

Sérgio Lembo
-
Posts
3.041 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Fabricantes
Livros
Cursos
Análises
Fórum
Tudo que Sérgio Lembo postou
-
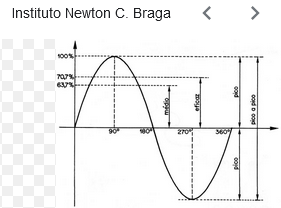
Sério? Numa onda senoidal 311Vp = 220VACrms. Isso é facilmente comprovado com a utilização de voltímetro + 1 diodo + 1 capacitor que armazene o valor de pico. Pelas suas contas os 311Vp teriam um valor médio de 99V e 44.5VACrms. Não sei o que está fumando mas troque de fornecedor. Tá mofado.
-
@Ismael Garcia Dada a sua insistência me dei ao trabalho de pesquisar. Os resultados que obtive são coerentes com a imagem acima. Por favor, poste os links que dão suporte à sua pesquisa.

-
O desenvolvimento do raciocínio acima apresenta inconsistência. você dividiu a energia aplicada ao resistor por 2 ao inserir o diodo mas aplica o valor 1.41 para calcular as consequências. 24VACrms = 24Vdc retificados com capacitor, onda lisa com 24Vp para o mesmo efeito térmico e = 24Vdc retificados onda completa cvom 33.92Vp Temos 24VACrms = 32.92Vp para um formato senoidal. Note que ambos os valores são equivalentes. Desprezando a queda do diodo, quando se faz a inserção de 1 diodo é o mesmo que dividir a equação por 2.
-
Eu nunca fiz a experiência proposta pelo tópico mas, até onde sei, o conceito RMS é térmico, isto é, o valor RMS de um valor não uniforme no tempo é o mesmo que um valor contínuo para produzir a mesma quantidade de calor numa mesma resistência. Caro @MOR_AL , uma tensão contínua modulada com PWM em 50% nos dará, creio eu, Vp/2 para tensão média e, por ser quadrada, Vp/2 para tensão RMS. Desprezando as quedas do diodo fica difícil igualar uma onda senoidal com uma quadrada. @Ismael Garcia Sendo o conceito térmico, quando usa apenas a metade a consequência térmica será a metade. Olhando para o aquecimento de uma resistência que recebe uma tensão senoidal, retificada ou AC, tanto faz, o que se tem no tempo é uma relação quadrática entre a tensão e o aquecimento pois: P = U^2 / R, o que nos dá a raiz de 2 (1,41) para relacionar o valor de pico com o eficaz no formato senoidal, vem da trigonometria. Para o pensamento RMS o raciocínio é sempre térmico, isto é, aplicado numa resistência pura, sem indutâncias ou capacitâncias. Um resistor não distingue uma tensão DC uniforme de uma AC senoidal ou de uma DC pulsante, seja este pulso resultante de uma retificação total, meia ou PWM. A referência é a tensão contínua uniforme aplicada ao resistor e para outras formas de onda um bom voltímetro true RMS nos dará o valor equivalente.
-

Mosfet gate driver com totem pole x push pull
Sérgio Lembo respondeu ao tópico de Valdir Tech em Eletrônica
O mosfet PJW7N06A possui uma resistência menor, por consequência uma capacitância maior no gate. Se está aquecendo mais é porque o acionamento dele está muito lento. Localize a resistência de gate na placa e substitua-a por uma entre 1/3 e a metade do valor. Verifique também a tensão de gate aplicada. Por ter um VGSth um pouco mais elevado o PJW7N06A vai pedir um pouco mais de tensão mínima para ter um bom performance. -
Mosfet gate driver com totem pole x push pull
Sérgio Lembo respondeu ao tópico de Valdir Tech em Eletrônica
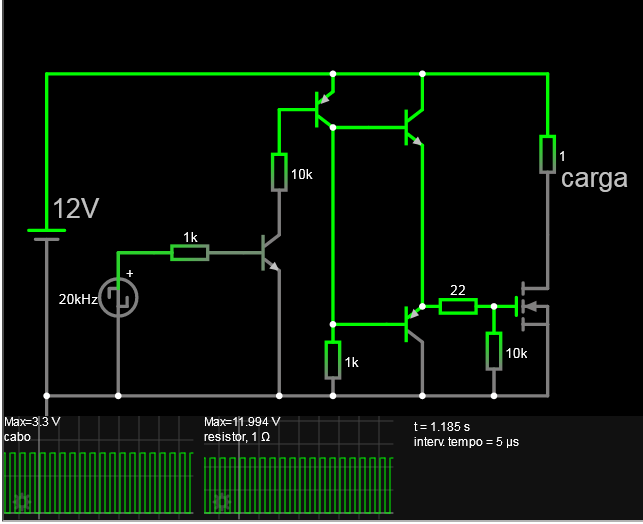
Alguns erros para quem deseja comutar mosfet de potência: R37 está sobrando, o ato de acionar um mosfet tem um pico de corrente elevado e a existência do R37 derruba o performance. C26 é bom mas pense em 1uF cerâmico. O desenho está correto mas esqueceste de elevar a tensão do controlador de 3V3 para 12V, basta adicionar 1 transistor e 1 resistor. O segundo resistor de 1k, pense em 1/2W. Aquece e não é pouco. Para os 2 transistores de saída tem uns modelos de 800mA. São os mais adequados.
