

Sérgio Lembo
-
Posts
3.036 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Fabricantes
Livros
Cursos
Análises
Fórum
Tudo que Sérgio Lembo postou
-
Também dá para fazer o comparador de forma discreta e com driver open colector usando apenas 3 transistores e 3 resistores, mas o chip é tão barato que não compensa, além do que oferecem ganho bem mais elevado. Ainda assim é sempre bom conhecer o comparador discreto. As melhorias melhorias colocadas nos comparadores prontos resultam em algumas limitações no uso. Conhecer o funcionamento básico nos dá a possibilidade de montarmos um quando as limitações dos comerciais forem inadequadas ao projeto. É eletrônica básica que sempre vale a pena ser relembrada. Este é mais simples possível, o correto é ter um transistor polarizado como corrente constante no lugar do resistor comum aos emissores de entrada.

-

Fita termo condutora. Onde encontrar?
Sérgio Lembo respondeu ao tópico de rpatriciocarvalho em Eletrônica
Esses aparelhos são tão fininhos... mal tem ar dentro e a ventilação é zero. Posso estar errado, mas acredito que a ideia de se usar um condutor de calor grosso (as citadas fitas) seja transferir o calor para a tampa do aparelho. O material da tampa pode até não ser o melhor dos radiadores, mas tem o mérito de estar em contato com o ambiente externo. -
Acionamento de iluminação driver de corrente?
Sérgio Lembo respondeu ao tópico de ikecal em Eletrônica
O circuito que vi acima é interessante, mas foge ao enunciado da questão. A exigência do driver de corrente nos leva a um LED ou a uma lâmpada de descarga (fluorescente, vapor metálico, sódio). Provavelmente LED, já que os drivers para lâmpada de descarga são mais conhecidos como reatores. O SCR naquela topologia controla quanto muito a tensão, não foi incorporada nenhuma função de corrente. Nem vou perguntar o que o rapaz faz com o relé, procuro ser educado nesse fórum! adicionado 6 minutos depois Dando uma pausa no sarcasmo (me desculpem, não consegui resistir), esse circuito pode muito bem ser o circuito eletrônico que irá acionar o relé, basta colocar a bobina dele no lugar da lâmpada. Boa sorte na escola. -
Acionando bobina do carro com arduino
Sérgio Lembo respondeu ao tópico de Tiago Camana em Eletrônica
Aqui temos 3 possíveis problemas: 1 - Esse mosfet quando alimentado por apenas 5V limita a corrente, o que pode vir a aumentar consideravelmente o Vds quando a corrente passar de 9A. Isso pode explicar e muito o aquecimento dele. 2 - Esse mosfet não foi desenhado para ter uma boa performance com nível lógico, ter 10V no gate é mais a praia dele. Com 10V ou mais (máximo de 20V) vai ter tudo o que ele pode oferecer. Cabe aí um driver para aumentar esses 5V. Isso eliminará a limitação de corrente (sai da região linear dele), passará a ter uma comutação mais rápida. 3 - Esses mosfets consomem um pico de corrente que o Arduino não oferece. Na falta de corrente a transição se torna mais lenta, o que não é bom nesses níveis de corrente, em especial no desligamento, quando a demanda de corrente pelo gate é mais alta e por coincidência a corrente pelo mosfet está no pico. O driver sugerido é do tipo inversor, vai ter que fazer o output do Arduino trabalhar com lógica negativa. Caso não queira mexer nisso, ADICIONANDO um transistor PNP entre Q4 e Q1 deixa o drive NÃO INVERSOR. Na seleção dos transistores, escolha para Q1 um transistor que suporte pico de 500mA e para Q2 uns 800mA. Finalmente, falando sobre a escolha do mosfet que irá chavear a bobina, confesso que desconheço os transientes de tensão que o primário dessa bobina gera, mas se for possível usar um mosfet de tensão mais baixa (esse é de 200V) vai encontrar componentes com Rds 20X mais baixo, correntes de gate mais baixa (menor Qg) e transições mais rápidas sem aumento de custo, talvez até mesmo conseguindo se livrar do dissipador, vai aquecer bem menos. Alguns modelos de tensão baixa tem desempenho tão bom que podem até ser comutados direto pelo MCU sem a necessidade do driver proposto.
