

aphawk
-
Posts
8.316 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que aphawk postou
-
Não sei de onde estão vindo essas ideias absurdas de código GRAY, esquece isso de uma vez! Preste atenção ao circuito acima, é o seu problema resolvido, usando sensores infravermelhos reflexivos. Com apenas dois pinos de saída do microcontrolador, e um pino de entrada, você consegue ler os 16 sensores! Se, depois da explicação que dei sobre o funcionamento usando o meu circuito na página anterior, você ainda não sabe como fazer isso, me desculpe, mas a coisa está feia mesmo!

-
KKKKK normal ninguém reconhecer o mérito de uma solução. Cansei de passar por isso quando trabalhei no projeto de um IBM-PC XT industrial nos idos de 1985. Esses problemas de interferência de RF até hoje pragueiam um monte de boas ideias, já ví vários aparelhos ligados a rádios e computadores onde uma simples transmissão trava tudo, tendo de desligar e ligar de novo. E ainda tem quem compre aparelhos desse tipo ! Eu resolvi isso nos meus projetos usando isolação ótica e terras diferentes para não dar M.... Realmente temos muita coisa em comum, não sei qual de nós é mais pré-histórico, mas ambos somos dinossauros no mundo de hoje, aguardando o meteoro.... Mas com certeza eu sou mais velho, você programa em C , eu não consigo sair do Assembly e Basic kkkkkkkkkk
-
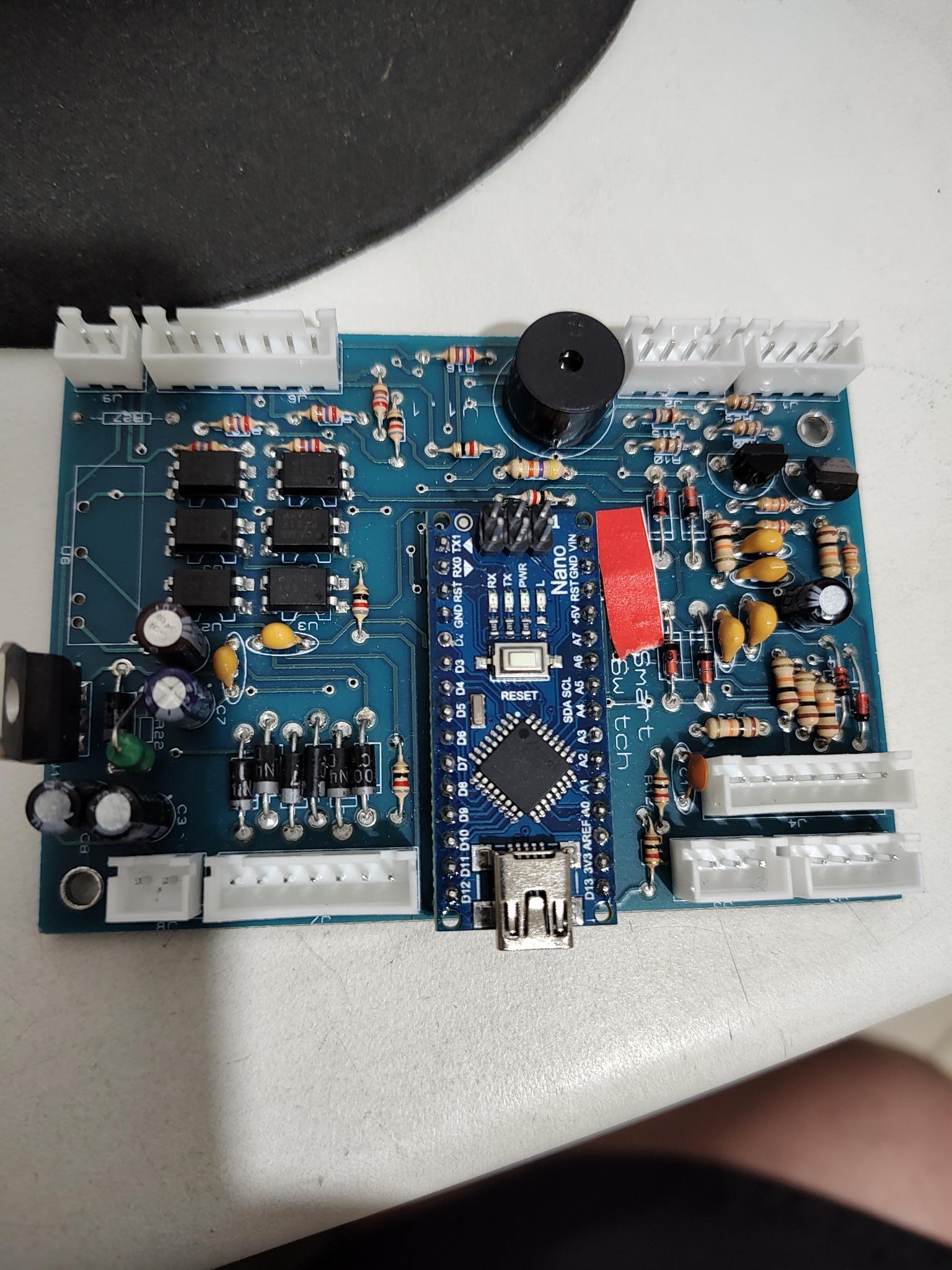
Segue a foto do novo chaveador : A placa que faz a comutação não tem nenhum led nela. Tem apenas os reles e as proteções Me explique melhor a sua duvida ....
-
Não, eu imaginei algo que poderia também sinalizar ao meu comando de rotor qual a a antena que estou usado. Os comandos de rotor que usamos recebem apenas a indicação do ANGULO que devem apontar, mais nada. Os programas usam a localização da estacao com quem estamos conversando , fazem o calculo, e determinam para quantos graus o rotor deve apontar. Mas, se temos várias antenas ligadas no mesmo rotor, e cada antena está deslocada uma da outra para não dar interferência, o rotor deve receber também uma informação adicional : QUAL A ANTENA QUE ESTAMOS USANDO, e a partir daí , sabendo quantos graus cada antena se desloca da direção principal, calcular a posição correta e apontar para essa direção.
-
