

Sérgio Lembo
-
Posts
3.174 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que Sérgio Lembo postou
-

Dá para usar transistor como chave para substituir um teclado?
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
Dá para colocar resistores mais elevados na base se desejar, por exemplo 47k. -
Defeito em placa inversora ADW01 para esteira
Sérgio Lembo respondeu ao tópico de jaildo lode em Eletrônica
A frequência de chaveamento dos IGBTs não é muito alta. Possui um osciloscópio, mesmo que simples? Verifique se sai o PWM do processador, se positivo verifique se o driver entrega o PWM no gate do IGBT. -
3060 12 gb ou 4060 8gb da gargalo num i5 10400?
Sérgio Lembo respondeu ao tópico de Arthurap5 em Placas de vídeo
A força de uma corrente é o seu elo mais fraco. Num jogo temos as decisões lógicas do jogo e o processamento das imagens. As decisões lógicas são da competência da CPU, não tem para onde correr. Quando se usa o processador gráfico da placa, por não possuir memória própria já se tem uma queda de performance pelo compartilhamento da memória. O que pude observar em games é que quando a placa de vídeo não dá conta cai o FPS e por vezes até a resolução gráfica. Sobre a CPU ter ou não performance para determinado jogo a presença da placa de vídeo não irá piorar uma eventual limitação. Impressionante a quantidade de memória já instalada, 24GB e vai para 32GB. A máquina com maior quantidade de memória que já vi tem 16GB de RAM, roda diversos programas gráficos simultâneos (pré produção de gráfica) e a demanda nunca superou os 12GB. O mundo gamer é um caso bem a parte. -
3060 12 gb ou 4060 8gb da gargalo num i5 10400?
Sérgio Lembo respondeu ao tópico de Arthurap5 em Placas de vídeo
Se vai dar gargalo? Muito pelo contrário. Ao detectar a presença da placa de vídeo o peso de processar as imagens é transferido para a CPU da placa de vídeo, sua CPU principal fica com mais tempo livre para outras tarefas. Também diminui a demanda sobre a RAM principal por usar a memória da placa de vídeo no processamento de imagens. -
É possível sim desde que a lâmpada seja de corrente contínua. Vai necessitar também de alguns transistores para chavear esse mosfet. Utilizar o opto com resistores para comandar o gate funciona bem em frequências muito baixas. Esse mosfet possui uma capacitância de entrada de 1nF quando original, se for asiático o céu é o limite. Será necessário um mínimo de 3 transistores para construção de um gate driver ou a aquisição de um gate driver low side. Caso a lâmpada seja de 24V adicione + 1 regulador bem simples de tensão de 10V a 15V ou a construção deste (1 resistor + 1 zener + 1 capacitor). O transistor selecionado é antigo. Existem mosfets com entrada logic level bem mais amigáveis de se comandar.
-
Desafios e Conquistas: Projeto com o Sensor SHT85 e Arduino
Sérgio Lembo respondeu ao tópico de andreischuck em Eletrônica
@MOR_AL e @.if Fico pensando se o autor não se esqueceu dos resistores de pull up. Com tanta complexidade para quem faz pela primeira vez uma distração dessas acontece, por ser simples não se dá a devida atenção. -
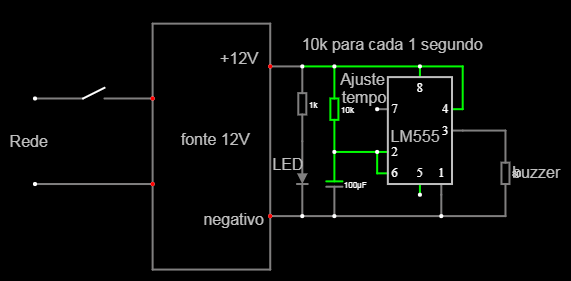
Não. O buzzer inicia apitando no volume máximo e vai reduzindo de volume a medida em que o capacitor se carrega. O circuito da @.if é o mais barato e fácil. No desenho abaixo os componentes também são baratos mas vai precisar de uma pequena (a menor que achar) placa ilhada para montar os componentes. A vantagem desse circuito é o volume de som ser constante durante o tempo. O consumo máximo do buzzer para este circuito é de 200mA. Para consumo maior será necessário a adição de 1 resistor e 1 transistor.