-
Esse é o espírito da coisa! Aprendi esse pensamento com um professor de Organização e Métodos: O BOM é inimigo do ÓTIMO. E nesses debates técnicos não só aprendemos mas também damos aula para os que nos leem (e tenho aprendido muito lendo debates dos outros, em especial agora que estou voltando à computação industrial, mais de 20 anos afastado). É o que me faz gostar tanto desse ambiente. Abraços Sérgio
-
3 dessas dá uma hidrelétrica de médio porte. kkkk É muita palhaçada.
-
Acionamento de iluminação driver de corrente?
Sérgio Lembo respondeu ao tópico de ikecal em Eletrônica
Para entender o conjunto, tem que entender os elementos que formam o conjunto. LDR: é um resistor que tem seu valor variado pela incidência de luz. É necessário um circuito eletrônico que leia essa variação para acionar a bobina do relé. Relé: contatos elétricos que são acionados por uma bobina elétrica. Driver de corrente: Transforma a tensão constante da rede pública em corrente constante. É o que se usa para acender leds.
-
@MOR , aquele R3 em série com RF para elevar a tensão, sei lá. Esses operacionais com PNP na entrada aceitam modo comum a partir do ground, muitos deles até mesmo a partir de Vss -0,3V. Ao levantar a tensão de realimentação com essa técnica, a variação de tensão sobre o shunt que será lida pelo operacional diminui, exigindo mais db do operacional. Se R3 = RF isso vai dar a metade, consequentemente exigindo o dobro de ganho do operacional para a mesma estabilidade. Adicione-se a isso que o off-set de entrada e deriva térmica passam a ter o dobro de efeito, se bem que nessa aplicação tais efeitos são negligíveis. Sobre fazer o set point em 1000:1, taí um osso duro. Partindo do princípio que a precisão é dada em porcentagem e não em valores absolutos, será que o uso de um potenciômetro logarítmico não nos daria esse controle em décadas? Na falta dele, o uso de um resistor entre o cursor e a extremidade do potenciômetro linear tb nos dá uma curva de resposta bem interessante. Isso talvez elimine a necessidade daquelas chavinhas ou diminua a quantidade delas. adicionado 19 minutos depois Sobre o primeiro comentário, uma relação entre R3 e RF que levante uns pouquíssimos mV a leitura do shunt talvez seja interessante para criar uma zona morta no início do potenciômetro e matar um off-set sacana do AO. Sendo um levante bem discreto, a atenuação do shunt será mínima.
-
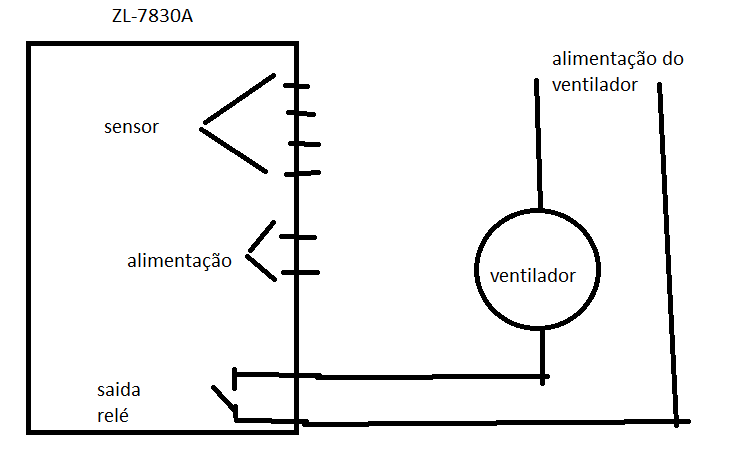
Veja o seu aparelho como sendo o interruptor que acende a luz da sua sala. Se você está esperando que as 2 saidas do aparelho alimentem sua ventoinha a partir da energia que alimenta o funcionamento dele vai se decepcionar. Precisa de energia externa.
