurar por muito tempo, a 900 rpm que é a marcha lenta pode ser ok mas lá pros 4500 RPM vai me deixar meio com medo. ainda mais que a correia dentada passa ali perto se der azar do imã pular pra dentro dela e arrebentar a correia dá um problemão Parece ser a melhor ideia, o único problema é que ali está sujeito a barro e sujeira com o tempo pode acabar tampando o sensor ótico, mas não tem muito o que fazer acho que a @.if achou a solução porque essa e á forma que menos tem chance de dar problema kkkkkk, essa tinta aí da polia é prata metalizado nesse caso posso pintar só uma faixa preta atrás dela? Aí o sensor ficaria em nível alto o tempo todo e quando a faixa preta passar fica em nível baixo. O bom é que essa era a ideia para medir a rotação da turbina também então se der certo pra medir a rotação do motor teoricamente é só copiar para medir a rotação do turbo XD
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
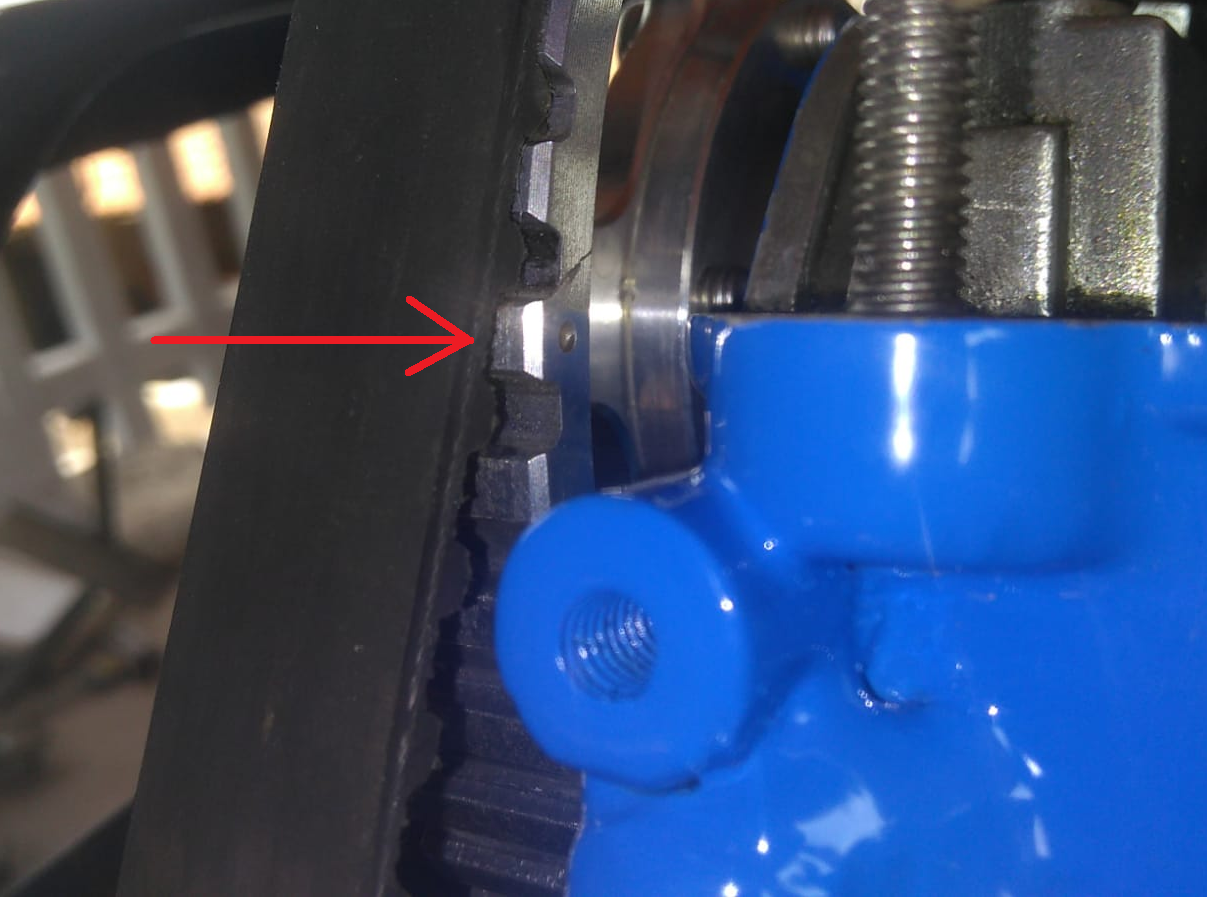
Boa noite pessoal, cheguei a conclusão que vou mesmo colocar um imã na polia externa do motor tem mais espaço para mexer e é nessa mesma polia que fazem a adaptação para instalar roda fônica: A minha é assim e vou colocar o sensor bem aqui na posição da seta vermelha com um imã pequenino colado na polia: Agora estou em duvida entre sensor Hall ou Reed Switch, qual vocês acham melhor para cumprir essa função?