-
Mosfet que seja semelhante ao K391 KS GZ
Sérgio Lembo respondeu ao tópico de Henrique - RJ em Eletrônica
Complementando a resposta do @aphawk Notaste que próximo ao mosfet tem uns resistores minúsculos? Eles irão receber o mesmo sopro de ar quente que o transistor, certamente a solda deles também irá derreter. Para sairem voando ao infinito e além não precisa de muito. Se for para praticar, treinar e aprender use uma placa velha qualquer de um produto descartado, sem valor. Vai perder muitas peças até aprender mas não perderá placas que ainda tem valor. -
Mosfet que seja semelhante ao K391 KS GZ
Sérgio Lembo respondeu ao tópico de Henrique - RJ em Eletrônica
Consegue identificar o fabricante pelo logo? Tá difícil só pela informação prestada. Vai ajudar também se falar da aplicação e da corrente que estima estar passando sobre ele. Olhe melhor para o componente e veja se não é o K3918 KS, marca para o transistor 2SK3918? -
Qual transistor devo usar para chavear 12V/10A?
Sérgio Lembo respondeu ao tópico de luizm_fernandes em Eletrônica
O mosfet IRF1404 é uma boa pedida dependendo da aplicação. Vai aquecer pouca coisa, uns 30ºC acima da ambiente sem necessidade de dissipador. Nada é gratuito: para elevadas frequências irá necessitar de um bom drive mas se for para acionamento de um solenóide com baixas frequências um acionamento simples de baixíssimo custo dá conta. -
Ideias para sistemas de energia autônoma, micro termelétrica de até 1000W
Sérgio Lembo respondeu ao tópico de albert_emule em Eletrônica
Mudar a rotação entre a geração e o consumo sempre fez parte, são poucos os projetos onde isso não é necessário. Tem uma coisa que me incomoda: Nicola Tesla imaginava que a grande eficiência se daria com geradores com muitas fases. A prática demonstrou que os trifásicos dão a melhor resposta com ênfase para o trifásico de 4 polos. Pelo muito que nos deu não vamos desmerecê-lo por não acertar em todas. Motor e gerador se diferenciam pelo objetivo, a construção pouco difere. Quando queremos baixas rotações produzimos motores trifásicos com 6 ou 8 polos. O rendimento cai mas nem sempre compensa uma caixa redutora. Se nos projetos eólicos a rotação é naturalmente baixa por qual razão não se constroem geradores trifásicos com muitos polos? O que tenho visto são máquinas de muitas fases, muito evidenciado por não possuirem uma quantidade de bobinas em número múltiplo de 3. Fica essa pergunta aos que conhecem bem o magnetismo, uma ciência difícil por trabalhar com muitas unidades (permeabilidade, etc). -
Ideias para sistemas de energia autônoma, micro termelétrica de até 1000W
Sérgio Lembo respondeu ao tópico de albert_emule em Eletrônica
Acho tudo isso interessante, em especial para os nordestinos. Reparem no sotaque do cara do vídeo. Lá é região conhecida pelos ventos constantes, também me animaria se lá morasse. -
Projeto: ajuste de histerese em comparador sem (muito) cálculo
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
Sobre usar a referência interna do Attiny: essa referência possui uma exatidão de 10%, vai ter que fazer uma rotina de calibração para descobrir o exato valor da referência. -
Havendo um furo na chapa metálica, se por este passar um fio com corrente AC (tem que haver consumo, corrente zero não provoca indução) haverá um discreto aquecimento na borda do furo. Caso passem os 2 fios de alimentação AC por este furo não haverá aquecimento, a soma vetorial dos campos magnéticos será zero.
-
Projeto: ajuste de histerese em comparador sem (muito) cálculo
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
Em termos didáticos, mesmo que o uso inicial não justifique o esforço dá para aprender e muito. Attiny é uma família baseada no processador AVR, o mesmo que equipa o Arduíno. Clocks abaixo de 1MHz provocam algumas falhas nele mas nesta frequência o consumo cai e muito e se a alimentação for a mínima a corrente cai mais ainda. Não é um desafio que necessite de muito desempenho (tanto a carga quanto a descarga são fenomenos lentos) de sorte que ficar cochilando (sleep) na maior parte do tempo e a cada 2 ou 5 segundos realizar uma inspeção irá poupar e muito a bateria. Com um investimento extra tem uns CIs dedicados ao intento de baixíssimo consumo mas no uso da técnica de sleep aprende-se muito mais. -
Pc funciona por 20~60 minutos e depois desliga a tela
Sérgio Lembo respondeu ao tópico de tatakae1995 em Computador desligando sozinho
Isso parece ser aquecimento. De vez em quando tiro a tampa lateral do meu PC e levo ao borracheiro vizinho para um banho de ar. Sai muito pó. Lendo melhor o tópico, diz ser instalação recente. Isso descarta o pó. Monitore a temperatura do processador. Continua com cara de aquecimento. -
O bom do isopropílico é que não deixa marcas, excelente para limpeza de lentes. Outra vantagem é que espalha melhor. Para a sua finalidade teste o etílico. Confesso que nunca usei o etílico fora do copo mas toda a tentativa é válida. Sobre o risco de provocar oxidação, fique tranquilo.
-
Projeto: ajuste de histerese em comparador sem (muito) cálculo
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
Nos comparadores e até mesmo nos operacionais quando em malha aberta costuma haver uma histerese embutida de poucos mV (uns 5). É um efeito colateral do circuito, nem todos apresentam isso. Na sua aplicação o uso de histerese por realimentação positiva deve ser considerada. Tanto na carga quanto na descarga dessa pilha a passagem pelo ponto de comparação será extremamente lenta para os padrões da eletrônica. Isso significa que quando a tensão da pilha estiver a uns poucos mV ou uV do ponto de comparação a saída tenderá a entrar em alta frequência. Quando se tem realimentação positiva na primeira variação da saída o operacional/comparador já fica travado no novo valor. Relé é lento, o transistor vai ficar cozinhando na região ativa com entra e sai desenfreado sem que o relé consiga atracar. Outra forma de se segurar essa oscilação é colocar um pequeno capacitor entre a saída e a entrada inversora. Nesse caso terá que colocar um resistor de ao menos 10k entre a pilha e a entrada inversora. Sobre o consumo do circuito sobre a pilha: No datasheet é informado o valor típico e máximo de corrente consumido pelas entradas. Quando se deseja boa mas não exagerada precisão a corrente que passa pela malha deve ser de ao menos 100X o consumo máximo da entrada. Caso o consumo te seja muito crítico dá para trabalhar com 10X o consumo máximo. Lembre-se que o consumo típico costuma ser muito menor que o máximo. No caso do LM393 estamos falando de 25/100nA, Então um consumo de 10uA na malha já nos dará a precisão boa ou 1uA para uma precisão menor. Usar 140uA é um exagero, só faz sentido se houver muita interferência. Estou falando de integrados americanos, europeus ou japoneses. A atual qualidade dos integrados chineses me faz lembrar os produtos japoneses da minha juventude. Foram muitos anos até que aprendessem a trabalhar bem o silício. -
Máquina eletrônica para soldar ferro - IGBT
Sérgio Lembo respondeu ao tópico de MOR_AL em Eletrônica
Vou tentar puxar da memória, fazem 40 anos. Não haviam lente eletrônica, usava-se a lente grossa vermelha. Mesmo sob forte sol não se consegue enxergar através delas. Havia uma solda a ser feita e o mecânico estava ausente. Peguei uma chapa de sacrifício e fui treinar. Não consegui abrir o arco, o eletrodo sempre colava. Quando desisti não sentia nada. Depois veio a forte irritação/coceira/ardência nos olhos. Busquei auxílio médico e me receitou o colírio de Eufrásia. É um anestésico. O risco apresentado é que não se pode coçar os olhos sob efeito do colírio. Se houver uma pedra nos olhos ou ramela seca/endurecida (dá na mesma) durante a coçada há o risco de se cortar os olhos sem nada sentir por conta da anestesia. A Lei de Murphy é terrível. Quando não se pode coçar é quando se tem mais vontade. No dia seguinte estava bom, sem efeitos colaterais. -
Máquina eletrônica para soldar ferro - IGBT
Sérgio Lembo respondeu ao tópico de MOR_AL em Eletrônica
Sobre fazer solda, a única coisa que consegui aprender sobre o tema foi o colírio de Eufrásia. Queimei minha vista e nunca mais me aventurei com solda a arco. Caro @MOR_AL : li, de forma rápida, seu PDF anexado. Não entendi a preocupação com a tensão nas suas considerações. Vejo o TC como uma fonte de corrente com VA limitado e com o VA nominal sendo válido para 100% da corrente nominal. Assim sendo, num TC de 100A/1A de 5VA quando a corrente for de 20A terei apenas 1VA disponível. Isso explica o porque do TC não te dar resposta em baixas correntes quando se usa ponte de diodos, a carga representada pelos diodos come a potência disponível pois, se nos diodos perdemos cerca de 1.6V teremos ali 1.6VA por ampere. TCs com 5VA de saída são os grandes, industriais pesados e caros. Para estes pequenos de poucos VAs de saída o uso de diodos é um tiro no pé. Como dito em comentários anteriores, são feitos de fio fino, alta resistência interna. Só nessa resistência série equivalente já se vai grande parte daquilo que o circuito magnético consegue produzir de potência. O uso de um shunt de baixo valor é sempre a saída, sem diodos. Para lidar com o AC, uma boa técnica é um amplificador diferencial com a REF a 1/2VCC do circuito mais um GND virtual no mesmo 1/2VCC ou uso de fonte simétrica, dá na mesma. Na saída deste amplificador diferencial teremos então a robustez necessária para nossas manipulações, livres das terríveis limitações do TCs. Li em algum ponto da discussão alguém não entender o problema dos fios finos. Em fonte de corrente quanto maior for a resistência maior será a potência consumida. Simples assim. Estamos tão acostumados a fontes de tensão que nos esquecemos desse detalhe nas fontes de corrente. -
Projeto: ajuste de histerese em comparador sem (muito) cálculo
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
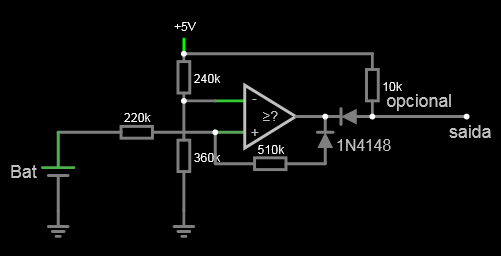
Onde o 2N7000 está não precisa de resistor. Os 10k de pull up e a impedância de saída do comparador são suficientes para o controle seguro desse mosfet. -
Projeto: ajuste de histerese em comparador sem (muito) cálculo
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
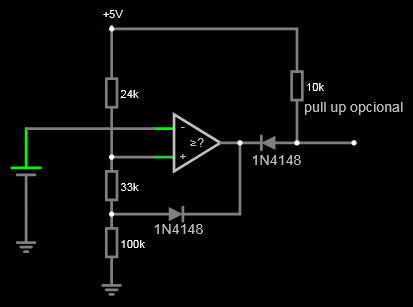
Aquele transistor PNP não vai funcionar nunca. Tem que ser NPN. Ainda acho mais fácil mexer na referência com diodo mas com transistor também funciona.
-
Projeto: ajuste de histerese em comparador sem (muito) cálculo
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
Pode fazer isso também:
-
Posso prender cabos de energia com arames de metal?
Sérgio Lembo respondeu ao tópico de Ygor Ferreira Campos de Sá em Eletrônica
Complementando a excelente resposta do @Andreas Karl . Alta tensão possui regras próprias. Na verdade são fenômenos presentes até mesmo nas baixas tensões mas que só ganham força destrutiva nas altas. Então, coisas que não nos preocupam normalmente fazem grande estrago nas altas tensões. O efeito corona é um deles. Exemplo: nas luminárias tubulares de fluorescentes o suporte plástico de encaixe apresenta esfarelamento após 10 anos de uso. Não invente moda em cabos que possuam 1000V ou mais, é necessário conhecimento específico. Alta corrente alternada também possui suas regras. Quem trabalha em grandes quadros de distribuição de energia não utiliza aliança de casamento, esquenta o dedo. Uma opção para amarração na falta da braçadeira plástica (enforca gato) é o barbante. -
Circuito de Condicionamento de Sinais
Sérgio Lembo respondeu ao tópico de Gabriel Florencio Correia em Eletrônica
@aphawk Caro amigo, quero saber em qual loja se abastece. Também sou de São Paulo e para encontrar operacionais são sempre os mesmos. Para JFET os TLxx da Texas com faixa de trabalho bem distantes do Vdd e Vss. Nos bipolares temos o LM358 e assemelhados e para comparador o LM2904 e assemelhados. De alta performance só vi o LM311 com strobe e consumo de 8mA. De baixo offset o OP07 da Texas mas também com boa distância entre o Vdd e o Vss, ótimo para quem não tem pressa (é lerdo) mas de uma estabilidade térmica invejável. Os rail-to-rail de 2 a 5V só os vejo na Mouser e Digikey mas se o amigo souber de algum buraco da Ifigênia onde os encontre compartilhe aqui.


Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