-
Projeto, cálculo e exemplo de um comparador inversor com histerese
Sérgio Lembo respondeu ao tópico de MOR_AL em Eletrônica
Circuito e desenvolvimento matemático perfeitos e factíveis e muito usados na aplicação prática. Com tanta coisa para dizer (deve ter gasto boas horas montando a explicação) faltou esclarecer aos iniciantes que Vo_ma e Vo_mi são os níveis de saturação positiva e negativa do operacional a serem encontrados nos datasheet do operacional selecionado, varia com o modelo e tb do Vcc que o alimenta. Aproveito para agradecer ao @MOR pela generosidade com que publica seus artigos, Testando Indutor ou um Enrolamento de Transformador em Fontes Chaveadas faz parte da minha biblioteca. -
Bonito o aparelho. Coloque o esquema elétrico que montou para que possamos identificar o erro de montagem.
-
Já vi uma máquina de 15 toneladas com 20 metros de comprimento ser rotacionada por um único homem usando uma só mão. É claro que o movimento se iniciou bem lentamente, que no início teve que usar as 2 mãos e aplicar bastante energia, mas para manter o movimento foi moleza, o ponto de giro era muito bem lubrificado. Esse exemplo mostra que é possível se movimentar grandes cargas no mesmo plano com pouco esforço. Outro exemplo mais fácil de se visualizar é uma mulher de 60kg empurrando um carro de 700kg no plano. Com rodas ela leva fácil, sem rodas o atrito é muito grande e nem um forte homem consegue mover. Para completar o nó na sua cabeça tem a questão do desempenho. Pense numa roda de bicicleta com pneu montado e o peso de musculação de mesma massa que a roda. O peso é pequeno e a massa muito próxima do centro de giro. Na roda a massa é mais de 80% concentrada na periferia do objeto que tem um diâmetro considerável. O esforço para se girar essa roda é algumas dezenas de vezes maior que o peso de musculação que tem a mesma massa, isto é, até a geometria influencia na sua resposta. Procure por Cinemática e conjugado de corpos rígidos, isso dá pano pra manga. adicionado 10 minutos depois Uma forma covarde, mas que nos dá resposta sem estudo é tratar esse movimento lateral como se fosse movimento suspenso. Se tem força para suspender o bicho, fazer de ladinho (no mesmo plano) é fácil fácil. ha ha ha
-
Houve um salvamento acidental enquanto eu escrevia e você respondeu sobre uma explicação parcial, leia o material completo. adicionado 33 minutos depois Na verdade um pouco menos do que isso, se prestar bem atenção no que foi dito. Sua conta não levou em consideração o comprimento do braço. Detalhe é tudo em ciências exatas.
-
Sim, se usar tração direta serão 375g de capacidade de carga na ponta do braço, desde que o braço tenha massa = 0g. Por qual razão acha que se usa redutora? Um motor DC costuma ter rotação nominal a partir de 2000rpm, e olha que nesse valor não é fácil de achar. Mais fácil achar de 3000 a 7000rpm. Em 3000 rpm tem-se 50rps (rotações por segundo) ou 1 rotação a cada 20ms. Num movimento de 90º isso dará 5ms. Pretende mesmo ter movimentos tão rápidos e de forma controlada? Isso até existe, tenho uma máquina antiga (+ de 15 anos) de gravação a laser que faz isso com controle de posicionamento de micro-radianos a 4750rpm. Raciocinando dessa forma você está começando sua casa pelo telhado. Comecemos pelo torque. Se torque significa força tangencial aplicada num comprimento, por se tratar de carga a ser suspendida, temos que conhecer a carga, o peso do braço que irá acionar e o comprimento do braço. Isso nos dará o torque necessário no eixo que irá suspender essa tralha toda. Então, se o braço vier a pesar 2kg linearmente distribuídos ao longo dos seus 80cm isso equivale a 2kg concentrados na ponta de um braço de 40cm que é igual a 1kg concentrado na ponta de um braço de 80cm. Como já sei que não será linear, haverá uma concentração de peso na ponta por conta das garras, vou considerar que esses 2kg distribuídos não linearmente seja igual a 1,5kg concentrado na ponta de um braço de 80cm. Somando-se a isso os 0,5kg de carga a ser suspendida, passo a ter o equivalente a 2kg concentrados na ponta de um braço de 80cm = 160kgf/cm de torque (primeira necessidade definida). Perceba que até agora só falei das necessidades, pois são elas que definem o perfil de qualquer projeto. Vamos agora ao desempenho, que no nosso caso significa a velocidade com que será feito o movimento. Ter uma alta velocidade vai rachar seu MDF no primeiro movimento. Até mesmo uma estrutura metálica empena se o movimento for muito brusco. Vou adotar 8s para um movimento de 90º. Isso nos dará 32 segundos para uma rotação completa = 1,875rpm. (segunda necessidade definida). Pronto, agora sabemos do que precisamos: 1,875rpm com 160kgf/cm de torque. Até existem motores que conseguem te dar essa baixa rotação com esse torque, são os de passo. Só que todo esse torque não sai barato e é irracional adquirir um motor para utilizar menos de 1% de sua potencia. Vamos então usar um conjunto motor e redutor. Falaste de um modelo de servo motor, estou sem saco para consultar o datasheet. Vou adotar um motor de 3000rpm. Se o motor me dá 3000rpm e só quero 1,875rpm preciso de uma redutora 3000:1,875 = 1600:1 com torque de saída mínimo de 160kgf/cm. O torque mínimo do motor = torque necessário na carga / redutora / rendimento da redutora. Para uma redução de 1600:1 vou chutar uns 30% de rendimento. Substituindo: torque_motor = 160kgf/cm / 1600 / 0,30 = 0,333kg/cm. Nota: Quase todos os valores aqui foram adotados, vai ter que substituir pela sua realidade para ter os valores corretos.
