

Sérgio Lembo
-
Posts
3.165 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que Sérgio Lembo postou
-

Quais componentes eletrônicos sempre ter em estoque?
Sérgio Lembo respondeu ao tópico de Álvaro Dínamo em Eletrônica
@aphawk Bom dia Paulo. Não havia reparado sobre a cor do capacitor versus categoria de desempenho. Pode esclarecer isso? -
Amplificador vision 2 e vision one: falando sobre eles!!!! Projeto.
Sérgio Lembo respondeu ao tópico de Gilliard centrum em Eletrônica
Toda junção PN é um receptora de luz. Não é a toa que o encapsulamento dos transistores é preto, para bloquear a luz. O photoacoplador é exatamente isso, um transistor comum perto de um led. Quando este acende transistor passa a conduzir. -
Potenciômetro digital para Dimmer
Sérgio Lembo respondeu ao tópico de Anderson.badaui88 em Eletrônica
@Anderson.badaui88 Note uma coisa sobre o X9C: o manual não indica em qual posição o trimpot vem de fábrica. No meu post anterior indiquei que o CS fosse aterrado. Faça isso através de um resistor (pode ser 10k). Se, ao ligar pela primeira vez , a saída for de um valor diferente de zero comande o chip para decrescer o valor até atingir o zero. Com um pedaço de fio conecte por 1 segundo o pino CS ao positivo. Isso fará que o valor atual (zero no nosso exemplo) seja gravado na memória. Boa sorte. -
O último teste: veja se a garantia funciona.
-
Tentou em outra porta SATA ou sempre na mesma?
-
No pé da última imagem há um alerta de erro de comunicação e possibilidade de ser causado pelo cabo. Notou isso?
-
Qual a melhor marca de álcool isopropílico?
Sérgio Lembo respondeu ao tópico de Luan o Leigo do Hardware em Eletrônica
Sobre o uso de álcool para limpeza de celular, tv ou monitor: se entrar líquido dentro da tela vai chorar. Tela se limpa de forma úmida, jamais molhada. Sobre a limpeza de PC: caso não tenha compressor leve-o ao borracheiro mais próximo e faça a limpeza com banho de ar comprimido. -
Qual a melhor marca de álcool isopropílico?
Sérgio Lembo respondeu ao tópico de Luan o Leigo do Hardware em Eletrônica
@.if Desde estudante (faz tempo) usei álcool comum de limpeza. Derrete bem a borra do breu. Fui conhecer o isopropílico quando tive fotolito, é usado na limpeza periódica das lentes. Dependendo da qualidade o álcool comum pode deixar a placa um pouco úmida mas nada que um secador de cabelos não resolva. Ainda tenho muito álcool da minha última compra de isopropílico, uma garrafa de 5 litros adquirida em casa de material para gráficas. -
Qual a melhor marca de álcool isopropílico?
Sérgio Lembo respondeu ao tópico de Luan o Leigo do Hardware em Eletrônica
Desconheço as características do cleaner anunciado. Lembre-se: cleaner significa produto de limpeza que pode ou não ser apropriado à sua aplicação. O álcool isopropílico é excelente para limpeza de superfícies opticas por não fazer manchas de contorno ao secar. Também é bom para limpeza de placas soldadas manualmente por dissolver bem os resíduos de breu e não atacar a pintura da placa e componentes. -
Qual a melhor marca de álcool isopropílico?