O projeto já descrevi acima. RESPACK é um array de resistores de mesmo valor, fica fácil de montar e soldar. Vem de Resistor Pack KKKKK O U7 é um CI de 8 saídas usando transistores darlington, capazes de acionar relés que consumam 50mA para acionamento com 12V. O aparelho pode controlar até 6 antenas, indicando com Leds qual a antena selecionada. A chave MODO permite escolher 3 modos de funcionamento : Manual, automático e semiautomático. O modo semiautomático tem uma peculiaridade : a recepção se dá por uma antena DIFERENTE da de transmissão, isso é usado para quem tem antenas verticais multibanda. O botão pulsador é utilizado no setup da configuração. Ah, se olhar o circuito, vai ver que eu uso uma entrada analógica para detectar 3 posições da chave MODO.....
-
Certíssimo, meu velho amigo ! O problema é que isso está exposto a um forte sinal de RF. Imaginei que por algum ruído seja gerado um sinal de clock no 74HC595 sem ser o correto, A partir desse instante, a saída estaria totalmente dessincronizada 1 bit da saída desejada, selecionando antena errada e queimando a saída do transmissor por excesso de SWR. Ou a RF que chega forte no CI U7 pode acabar travando o 595 ..... achei melhor não arriscar. Eu juro que tentei não usar o segundo 595, mas achei um risco desnecessário por um CI tão baratinho. A saída do meu radio usa dois Mosfets de RF que custam mais de 300 reais cada um kkkkkkkk ! É o velho ditado : quem tem C...... tem medo , meu amigo kkkkk Achei melhor gerar um sinal de master reset ANTES de mandar a saída ..... @alexandre.mbm , Esse circuito é um chaveador inteligente de antenas. A grande maioria dos rádios tem apenas uma unica entrada e saida para antenas. E nós radioamadores sempre usamos um monte de antenas, pois nenhuma consegue trabalhar em todas as frequências possíveis. Então, somos obrigados a usar um antigo e obsoleto CHAVEADOR MANUAL , deste tipo aqui : É uma chave manual. ela precisa que eu esteja na minha estação para poder mudar. Agora, imagine que eu deixe minha estação de rádio ligada, configure o meu computador para acesso remoto, e queira usar a minha estação que está em São Paulo quando eu estiver no fim de semana em Itanhaém. Não tenho como mudar a antena ! Fico preso à antena que estiver selecionada na chave ! E se eu quiser usar uma outra frequência que essa antena não suporte ? não tem como ! Hoje em dia controlamos nossos rádios totalmente pelo computador. Podemos operar nos chamados modos digitais, como o FT8, FT4, RTTY, PSK, etc, tudo sem precisar falar no microfone, apenas usando o computador ! Então eu me informei e ví que todos os radios aceitam um ou outro protocolo de comunicação serial e por ele podem ser controlados totalmente pelo computador ! Resolvi bolar um aparelho que fique escutando a conversa entre o radio e o computador, e quando percebesse algum comando que muda a frequência de operacao do rádio, pudesse acionar a antena correspondente por meio de um relé adequado, tudo de forma automática ! E tal aparelho deveria trabalhar com os modelos e protocolos existentes, com os principais sendo da Icom, Yaesu e Kenwood ! Depois, percebi que poderia montar varias antenas na minha torre, cada uma apontando para uma direção diferente da outra, de modo a não interferirem no funcionamento uma da outra, e bolei um controle automático do rotor de antenas, o qual recebe também a informação desse chaveador inteligente, e corrige a informação do ângulo correto que a antena acionada está realmente apontando ! Isto faz um funcionamento fantástico, e é um conjunto imbatível no mundo inteiro, não vi nada que tenha esse funcionamento que eu acabei bolando. A partir daí, surgiu esse primeiro circuito, que é o que estou usando até hoje em minha estação. E com ele atualmente estou em primeiro lugar na America do Sul, e em quarto lugar no mundo, no concurso MARATHON. Isso, para uma estação modesta, no meio do Brás, em São Paulo, com tanto ruído elétrico, é quase um milagre ! Existe um novo aparelho que desenvolvi, este para venda, com opto acopladores, e por incrível que parece menor do que esse, mais barato, fazendo até mais funções, que desenvolvi no começo deste ano, com a diferença que toda a configuração de funcionamento é feita através de uma porta USB usando o próprio computador que controla o radio.
-
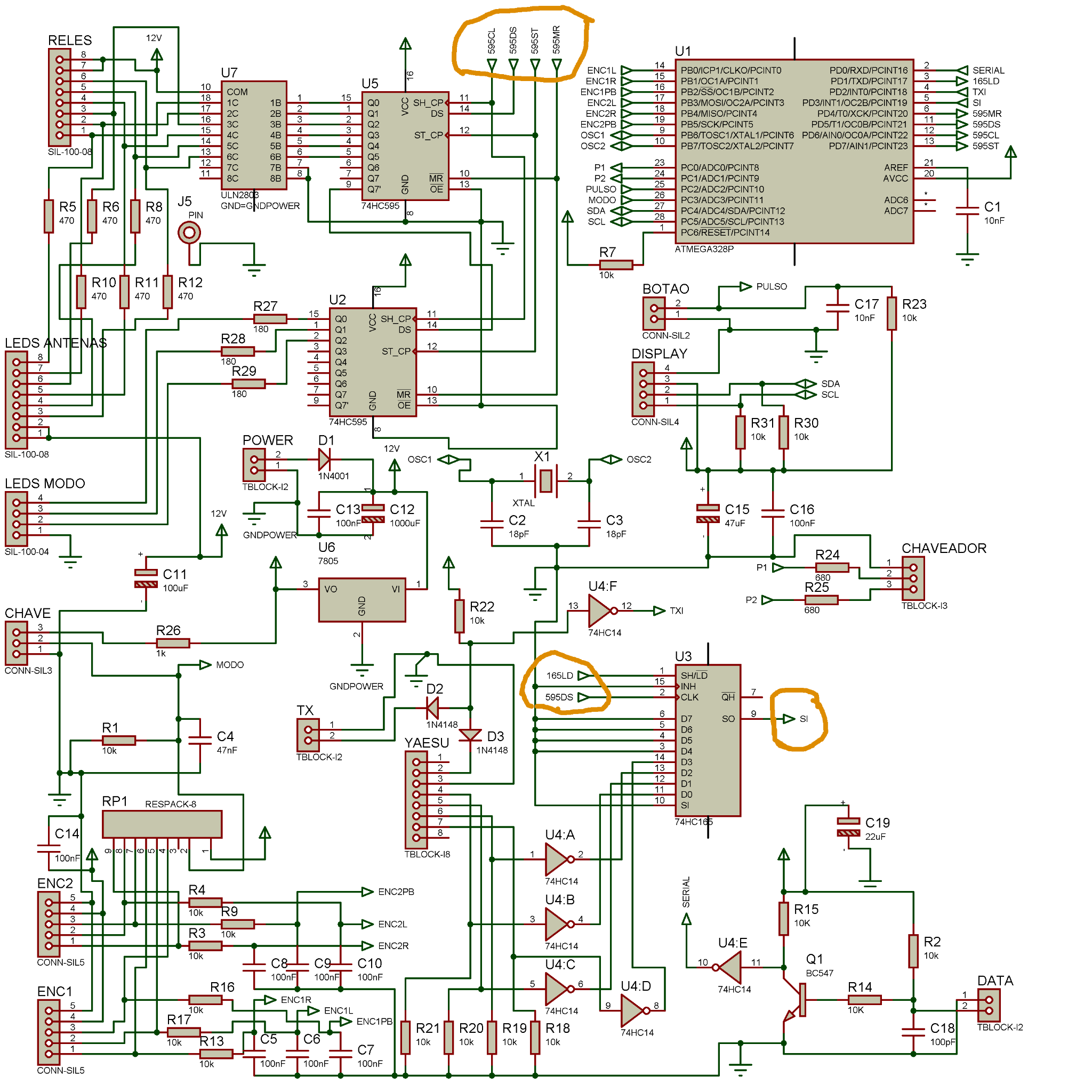
@alexandre.mbm , Realmente o nome nesse post CODIGO GRAY não tem nada a ver com o tópico kkkkk eu ignorei totalmente ! Eu me lembro que a finalidade desse código é alterar apenas um bit de cada vez, para facilitar a imunidade a ruídos, e eu nunca usei isso desde a faculdade kkkk ! Vou aproveitar e explicar aqui o funcionamento dos sinais no circuito que postei acima, agora pouco. Primeiro, a saída dos bits : 74HC595 O circuito integrado U5 é um 74hc595, entenda ele como um conversor serial para p[paralelo. A finalidade dele é receber os 8 bits de forma serial, e a seguir com um comando esses 8 bits aparecem nas 8 saídas, já em modo paralelo. A entrada serial é o pino 14, onde eu gero o sinal 595DS. Após esse sinal ser colocado no nível 1 ou 0, eu gero um pulso de clock no pino 11 do Ci, que é o sinal 595CL, com isso, esse bit já estra armazenado, e pronto para ser mostrado na saída. Porém, eu ainda tenho de mandar mais 7 bits ! Então, repito novamente o procedimento : coloco o nível do bit no sinal 595DS, gero um pulso de clock no sinal 595CL, por mais 7 vezes ! Com isso, todos os 8 bits estrão disponíveis nos 8 locais destinados para ele, MAS ainda não serão mostrados nas 8 saídas do CI ! Para que isso ocorra, é necessário acionar o sinal de LATCH, que envia esses 8 sinais para as saídas e armazena esses valores nelas, que é o sinal 595ST. Basta uma simples pulso e pronto. Agora, voltando ao meu circuito : eu tenho 2 desses 74HC595, encadeados, então não posso simplesmente mandar 8 bits e acionar a saída, tenho de mandas mais os bits que devem sair também no segundo 74HC595! No segundo, embora eu use apenas 3 bits, para facilitar o programa eu envio mais 8 bits, e finalmente aciono o sinal de latch 595ST. Nesse instante todas as 16 saídas são atualizadas ! Agora, a entrada dos bits : 74HC165 O circuito integrado U3 é um conversor paralelo para serial, e funciona de maneira reversa ao 74hc595. Com um pulso no sinal 165LD, eu armazeno o valor nas 8 entradas do 74hc165, e a cada pulso de clock no sinal 595DS, ocorre um shift dentro do CI, e o sinal presente no ultimo bit acaba saindo na saída do pino 9 do CI. Assim, para ler o valor dos 8 bits, eu faço um clock, leio o valor do bit, faco outro clock, leio o valor do bit, e assim sucessivamente para as 8 entradas. Se fosse necessário ler mais de 8 entradas, bastaria encadear mais um 74HC165, e dar mais 8 bits de clock ! Nada mais simples !
-
Para ajudar, segue um esquema de um dispositivo que montei em 2018, e continua funcionando em minha estação de rádio até hoje : Mostra o uso de 2 74HC595 para ampliar as saidas, e um 74HC165 para ler 4 entradas. Em cor laranja estão os sinais de controle para isso.
-
Certíssimo, Alexandre ! Eu estou no meu ambiente de conforto, Atmega328, Bascom, Proteus, e claro que faço isso faz bastante tempo. Já disse aqui várias vezes : o Proteus me permite desenvolver o produto inteiro em 20% do tempo que eu levava antes ! Só parto para o hardware depois de tudo testado virtualmente. Mas deixei claro que a equipe do TCC , mesmo usando as bibliotecas mastigadas do Arduino, vão ter bastante dificuldades, pois não me pareceu que eles possuem alguma experiência em programar no Arduino usando dados Seriais, e fazendo I/O de simples bit ..... Mesmo mais de um membro ajudando, e com certeza alguns de nós tirando algumas dúvidas para eles, devem demorar em torno de 30 dias SE tivessem 8 horas por dia para isto. Mas nada como a vontade.... eu ia de sábado o dia inteiro no laboratório da Mauá para ficar desenvolvendo, depois montando, depois debugando, e finalmente programando.... fiquei 5 meses fazendo isso porque meus colegas não me ajudaram em absolutamente nada.....
-
Bom, se ninguém te ajudar, você vai se ferrar. Simples assim. Se tiver de discutir, discuta e informe que você vai falar ao seu orientador que alguns membros não estão colaborando em nada, porque quem vai se ferrar no final é você. Você não vai achar essa parte mecânica prontinha com todos os detalhes, vai ter de procurar mesmo o básico e estudar aquilo que não lhe é informado já mastigado ! Sem sacrifício, não há recompensa, meu amigo ....
-
@Dan Henrique , Olhe as coisas pelo lado bom : vocês tem 6 meses para terminar o TCC. Isso é MUITO tempo ! Não se assuste com esse projeto, ele já foi feito várias vezes no passado, por vários grupos de alunos espalhados pelo mundo! Algumas horas de pesquisa våo te mostrar vários vídeos e documentos descritivos. Pensando na maquete, eu usaria sensores refletivos IR ajustados para detectar a presença do carrinho nas vagas, e usaria alguns sensores de fim de curso para detectar a plataforma nas posições corretas, em vez dos seus sensores de ultra-som. A parte eletrônica disso é bem simples, se faz em uns dois dias; o software disso também se faz fácil em menos de uma semana. Isso para alguém experiente. Para você ter uma ideia, eu estimo que se eu tivesse de fazer a eletrônica e o software, do zero, montando tudo em uma placa PCB tipo universal, dessas furadinhas, (estando com a parte mecânica definida e já montada com os sensores e o motor), e usando tempo integral, simulando tudo no Proteus (menos o RFID e o sensor de digital que não achei o modelo exato para simular diretamente, mas é bem simples de simular ambos usando terminal serial virtual), estaria tudo testado em menos de uma semana. E mais uns 2 dias para para integrar tudo na maquete e estar apresentável para os professores ! Claro que a minha experiência e conhecimento ajudam muito a reduzir os tempos , e sei que vocês vão demorar bem mais do que isso pois ainda tem muita coisa para aprender, fora os erros que serão cometidos kkkk ! Mas mesmo assim, em 30 dias vocês fariam isso com certeza, ainda mais em várias pessoas! Ou seja, é um projeto simples de ser feito por vocês, DEPOIS de definida e montada a parte mecânica ! Isso tudo significa que vocês tem tempo de sobra para pesquisar bastante na Internet, procurar por outros projetos semelhantes, aprender sobre o uso de correntes e correias, e bolar como tudo vai funcionar. Dividam as tarefas entre vocês, nem todos precisam pensar em tudo.
-
Eu tenho exatamente essa mesma limitação..... mas você foi o que mais ajudou nessa parte até agora ! Mas como você disse, a faculdade ( ou escola ) é que tem de ajudar nessa parte mecânica, senão não aprovaria esse TCC...
-
O funcionamento é mais automatizado do que você citou. O sistema tem a inteligência para encontrar a vaga de maneira automática tanto na chegada como na saída, usando o RFID para saber qual é o carro a ser descarregado. Quando você chega e deixa o carro, recebe o seu RFID. Quando você volta para pegar o seu carro, o seu RFID é usado tanto para saber onde ele estä, como calcular o tempo de armazenamento. E temos os sensores de uso das vagas também. Nesta maquete até o momento não foi citado que tem de ter um sistema que movimenta o carro para dentro ou fora do elevador para a vaga, creio que se tivesse mudaria completamente o tipo de TCC, pois a mecânica seria muito complicada para se justificar um simples projeto de Eletrônica. As maquetes que eu vi na Internet possuem uma mecânica bem simplificada, e serviam apenas para ilustrar a ideia, não sendo viävel na vida real. Lembro a todos que este é um TCC de Eletrônica, não de Mecatrônica ou Robótica, tem de ter uma mecânica bem simples apenas para ilustrar o conceito movimentando uma plataforma com um carrinho de plästico entre o chåo e as vagas.
-
Eita bicho malicioso kkkkkk ! Ficou boa a explicação com o código fonte ! Espero que sirva como motivação para os iniciantes, ver que a criatividade supera muitas limitações do hardware ! O que um único pino de I/O pode fazer, né ? Oras, você está se formando, então deve ter algum conhecimento, certo ????? O TCC é o seu primeiro desafio em sua nova profissão. A maneira que você o concluir vai te mostrar a maneira que você enfrentará os problemas que estão por vir na sua vida ! A escolha é bem clara, e todos nós tivemos de passar por ela também ! Aqueles que não quiseram enfrentar e aprender, logo desistiram da profissão e hoje trabalham em outras coisas. Aqueles que resolveram enfrentar, e aprenderam muito com isso, são aqueles que estão aqui hoje ajudando a muitos igual a você ! Por mais que algo te assuste, siga a orientação da nossa turma aqui no CDH, todos torcem por você, e todos irão te ajudar a ir solucionando. A mecânica é a parte mais chatinha mesmo, e essa parte eu sugiro que você encha bem o saco de seu professor para ele te ajudar a resolver. E claro, o @Sérgio Lembo conhece bem o assunto e está te ajudando bastante com isso ! O resto, da parte eletrônica, não é difícil, até o leitor de digitais é relativamente simples se você resolver fazer isso na linguagem do Arduino, tem bibliotecas prontas para usar. O RFID também tem exemplos de monte e bibliotecas também .... Acredite em você, mas você também vai ter de estudar e aprender, sem sacrifícios não conseguimos nada na vida !
-
@Dan Henrique, Por curiosidade , você está se formando em quê exatamente ? Esse projeto deve ser feito em uma equipe, não por uma só pessoa. A complicação é a mecânica, então eu suponho que você esteja em um curso do tipo Mecatrônica. Esse TCC é um excelente projeto onde vocês irão aprender muito, e é isso que vale para o mercado no qual você irá trabalhar. O sistema mecânico numa coisa envolvendo motores e sensores vai te ensinar muita coisa prätica, e trabalhar antes de se formar com leitora de digitais e RFID são um excelente diferencial em relação aos seus outros companheiros de formatura. Posso lhe garantir uma coisa : na parte de eletrônica você vai ter a ajuda necessária aqui neste Fórum, e na parte de software embora eu não saiba programar em C ou linguagem do Arduino, tenho bastante experiência com os Atmega328, e outros aqui podem te ajudar nas linguagens de alto nįvel. Sem dificuldades não existe aprendizado, lembre-se disso !