-
A forma mais simples de se calcular o torque mínimo que será exigido na primeira articulação é somar o peso do braço inteiro ao da carga máxima (em kg) e multiplicar pelo comprimento do braço (em cm). Isso irá te dar um valor (em kg/cm) de uns 60% acima do cálculo correto feito peça por peça, mas é rápido. Um cálculo mais fino leva horas, é feito peça a peça onde até mesmo a geometria do componente é considerada. Note que já usei a unidade que será usada no torque desses motores pequenos (kg/cm). Considere o uso de motor de passo, se usar servomotor vai necessitar de um controle de posicionamento em tempo real. Com o de passo o controle é bem mais simples, basta um ponto de aferição. A curva de torque do motor de passo tb me parece ser mais interessante.
-
Outro Lendo o ADC com qualidade no AVR
Sérgio Lembo respondeu ao tópico de Sérgio Lembo em Microcontroladores
A regra é clara!!! Os resultados desse tópico estão saindo bem melhor do que a encomenda. Estava lendo sobre oversampling quando veio esse último post. -
Outro Lendo o ADC com qualidade no AVR
Sérgio Lembo respondeu ao tópico de Sérgio Lembo em Microcontroladores
Atmel ATtiny4 / ATtiny5 / ATtiny9 / ATtiny10 [DATASHEET] O documento é comum a todos esses modelos. Se, com menos recursos, já são 207 páginas achei melhor estudar os outros depois de entender esses. Lendo o manual, artigos e tópicos, notei um procedimento padrão: além de setar as portas, os acessórios da CPU (ADC, timer, comparador) tb possuem uma rotina de configuração e de utilização dos flags bem semelhantes entre si, o que cria um padrão. Ao se entender e decorar um praticamente já se entendeu a forma de trabalho dos demais, só mudam as peculiaridades do acessório. Isso me interessou, e como! Mas creio que houve uma distração quando digitou o texto. Não teriam sido milivolts? Microvolt é osso em qualquer condição. De qualquer forma, ter sensibilidade para milivolts já me dará uma boa sensação de ter o controle na mão. -
A resposta disso começa pelo estudo de mecânica. Definidas as necessidades, basta escolher o motor com o torque que te dará o desempenho. Comecemos pelo atrito. Temos o estático e o dinâmico, que costuma ser bem menor que o estático. Se não vencer o estático, a peça nem inicia o movimento. Se for uma produção em massa, vale a pena fazer um estudo sério e demorado sobre isso. Caso seja peça única ou baixa quantidade, sobre-dimensionar sai mais em conta. No caso do seu trabalho, uma redutora rosca-sem-fim entre o motor e o movimento é aconselhável. O interessante dessa redutora é a característica unidirecional, isto é, o motor consegue girar o conjunto mas o conjunto não consegue girar o motor. Sem esse recurso, a própria foto mostra o desastre que se anuncia: o peso do braço fará com que ele desça ao se desligar o motor. Um exemplo bem sucedido desse recurso é o elevador de carro que tem nas oficinas. O peso do veículo não consegue fazer o elevador descer, é necessário ligar o motor para se ter qualquer movimento. As talhas de corrente são outro bom exemplo. Supondo que o motor venha a ter um torque de 1kg/cm e a redutora seja de 3:1, considerando que o rendimento dela é em torno de 60% o torque na saída será 1kg/cm x 3 x 0,60 = 1,8kg/cm com 1 terço da rotação de saída do motor.