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
A rotação e o ponto de ignição, para ler o ponto o arduino precisa "sentir" quando vai ter a centelha da primeira vela de ignição, a partir desse momento vai começar a contar um tempo e quando houver a indicação do volante do motor que o primeiro pistão está no ponto superior máximo ele deve parar a contagem e calcular o ponto de ignição atual. por exemplo: 15ms = 15° de ponto de ignição 20ms = 20° de ponto de ignição e por aí adiante. Pra "sentir" a faísca da primeira vela acho que teremos que usar um fio enrolado no cabo de vela, não sei se tem outra forma, porque diretamente no sensor hall ele emite o pulso para as 4 velas aí não daria certo tem que ser só o pulso da primeira. Agora para saber a posição do volante que estou batendo a cabeça, a marcação da foto está correta nessa posição é exatamente o ponto superior no primeiro cilindro então estou tentando descobrir que tipo de sensor podemos usar ali para ler essa posição, e aproveitando este mesmo sensor podemos usar essa informação para indicar a RPM. -
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
É o sensor da roda fônica: O problema é que o disco tem que ter os dentes contados, por exemplo essa aqui que tem 58 dentes mais dois dentes faltando para marcar o ponto zero, e na foto do motor que mandei os dentes são da cremalheira do volante onde o motor de partida agarra para girar e dar a partida no motor... Pensei agora em usar a polia frontal do motor talvez ali seja menos crítico colocar um imã para um reed switch, ou um sensor indutivo, mas ainda não cheguei em conclusão nenhuma...
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
Deve dar mesmo. Hum entendi um pouco melhor. Bom pessoal estou seguindo fazendo as programações e caçando as informações dos sensores na internet para poder adaptar. Aproveitei e tirei uma foto da marcação do volante do motor que marca o ponto zero, de onde penso que podemos fazer a leitura da rotação do motor, para fazer isso pensei de início em usar reed switch e um imã colado ao volante, mas o reed switch não é preparado para ficar abrindo e fechando os contatos várias vezes por segundo isso poderia fazer ele se desgastar e dar pau rapidinho imagino eu, fora que mesmo que seja beem pequeno acho que o imã pode acabar soltando do volante e caindo lá dentro da caixa onde fica a embreagem e isso seria um problemão... A melhor ideia seria usar um um led receptor e um emissor IR? alguém tem alguma ideia do que podemos adaptar aqui para fazer a leitura?
-
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
então ela recebe o valor da leitura da porta analógica e multiplica por 2, esse 2 está aí para servir de base para quando terminar o código de leitura do sensor vai executar uma operação com um um numero X para nos dar a informação que queremos que vai ser a pressão de óleo por exemplo. por hora está assim: #include <Wire.h> #include <LiquidCrystal_I2C.h> #define tempo 1000 LiquidCrystal_I2C lcd(0x27,16,2); const int potenciometro =0; <====== aqui const int ou só int, funciona da mesma forma por isso a duvida. int valor =0; void setup() { lcd.init(); // INICIA A COMUNICAÇÃO COM O DISPLAY lcd.backlight(); // LIGA A ILUMINAÇÃO DO DISPLAY } void loop() { valor = analogRead(potenciometro)*2; //lcd.clear(); lcd.setCursor(0, 0); lcd.print(" valor ="); lcd.setCursor(0, 1); lcd.print(valor); delay(200); lcd.clear(); } Está funcionando, mas o display fica piscando, acho que o comando lcd.clear faz isso, estou pensando se tem como corrigir. Então provavelmente vamos acabar utilizando no código final, por falar nisso estava pensando se conseguiríamos usar uma informação para fazer mais de uma tarefa, precisaremos mostrar o ponto de ignição e a rotação do motor, para o ponto de ignição iria usar um sensor no volante do motor e para o RPM iria usar o hall do distribuidor. Mas o sensor no volante do motor pode fornecer também os pulsos para mostrar RPM além de servir para mostrar o ponto de ignição, dessa forma "economizamos" um pino interrupt e simplificamos a programação não é? -
LCD com informação dos sensores usando dois arduinos
GustavoH93 respondeu ao tópico de GustavoH93 em Eletrônica
Li sem compromisso e é interessante, eu aqui me enrolando com uma programação simples imagino quem realmente tem que fazer um projeto grande ou projetar um sistema operacional não deve ser nada fácil... Lembro que na empresa onde trabalhava ali para 2010 compraram uma máquina de usinagem CNC, era até colorido a telinha LCD, abrindo o painel da máquina na parte de traz era cheio de inversor de frequência, componentes e controladores e mais umas coisas que nem sabia o nome, não entendia nada daquele painel era até bonito só faltava fazer café... ConstANTE kkkkkk juro eu pesquisei antes de perguntar aqui mas não consegui entender, no google o que aparece é isso: A variável sendo declarada é um ponteiro, apontando para um inteiro constante. Efetivamente, isso implica que o ponteiro está apontando para um valor que não deve ser alterado. Como assim não deve ser alterado? Nesse caso a variável muda o tempo todo ela é a leitura do potenciômetro não consegui entender essa parte...Ainda mais que const int ou int deram o mesmo resultado aqui no código... Ahnnnn nem tinha lembrado disso, os pinos de interrupção não são afetados pelo delay, bom para simplificar a programação vamos trabalhar com os pinos de interrupção e delay, futuramente quando o código estiver mais completo e eu conhecendo um pouco melhor a programação podemos passar a usar millis(). Mas a função millis() usa mais memória e recursos do microntrolador do que a função delay não? Ou os recursos a mais que millis usa são quase desprezíveis?















Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