-
Sensor reflexivo ? ...... bom, para maquete vai funcionar. O sensor de ultrassom você pretende usar para indicar que a plataforma chegou no local exato.... mas ele pode também mostrar a distância ao carro e confundir a posição da base da plataforma..... vai ter de verificar dentro de um certo limite para evitar confusão. Agora, sensor biométrico ..... nunca usei um desses, mas creio que ele gera uma quantidade de informações para determinar a digital, e isso tem de ficar guardado em algum lugar. Vou dar uma pesquisada. A parte de eletrônica é simples, já o software envolvendo rfid e digital vai te dar um suadouro kkkkkkk A mecânica vai ser sua maior dificuldade.....
-
@.if , Já que foi você mesmo, meus parabéns !!!!! Merece mesmo, não é puxação de saco não ! Os sinais ST_CP e DS eu entendi na hora que ví os circuitos com constantes RC bem diferentes, mas o SH_CP os diodos me assustaram quando vi ..... Eu confesso que nem quis entender a geração do sinal SH_CP, eu apenas montei o circuito no Proteus e apliquei trens de pulso de duração variável e ví a "magia" kkkkk ! Aí eu entendi como gerar os sinais de escrita para atender o LCD. Eu havia pensado nisso quando citei que poderia usar um RTC nesse projeto, guardaria em uma EEprom externa ( I2C também para não complicar ) os dados de cada vaga, com o horário que o carro estacionou nela para posterior cobrança do estacionamento. Vaga sem horário estaria livre para uso ! Aí pensei também na segurança kkkkk já pensou uma Lamborguini estacionada e entra uma Ferrari na traseira dela por culpa do estacionamento ( e do sistema kkk ) ???
-
@Dan Henrique Os sistemas mais interessantes que eu ví usam 4 carros por andar, é o que permite uma melhor utilização de carros por metro quadrado. Alias, esse é um dos melhores exemplos que eu já ví de minimização, a geração dos 3 sinais é uma verdadeira obra de Engenharia, você já postou isso uma vez aqui no CDH e ficou devendo os fontes também kkkkk mas eu acho que o mais importante seria explicar como você está gerando os 3 sinais com os trens de pulsos, com um exemplo gráfico de timing seria ainda melhor, quem sabe alguém mais se impressiona com a técnica (como eu !), deixa o software de lado, pois eu acredito que aquele que entender a geração do sinal a temporização necessária para atender o LCD tem capacidade para escrever o software ! A geração do sinal SH_CP é sensacional kkkkkk ! É um dos poucos projetos que eu me curvo à inteligência do autor.
-
@.if , Olhe alguns exemplos : http://www.jornacitec.fatecbt.edu.br/index.php/VIIIJTC/VIIIJTC/paper/viewFile/1953/2669 https://www.youtube.com/watch?v=dWzVc1QEocA https://www.youtube.com/watch?v=Llv_iVJUf7c Eletrônica disso , com software e tudo, é bem simples. A complicação será na parte mecânica, independente do tipo de estacionamento vertical que se adotar..... mesmo com um só motor para elevar e descer a plataforma, vai precisar de sensores para o posicionamento correto em cada compartimento a ser utilizado, e me parece que até agora o nosso amigo @Dan Henrique não idealizou ....
-
@Dan Henrique , Minha pergunta foi sobre como você pretende controlar o motor para que a plataforma do veículo pare exatamente nos locais apropriados . Para isso é necessário algum tipo de sensor. Sobre usar os sensores de ultra-som tipo sr04, é melhor usar os CD4051, assim você seleciona primeiro qual o sensor você quer escutar o retorno, e faz o pulso de início comum a todos os sensores, e aguarde até 40 milisegundo pelo retorno. Depois disso você seleciona outro sensor no Cd4051 e repete o processo. Para usar até 16 entradas com 2 Cd4051 você vai usar 3 pinos do Atmega328 para selecionar, e mais dois pinos para receber o retorno ( primeiro pino recebe de 1 a 8, e o segundo pino recebe de 9 a 16 ). E tambėm pode usar 4 entradas que sobram para ler botões. Sugiro que pense muito bem no sistema do motor que você vai usar, e não esqueça que você precisa de algum meio de informar que a plataforma movida pelo motor está no local correto ! Se for um motor DC vai ter de escolher uma redução mecânica que abaixe a velocidade de rotação do motor para permitir o suave movimento da plataforma
-
@Dan Henrique , Para usar um motor DC você precisa de uma simples ponte H , assim você controla a velocidade dele gerando PWM ( se precisar ) e pode inverter o sentido de rotação também. A escolha do motor é fundamental para a escolha da ponte H. você entendeu o que significa um motor DC com redução ? Já pensou como você pretende posicionar os locais a serem acessados pelo motor ? Pretende usar um sensor de posição ?
-
Bom existem muitas maneiras diferentes de se fazer esse projeto. Não vejo necessidade de se utilizar dois processadores pois exigem dois programas rodando, e a troca de informações por interface serial, o que envolve uma complicação desnecessária justamente por ser muito mais fácil encadear shift-registers tanto para ampliar entradas como saídas. Se você definir 12 sensores de vagas : Com dois 74HC165 você tem 16 entradas, e dois 74HC595 você tem 16 saídas. Isso vai te ocupar no pior caso 6 pinos do Atmega328. Use um display LCD 16x2 ou 20x4 com interface I2c, você usou mais dois pinos. Se quiser ainda pode usar um módulo de relógio I2C para pode calcular quanto tempo a vaga foi ocupada. Usar um motor DC com redução mecânica é mais fácil de implementar, mas mais difícil de parar o elevador no ponto desejado. Eu iria de motor de passo justamente pela precisão na parada do mesmo. Para acionar um step motor, use um A4988 ou semelhante, usando 3 das saidas dos 74HC595. Ainda pode usar 4 botões nas entradas livres dos 74HC165. Creio que ė um bom começo para o hardware, e ainda tem vários pinos sobrando no Atmega328.
-
@Dan Henrique , Sensor IR você pode multiplexar 8 deles com um simples CD4051. Eu usaria dois desses CD4051, cada um indo para uma entrada do Atmega, e usaria mais 3 saídas do Atmega para selecionar uma das 8 entradas possíveis deles. Com isso, usaria apenas 5 pinos no total para até 16 entradas ok ? Se tiver sinais exclusivamente digitais e em um único sentido, pode usar shift registers para ler todas as entradas e usar alguns 74hc595 para fazer um monte de saídas também, assim usaria apenas 3 pinos para ler as entradas e mais 3 pinos para fazer todas as saídas..... exceto comunicação por I2C, Serial, Spi, etc .... O @.if se referiu ao PCF8573 , que é um CI que faz 8 I/Os em um único endereço I2C. Pode colocar até 8 deles, podendo fazer até 64 entradas ou saidas. Esse é o CI muito usado nos displays LCD 16x2 que aceitam comunicação I2C. E para outras soluções fáceis, veja aqui : https://dronebotworkshop.com/shift-registers/
-

Pré-amplificador eq. RIAA para cápsula cerâmica
aphawk respondeu ao tópico de rmlazzari58 em Eletrônica
@Renato.88, Eu entendi sim. O contrapeso faz o sistema de alavanca, onde o apoio do braço equilibra a gangorra. Mas isso significa mais resistência no esforço horizontal que a agulha faz em direção ao centro do disco, e isso altera a posição central da agulha sobre o sulco do disco, pois ela se move lateralmente no sulco e sente resistência ao movimento . O som acaba sendo alterado. A invenção do braço tangencial visava também atenuar esse efeito. -
Pré-amplificador eq. RIAA para cápsula cerâmica
aphawk respondeu ao tópico de rmlazzari58 em Eletrônica
Isso diminui a qualidade do som. Aumenta o peso estático do sistema, aumentando o atrito no eixo. A agulha tem uma massa maior para mover, e acaba abafando um pouco a amplitude dos movimentos na agulha, tornando o som com menos dinâmica. É só fazer o famoso teste da moedinha como contrapeso.






Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