-
A área de TI é tão horrível assim ?
Sérgio Lembo respondeu ao tópico de Henrique Schinaider em Estudos e mercado de trabalho
Trabalhei numa empresa austríaca na minha juventude. Para ver o gringo vermelho de irritação bastava colocar o mais ou menos na resposta. Não existe mais ou menos, não existe meia grávida, ou é ou não é! De início, na minha juventude sem experiência, achava esse comportamento radical, nazista. Em pouco tempo trabalhando com eles compreendi o mérito dessa forma de trabalhar. A execução das tarefas se torna mais lenta, é verdade. Mas também é verdade que ela acaba sendo executada uma única vez, não há necessidade de retrabalho num processo de várias etapas quando todas elas são bem executadas. -
Outro Lendo o ADC com qualidade no AVR
Sérgio Lembo respondeu ao tópico de Sérgio Lembo em Microcontroladores
Se os 60Hz já zoam a qualidade, como é que se consegue fabricar inversores de motor microprocessados? O di/dt dos IGBTs em inversores de 20Hp ou mais provocam fortíssima indução. Meu centro de estudos está sendo focado em SMPS onde terei 1 ou 2 indutores sendo chaveados, vai ser ambiente poluído. A intenção é fazer uso de chips especializados no comando dos mosfets e de microcontroladores no gerenciamento do comportamento da potencia, o que implicará na leitura do que está acontecendo e na produção dos valores de referência que serão utilizados pelos CIs especializados, se bem que tem aumentado e muito os CIs que fazem esse controle analógico com comunicação I2C para entrada de parâmetros. Ainda sobre a poluição dos sinais, penso se fazer uma caixinha metálica no ambiente do microprocessador não nos daria uma gaiola de faraday. Esse pensamento é inspirado nas caixinhas metálicas que tem nas plaquinhas de celular. adicionado 14 minutos depois única parte que não não concordo e também não discordo ^^ depende do que eu ele quer... para começar tá ótimo... Escolhi os menores para estudo em razão de terem menos coisas. Certamente partirei para os de maiores depois de ter domínio, mesmo que parcial, sobre os menores. É apenas como método de estudo. -
Outro Lendo o ADC com qualidade no AVR
Sérgio Lembo respondeu ao tópico de Sérgio Lembo em Microcontroladores
@Bommu Perneta , o que consegui encontrar até agora sobre a precisão do ADC embutido no microcontrolador, e isso inclui seus comentários, falam dela de forma conceitual mas não entram em valores. Em valores absolutos, isto é, quantos % de erros de linearidade se tem nessa ou naquela forma, erros de ganho, off-set, etc. Já viu algum material a respeito para que o projetista possa balizar melhor suas escolhas? -
Outro Lendo o ADC com qualidade no AVR
Sérgio Lembo respondeu ao tópico de Sérgio Lembo em Microcontroladores
AVR sem dúvida é um dos mais fáceis... sem do ST por exemplo mas são terríveis para novatos Não entendi essa parte da resposta (em negrito). BOa sorte lol uhahuauhahuauhauha Nesse quesito somo iguais: perco o amigo mas não perco a piada! rs Retirado do datasheet do ATtiny4 / ATtiny5 / ATtiny9 / ATtiny10, pagina 126 http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-8127-AVR-8-bit-Microcontroller-ATtiny4-ATtiny5-ATtiny9-ATtiny10_Datasheet.pdf 14.8. ADC Noise Canceler The ADC features a noise canceler that enables conversion during sleep mode to reduce noise induced from the CPU core and other I/O peripherals. The noise canceler can be used with ADC Noise Reduction and Idle mode. To make use of this feature, the following procedure should be used: 1. Make sure that the ADC is enabled and is not busy converting. Single Conversion mode must be selected and the ADC conversion complete interrupt must be enabled. 2. Enter ADC Noise Reduction mode (or Idle mode). The ADC will start a conversion once the CPU has been halted. 3. If no other interrupts occur before the ADC conversion completes, the ADC interrupt will wake up the CPU and execute the ADC Conversion Complete interrupt routine. If another interrupt wakes up the CPU before the ADC conversion is complete, that interrupt will be executed, and an ADC Conversion Complete interrupt request will be generated when the ADC conversion completes. The CPU will remain in active mode until a new sleep command is executed. Note: The ADC will not be automatically turned off when entering other sleep modes than Idle mode and ADC Noise Reduction mode. The user is advised to write zero to ADCRSA.ADEN before entering such sleep modes to avoid excessive power consumption. Com o clock do ADC em 50kHz e sabendo que a leitura consome 13 clocks, terei a leitura em 260us. Somando-se a isso a execução dos comandos que preparam a leitura, de 270us não passa. Na maioria das vezes pode-se conviver com isso. Em princípio não vejo vantagem em se ter alta performance de processamento se as leituras na qual a decisão será tomada for de baixa qualidade. Nesse caso teremos decisões de baixa qualidade em alta velocidade. Qual a vantagem disso? -
A área de TI é tão horrível assim ?