Sérgio Lembo respondeu ao tópico de Luan o Leigo do Hardware em Eletrônica
Pureza total não existe. A maioria arredonda os valores. Qualquer pureza => 98% atende e muito bem. -
Potenciômetro digital para Dimmer
Sérgio Lembo respondeu ao tópico de Anderson.badaui88 em Eletrônica
Tem o modelo X9C102/103/104/502 (1k, 10k, 100k, 50k). Este também possui memória mas uma boa leitura do datasheet mostra como contornar o problema. O valor é gravado na memória quando o CS vai para o nível alto. Mantenha o CS aterrado e não haverá gravação, em compensação o chip estará sempre ativo (CS é o chip select). -
Potenciômetro digital para Dimmer
Sérgio Lembo respondeu ao tópico de Anderson.badaui88 em Eletrônica
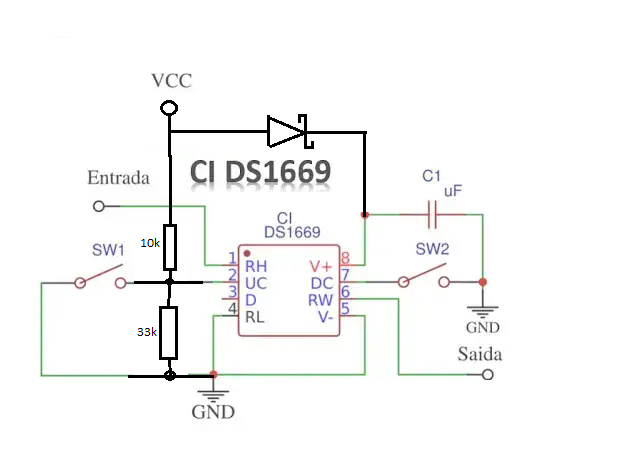
Abaixo uma alternativa 80% pronta. A tática utilizada é manter o circuito energizado pelo tempo necessário para que sua saída zere após o desligamento de VCC. O uso de um diodo que tenha baixo Vf para a corrente de consumo, procure por <= 200mV (faz parte dos seus 20%). O capacitor, que teve seu valor apagado deverá manter o circuito energizado por pelo menos 10s. Busque no datasheet o consumo máximo do CI e a tensão mínima de operação para o dimensionamento do capacitor. Coloque um capacitor de pelo menos 2X o valor calculado (faz parte dos seus 20%). Para uso prático não é um bom circuito, muito mais simples o uso de um microcontrolador controlando a velocidade do circuito.
-
Filtrar ruídos gerados por chuveiro eletrônico
Sérgio Lembo respondeu ao tópico de caolne em Eletrônica
Faça mais um teste: pegue um computador emprestado. na sala em que trabalha refaça a instalação nele e veja se o problema persiste. Outro teste: mesmo tendo cabo blindado teste com outro cabo, mesmo que não seja blindado. Tem que cercar as possibilidades. Mais um teste: abra a caixa de disjuntores e realize um reaperto das fiações. Contato frouxo também causa ruídos, além de aquecimento com altas correntes. -
Filtrar ruídos gerados por chuveiro eletrônico
Sérgio Lembo respondeu ao tópico de caolne em Eletrônica
Já pensou em trocar o cabo USB C que vai do microfone ao computador? No caso a troca seria por um modelo blindado como este aqui. -
Filtrar ruídos gerados por chuveiro eletrônico
Sérgio Lembo respondeu ao tópico de caolne em Eletrônica
Isso significa que o projeto do microfone condensador que tens ou é menos suscetível a interferências ou é melhor blindado. As trilhas da placa eletrônica funcionam como antena, microfones são geradores de sinal de baixíssima potência, o que obriga a existência de um amplificador. Alguns modelos de microfones podem até ser muito bons na qualidade de captação do som mas se a robustez à interferência for baixa o resultado você já conhece. -
Filtrar ruídos gerados por chuveiro eletrônico
Sérgio Lembo respondeu ao tópico de caolne em Eletrônica
@odorizzinho Vamos falar sobre antena. Todo e qualquer metal funciona como antena receptora, inclusive o fio que liga seu microfone ao aparelho. Da mesma forma, todo e qualquer metal eletrificado com tensão alternada funciona como antena emissora. Quando o triac dispara, no fio que fica logo após a tensão sobe abruptamente para o nível de tensão comutada. Se num rádio comum do poucos volts, por exemplo seu WIFI, se consegue uma boa emissão de rádio e usando uma antena pequena imagina um fio variando mais de 200V com o comprimento de fio elevado. Vai longe e com força. Indo para a solução: A fiação entre o controlador e o chuveiro deve ser a mais curta possível. Se possível providencie uma blindagem para essa fiação. Não sei se o chuveiro está direto na parede ou se usa um cano de extensão. Caso use é bom que seja metálico e que a fiação fique alojada na calha metálica, age como blindagem. -
Ligação entre Fonte 12V e Fita de LED
Sérgio Lembo respondeu ao tópico de Ed William Nunes filho em Eletrônica
Olhando as opções de mosfet disponíveis encontrei isso: Por uma ninharia, R$9,00. Diz suportar até 15A sem refrigeração e 30A com refrigeração. Os mosfets são de 40V, uma boa folga para seus 12V de trabalho. Mas há um porém: no circuito sugerido pelos colegas é utilizado a saída de potência do seu módulo. Aqui vai ter que puxar um fio do gate ou, se não quiser fazer isso, montar um pequeno circuito (coisa fácil) inversor que pode até ser uma simples porta lógica que trabalhe nos 12V. Nesse caso seria comprar placa ilhada dupla face (as ilhas não descolam fácil, diferente da face simples) e ligar poucos fios, coisa muito simples. Passaria a ter um sistema modular de 15A cada módulo sem limites de ampliação. Site da Smart Kits -
Montar calculadora simples com CIs
Sérgio Lembo respondeu ao tópico de Luis Henrique Dantas em Eletrônica
@.if Dona Isadora, belíssimo vídeo. Não sei onde encontra essas pérolas mas gostei do presente que nos deu. -
Aterramento para computador existem outras alternativas? Fiz corretamente?
Sérgio Lembo respondeu ao tópico de AlreadyEmpty em Eletrônica
Montou essa máquina agora? Ou antes funcionava bem e passou a dar problemas recentemente? Caso seja problema recente um bom banho de ar comprimido costuma resolver. Faço esse banho na minha máquina anualmente, utilizo o compressor da borracharia próxima. Nunca necessitei de aterramento e sou proprietário de PC desde os tempos do XT, o primeirão (caríssimo). Só vi uso de aterramento em uso industrial, uso doméstico e escritório não. -
Um pensamento que me ocorreu agora: se a ponte retificadora for também uma controladora de corrente o que aparenta ser resistor será então um microindutor, aparência semelhante a um resistor para baixos valores. É o que se usa nos controladores de corrente de baixa tensão e elevada frequência (normalmente acima de 1MHz). Essa verificação é simples: basta medir a suposta resistência e ver se o valor assemelha ao indicado (resistor) ou é próxima de zero (indutor).
-
Complementando o @devair1010 para estoque tem-se o modelo que foi omitido no programa. No enunciado se falou no modelo X mas também vai ter o Y, o Z e outros mais. Nos tamanhos são 4 e não 3 (P, M, G e GG). Para manter o char GG pode ser substituido por E de extra. O C++ cria e modifica arquivos de banco de dados com muita facilidade. Num programa que fiz no passado o estoque era um único banco de dados com os campos modelo, cor, tamanho, quantidade, preço. Ao se inserir um novo modelo se este tivesse 5 cores e 3 tamanhos eram criadas automáticamente 15 linhas no banco de dados, 1 para cada item. Muito mais fácil e prático do que o uso de matrizes pois permite a inserção de quantidade ilimitada de modelos sem ter que alterar o programa, coisa que não ocorre na sua proposta. o programa nasce engessado. Outros recursos como indexação tornam o programa mais interessante ainda. Completinho vai mais de 400 linhas.mas mesmo para pequenos exercícios recomendo o estudo do banco de dados do C++. Bons estudos.
-
C++ Calcular valor total do auxílio que este funcionário receberá
Sérgio Lembo respondeu ao tópico de Caio Fernandes1 em C/C#/C++
Erro simples: está multiplicando. No laço for a verificação de idade se repete tantas vezes quantas for a quantidade de dependentes e em cada uma delas é verificada a idade. Quando a idade for menor if (dependente<18) o valor auxílio deverá ser adicionado em 60.00 auxilio =+ 60.00 que equivale a auxilio = auxilio + 60.00 Boa sorte -
Ligação entre Fonte 12V e Fita de LED
Sérgio Lembo respondeu ao tópico de Ed William Nunes filho em Eletrônica
Se o mercado cobra e paga, se faz o fornecimento. Pergunta: há mesmo a necessidade de ser através desse sensor, não pode ser um controle com potenciômetro rotativo ou linear? Construir um PWM é tão simples, mais simples que as adaptações propostas e te proporcionariam várias saídas de 10A ou mais num único controle com baixíssimo custo. Ou até mesmo adquirir PWM pronto para não ter esse trabalho. -
@MOR_AL Há uns anos me envolvi num projeto com leds, o que me forçou a estudar seus detalhes. De uma forma grosseira os leds de alto brilho equivalem a um zener de 2.8V com um resistor em série que apresenta 0.45V de queda na corrente nominal. A capacidade de sobrecorrente repetitiva é até 33% desde que o Irms não ultrapasse a nominal. Temos então que trabalhar com a tensão de pico acrescida de alguma margem de segurança se usarmos resistores ao invés de um controlador de corrente BCR ou equivalente.
-
Ligação entre Fonte 12V e Fita de LED
Sérgio Lembo respondeu ao tópico de Ed William Nunes filho em Eletrônica
A discussão de como turbinar o dimmer está ótima mas permanece uma questão: destina-se a um espelho onde o usuário estará próximo, não é iluminação ambiente. Muita luz próxima aos olhos incomoda, ofusca, não é desejável. Se o espelho for grande, que se use fita com poucos watts por metro, 36W ou mais de luz próximo olhos do usuário é muita coisa. Replico abaixo a foto com o uso do dimmer.




Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