-
VisualG Listar compras sem utilizar vetores
Sérgio Lembo respondeu ao tópico de Eli Almeida em Programação - iniciantes
Que desserviço ao ensino. O ensino de informática possui 2 pontos: ensinar lógicas de manipulação de dados que atendam a demanda e a linguagem utilizada. Quando se faz o ensino utilizando if, while, read se está ensinando ambos. Quando se adota esse nacionalismo idi*ta isso força o programador a ter que traduzir os termos escolares (se, senao, escreva1) aos reais utilizados na prática. Tive a sorte de não ter ideologia nos meus tempos de escola. Lamento pelo novos. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
Sim. E bom pra dias nublados. Em dias ensolarados pode esquentar mais as placas o que fatalmente reduz sua vida útil que se estima em 20 anos (uma das minhas já + de 10). Há ainda a questão do granizo que raramente cai mas... já ouviu falar em murphy? Mas a ideia do espelho continua sendo boa pra aquecimento de água o qual aliás está nos meus planos de melhoria (já possuo aquecedor tipo diy) Sobre o vidro, integrante do espelho. Pelo que sei ele não é transparente ao infravermelho (calor). Por ser espelho, fica a dúvida se este é refletivo ao infravermelho, algo a ser pesquisado na literatura ou teste de campo. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
@.if O programa de avaliação de posição apresenta um possível problema: desejar uma precisão de 1LSB talvez, dependendo do range de trabalho, possa resultar num sistema instável. Os valores de igualdade irão variar muito dependendo da insolação do momento. Assim sendo anote como possível necessidade de melhoria uma tolerância percentual e não de valor fixo para a parada do motor. Experimentalmente adotei 4% para cada lado. O valor final será definido no campo. Simulador é que nem papel, aceita tudo, inclusive 2+2=5. aD=adc_read(0); aE=adc_read(1); DIREITA=ESQUERDA=0 if (m1x) { if (aD<aE*25/24) {DIREITA=1;ESQUERDA=0;serial_texto("Motor ESQUERDA ");} if (aD>aE*25/24) {DIREITA=0;ESQUERDA=1;serial_texto("Motor DIREITA ");} serial_texto("AN0=");serial_decimal(aD); serial_texto(" AN1=");serial_decimal(aE); } { if (DIREITA+ESQUERDA==0) { if (!m1x) //sรณ tx se mudou { serial_texto("Motor PARADO AN0=");serial_decimal(aD); serial_texto(" AN1=");serial_decimal(aE); tx(13);//pula linha tx(13);//pula linha } m1x=1; } } E já que a intenção é um melhor aproveitamento da placa solar, fico me perguntando se a instalação de espelhos inclinados nas laterais das placas não aumentaria a energia produzida por dia. O lado ruim dessa ideia são os ventos. Dada a tolerância inverti a sequência. Caso nenhum dos gatilhos de movimento seja acionado ELSE motor parado. Não entendi a variável m1x, talvez com a inversão proposta tais comandos necessitem de correção. Talvez haja umas chaves a mais ou a menos, fiz a inversão no CrtlC CrtlV. Abraços. -
Tiristores em anti-paralelo em sistemas de regulação CA
Sérgio Lembo respondeu ao tópico de Deyvid_Bahia em Eletrônica
Se tiver 2 bolachas de 500A em anti-paralelo então cada braço suporta 1000A. Não entendi 2 fusíveis de 500A ao invés de 1 único de 1000A e considero pouco provável que o formato NH, que é de faca, seja adequado para esse nível de corrente. Nessa corrente a fixação por parafuso é a mais adequada.
-
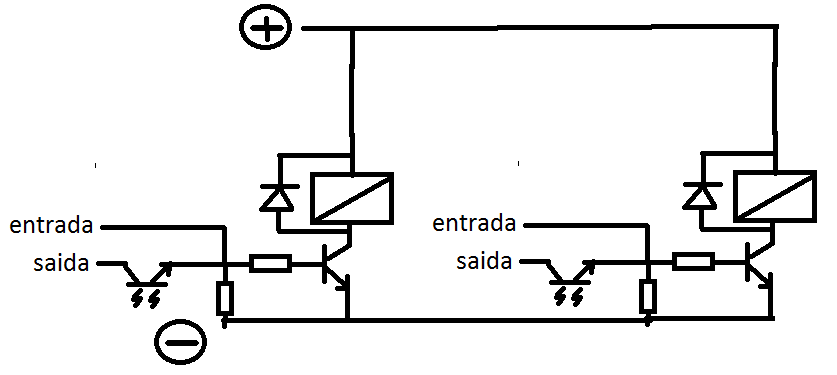
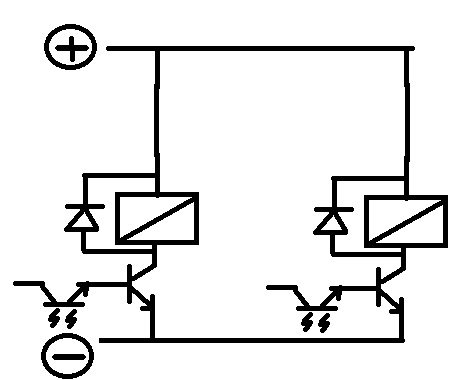
Caso esteja utilizando mc com fim de curso mecânico, um divisor de tensão entre o fim de curso e o relé te dirá se houve ou não acionamento. Caso seja fototransistor, muda um pouco:
-
Caso utilize sensor fotoelétrico o circuito muda um pouco.
-
Tem para todos os gostos e bolsos, trabalhei muito com isso. É necessário uma imagem do projeto mecânico para ver qual melhor se adapta.
-
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
O ímã de neodímio é uma cerâmica sensível a choque e a umidade. A cor prata da aparência é uma caixa de níquel. Faz a proteção mecânica e selagem contra umidade. Níquel é um excelente condutor, usado com frequência no revestimento de contatos. Ao grudar na placa onde ficou colocou tudo em curto. Na próxima montagem pense numa caixinha plástica para proteção da placa. -
Tem 2 tipos de queda: a que dura muito tempo e aquela em que a rede dá uma rápida piscada por conta de manobras na subestação. Para essas piscadas rápidas, um simples nobreak dá conta.
-
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
Foi desenhado para IoT. É excelente para a aplicação ao qual se propõe. Quem o adquire vai querer fazer IoT e a aplicação os usa na integralidade, não sobra nada para outras aplicações. Mas dá para ligar relés a distância e outras coisinhas através das GPIO e também possui I2C para conversar com outros mc. É um bom produto para IoT. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
@.if Tem apenas 1 timer. Suficiente para IoT mas apenas isso. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
Para IoT o Esp é imbatível no custo. Mas olhou o Timer dele? Muito restrito. Para esse uso fica fraco demais. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
@GustavoH93 O I2C é serial sim mas o 328P tem seu motor dentro, não necessita usar o timer para controle. Na rotação máxima, 3000RPM, teremos 25 passagens do Hall por segundo. No intervalo dessas passagens o 328P consegue realizar mais de meio milhão de instruções. O que mais temos é tempo. Faz questão de utilizar o Arduíno? Ele tem apenas 1 Timer de 16 bits e pelo que entendi pretende utilizá-lo para fazer PWM. Que tal um processador ARM de 32 bits por um preço mais baixo? O Arduíno utiliza o processador AVR de 8 bits. Qualquer número maior que 255 gera uma baita ginástica. Se for de ponto flutuante (float, número com casa decimal) a coisa deixa de ser ginástica e passa a ser academia. você está fazendo instrumentação, isto é, regular uma função a partir de dados recebidos por sensores. Um ARM M3 possui ponto flutuante, isto é, capacidade de realizar contas com valores decimais muito mais rápido. Além disso os 32 bits possibilitam contas com valor de até 4 bilhões em apenas 1 clock. Possui, além dos timers colocados pelo fabricante um timer da CPU de 24 bits para as funções de sistema que necessitem de temporização. Então ficam todos os demais timers disponíveis para o seu programa. Também possui DMA, um recurso avançado que na medida em que você for evoluindo vai te facilitar e muito a vida. E tudo isso a partir de R$30,00, mais barato que o Arduino. Terá que comprar a placa de programação, o STLINK, mas é barato, uns 30 e serve para todos os STM8 e STM32. E ainda consegue utilizar a IDE do Arduino. O modelo STM32F103 te dá a partir de 32kb de programação, 3 timers de 16 bits, todos com capacidade de PWM além de outros de 8 bits. Possui um clock de 72MHz, dá até para abaixar isso sem comprometer a performance necessária ao seu projeto. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
@.if O projeto acima fica melhor se feito por um STM8 ou STM32. Nos 32 bits já se tem uma facilidade maior de lidar com grandes números. Com 8 bits também dá mas uma simples conta que tenha um valor > 255 faz a CPU dar muita volta, o código de uma só linha quando compilado gera muitas linhas de assembler. O bom do STM8 e STM32 é que vem com muitos timers, dependendo do modelo mais de um de 16 bits. Deixa-se o Timer1 para o sistema e usa-se o Timer3 (ambos são de 16 bits com 4 canais de capture/compare) para monitoramento da rotação. Sobre o uso do interrupt para evitar a paradinha, ao invés de usar o interrupt externo fazer com que o capture gere a interrupção, fica muito mais precisa a leitura. Uma correção: parece que os bits das flags para serem resetados tem que escrever 1 neles. Deixo esse refinamento para o interessado. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
@.if O registro TIFR1 é das flags e foi zerado na inicialização. Ele contém o capture e o overflow. O overflow é o bit zero e o capture é o bit 5 do registrador. O overflow do TIMER1 tem o nome de TOV1. Talvez uns códigos dentro do while para verificar se não houve disparo do overflow, tal como: if TOV1 { rotina de motor parado }; -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
Medir o período é mais eficiente e preciso, principalmente quando se usa o capture do Timer1. Vai ter o controle muito mais preciso, giro a giro. Esperar 1 segundo para fazer contagem é tempo demais. São 2 as funções que o Timer1 irá executar quando estiver rodando o programa: controle da rotação e controle do display se não estiver utilizando um display I2C, for daqueles mais comuns 16x2 sem módulo I2C. O envio de dados tem que ter a velocidade monitorada para funcionar. Assim sendo a configuração do Timer1 será feita dentro da função de medição para reparar outras interferências que a biblioteca do display e outras que utilizam o Timer1 possam ter realizado. TCCR1A = 0; // Seta modo de operação do Timer1 TCCR1B = 5; // Seta Capture para borda de descida e preescaler para divisão por 1024 TCCR1C = 0; // Seta modo de operação do Timer1 TIMSK1 = 0; TIFR1 = 0; // Inicializa flag do capture while !TIFR1{ // Aguarda passagem da marca para iniciar contagem de tempo }; TCNT1L = 0; // zera contador TCNT1H = 0; TIFR1 = 0; // Inicializa flag do capture while !TIFR1{ // Aguarda passagem da marca para fazer contagem de tempo }; sua_variavel = TCNT1; // Armazena tempo na sua_variavel Note que dividi o clock do Arduino por 1024, em 16MHz isso significa que cada contagem equivale após a divisão a 64us. Não tive que aguardar por 1 longo segundo para fazer contagem, bastaram 1 giro + o que faltava para completar 1 giro, o que nos dá um máximo de 2 giros para realizar a tarefa. Pelo dito acima pretende fazer atuação quando aos 3000RPM. Fazendo as contas isso significa que se a passagem levar menos que 20ms o motor estará com rotação elevada. No nosso contador 20ms / 64us = 312 contagens. Leia atentamente o Timer1 do processador 328P, pode ser que eu tenha esquecido de algum ajuste extra. Aqui o link do processador 328P Esqueci de inicializar a sua_variável. Coloque-a no início do programa para ser global. Lembre-se que será uma variável unsigned de 16 bits. Faça também uma constante. c_rpm = 937500 Dessa forma, quando quiser indicar o RPM para o display rpm = c_rpm / sua_variavel -
Ligação de motor de esteira sem placa eletronica
Sérgio Lembo respondeu ao tópico de Marco Aurelio Trigueiro Az em Eletrônica
Creio que está se referindo à configuração do motor universal ou motor série ou motor de torque, onde o campo fica em série com a armadura. Não é qualquer motor em que a bobina do campo aceitará a corrente de armadura, normalmente o bobinamento do campo é feito com calibre muito mais fino, são motores com bobinamento específico para essa aplicação. -
Ligação de motor de esteira sem placa eletronica
Sérgio Lembo respondeu ao tópico de Marco Aurelio Trigueiro Az em Eletrônica
Campo é campo. Se formado por eletroímãs ou por ímãs permanentes é um detalhe que não altera o funcionamento. A propósito: já viu a forma de onda da corrente do campo em motores de 1cv ou mais? A indutância é tanta que é uma linha reta, se for olhar na linha AC fica uma onda quadrada. O circuito postado funciona bem com triac, scr fica ruim. -
Controlar válvula Borboleta de acordo com RPM (Programação Arduino)
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
Medir frequência e período é a mesma coisa exceto por um detalhe: o micro mede período, a frequência tem que calcular. Então monte seu raciocínio pelo período e terás mais eficiência. Faça o cálculo de RPM apenas quando for exibir o RPM no display.




Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