Sérgio Lembo respondeu ao tópico de Henrique Schinaider em Estudos e mercado de trabalho
Nesses 2 últimos anos o mercado ficou ruim para todos, mas vai passar, não se preocupe. Sua área tem grande procura em períodos de expansão econômica. Tenho 59 anos e o Brasil sempre foi essa gangorra, basta um político populista (e pouco importa se é de direita ou esquerda) alcançar o poder e o resultado é sempre esse que colhemos agora. Mesmo sendo de outra área (eletrônica), o problema do iniciante é sempre o mesmo. Algumas atitudes que sempre são notadas e ajudam a decolar: Seriedade e responsabilidade: Nada de fazer as coisas nas coxas, na dúvida sempre pergunte. Também não é necessário se preocupar com o state of the art, pois qualidade não significa ser o supra sumo. Qualidade é o conjunto de características que suprem uma necessidade. Nunca ter vergonha de perguntar: Se uma orientação de serviço, explicação, conversa técnica ou qualquer outra formas de comunicação estiver em progresso e durante este for um usado um termo ou conceito que lhe é total ou parcialmente desconhecido, interrompa e pergunte o que é aquilo. Talvez alguns colegas jovens, por falta de experiência, venham a te zoar. Não ligue, quem estiver falando sentirá que você realmente está prestando atenção no assunto, te dará a explicação necessária e te respeitará por essa atitude. Aprende-se mais nessas perguntas aos mais experientes do que nos bancos de escola. Atualização permanente: Obrigue-se a comprar livros técnicos todos os anos, fóruns como este tb são muito úteis A internet ajuda bastante mas a livraria tem o seu valor. Não é bem assim, tapinha nas costas não paga supermercado. Com atitudes positivas, destacar-se na área é consequência natural. E nunca se esqueça que ninguém é insubstituível, isso vale tanto para você quanto para o seu patrão. -
Leste o datasheet desse diodo? É do tipo shottky, tem tensão de avanço de apenas 0,3V além da velocidade. Se diodo de uso geral (1N4007) desse conta o fabricante não teria gasto nisso. http://pdf1.alldatasheet.com/datasheet-pdf/view/14656/PANJIT/BAT54C.html
-
Fios com Listra colorida
Sérgio Lembo respondeu ao tópico de Luiz Gustavo Folador Mende em Eletrônica
@Luiz Gustavo Folador Mende , me desculpe falar o óbvio, mas é tudo uma questão de viabilidade econômica, ninguém trabalha para perder dinheiro. - O lojista não vai comprar no que não tem saída. - Como consequência do item anterior, o fabricante só vai produzir fio com capa zebrada por encomenda, o que implica em lotes consideráveis. Se precisa de uns poucos metros, não consegue nem ganhar um bom dia do vendedor. Se for uma quantidade média (uns 100kg), talvez ele consiga te encaixar naquilo que já é produzido para atender um cliente de porte. Fabricantes de fios no Brasil tem vários, é tudo uma questão de quantidade. Espero ter ajudado.






Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais
