

Sérgio Lembo
-
Posts
3.165 -
Cadastrado em
-
Última visita
Tipo de conteúdo
Artigos
Selos
Livros
Cursos
Análises
Fórum
Tudo que Sérgio Lembo postou
-
Partida direta em motores potentes provocam grandes picos de corrente, daí o recurso delta-estrela. Sobre dar partida direta em motores potentes, tudo bem para o motor, Quem tem que suportar é a instalação elétrica. Se esta não suportar muita corrente a queda de tensão provocada pela corrente inrush pode provocar desarme de contatores e relés auxiliares do quadro de comando.
-

Como amplificar a corrente na saíde do LM358 sem alterar a tensão?
Sérgio Lembo respondeu ao tópico de rmlazzari58 em Eletrônica
O projeto nasce errado. Com 10ºC já teremos alguma corrente na ventoinha. Quer mesmo refrigerar estando frio? A forma correta é: A partir de qual temperatura a ventoinha começa a trabalhar? Em qual temperatura alcança 100%? A partir daí o projeto inicia com uma referência de temperatura abaixo da qual a ventoinha se mantém desligada. Acima dessa referência uma amplificação da diferença para atingir 100% na temperatura máxima. Será necessária algumas modificações para se usar um transistor PNP na saída. No projeto deve se lembrar que tanto o modo comum das entradas do operacional quanto as tensões máximas de saída possuem limites. A realimentação deverá ser dividida para viabilizar o projeto. Creio que será necessário um operacional dual. -
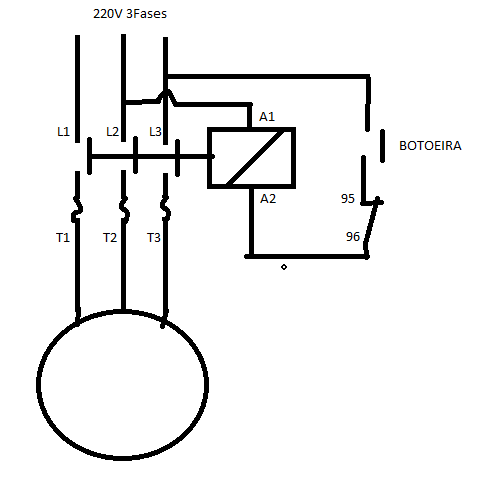
Não é difícil. Encaixe o relé térmico na saída do contator (parte inferior) e siga o esquema abaixo. A1 e A2 representam a bobina. No dial do relé ajuste para a corrente que está anotada na placa do motor.

-
Componente eletrônico para projeto de luminária
Sérgio Lembo respondeu ao tópico de Guilherme Ferrari em Eletrônica
A parte elétrica/eletrônica da lâmpada é apenas uma parte do desafio. A outra é a dissipação de calor. Supondo que a luminária tenha 3W, serão 3W de calor a ser dissipado. O led não gosta muito de calor, passou de 85ºC já era! -
Esquema de projeto de lanterna para camping
Sérgio Lembo respondeu ao tópico de Marcelo_Biker em Eletrônica
Se não for camping selvagem, for daqueles organizados com energia, sem duvida. Mas para quem tem 110V tem as lâmpadas comuns. O interessante da fita é que dá para espalhar no comprimento do teto, não fica a luz concentrada num só ponto provocando fortes sombras e ofuscamento. -
Onde pode ser encontrado o níquel nas baterias de Lítion?
Sérgio Lembo respondeu ao tópico de O Pequeno Príncipe em Eletrônica
O níquel apresenta um bom contato e uma boa resistência à oxidação. É usado como material de acabamento para possibilitar um bom contato nos polos da bateria. Não participa da reação química. -
Quanto de corrente vai precisar nos 3,7V? Pela tensão parece que deseja recarregar baterias de íon lítio. Não é dessa forma.
-
Posso usar filtro de linha para ligar geladeira e fogão?
Sérgio Lembo respondeu ao tópico de TheWeelman97 em Fontes e energia
Filtro de linha é para a proteção dos delicados aparelhos eletrônicos contra picos de tensão na rede. Motores elétricos e faiscadores de fogão não sofrem danos com os surtos. Será interessante para a geladeira somente se esta for uma dessas computadorizadas, com display na porta e outras frescuras. Para as normais é besteira. -
Lâmpadas LED não funcionam e tem fase passando.
Sérgio Lembo respondeu ao tópico de Julio Pestana em Eletrônica
Sua teoria não esta errada. O neutro do bocal de lâmpada terá a mesma tensão e desempenho do neutro da tomada se, e somente se, a ligação entre os 2 pontos estiver boa. Este raciocínio também vale para a fase. Estando o fio partido ou com a emenda frouxa ou qualquer outra intercorrência é o bastante para o bom funcionamento ir pro saco. A causa mais provável e mais fácil de pesquisar é o interruptor. Junte os fios e veja se a lâmpada acende. -
Esquema de projeto de lanterna para camping
Sérgio Lembo respondeu ao tópico de Marcelo_Biker em Eletrônica
Todas as ideias e intenções são um desastre quando se considera a intenção, a trabalheira e a robustez necessária. Diz no título que se destina ao camping. Não é a melhor das situações, não dá para comparar um telhado com uma lona fina. Esqueça as pilhas de lítio. Vão se descarregar rapidamente para as suas necessidades e a adequação das características dessas pilhas para iluminação por led exigem um investimento desproporcional ou a execução de eletrônica para a qual não está habilitado. Para iluminação de camping uma pequena bateria de 12V e fitas de led de 12V formam o melhor conjunto. Existe até lâmpada de 12V se preferir este formato. Como infiltração de água é um problema constante no camping procure pelas fitas envoltas com proteção de silicone. Caso deseje dimerizar compre um controlador de PWM de 12V e coloque-o entre a bateria e os leds, simples assim. Aproveite e compre um conversor step down para gerar os 5V e com isso recarregar os celulares da turma. -
Esquema de projeto de lanterna para camping
Sérgio Lembo respondeu ao tópico de Marcelo_Biker em Eletrônica
Sobre o aquecimento dos leds: e inevitável. Se tiver uma lâmpada LED de 5W terás 5W de calor para dissipar ou o LED vai pro saco. Para isso se utiliza placa de circuito impresso de alumínio. Existem algumas pré impressas para LED a venda. Ligar os LEDs é simples, o desafio é o calor. -
Diferenciação entre "byte normal" e sinal-magnitude
Sérgio Lembo respondeu ao tópico de MarceloGomes em Eletrônica
Como a @.if bem disse na linguagem de alto nível existe o número negativo pela interpretação do bit mais elevado. No baixo nível (assembler) não existe a interpretação do negativo mas o Status register indica quando o resultado de uma operação é <0. No entanto uma soma ou subtração com números unsigned ou com números signed conseguem ser realizadas pela ALU do processador porque os resultados na leitura binária são os mesmos. Muda apenas a interpretação numérica que será feita pelo software testando o bit mais alto quando a variável estiver marcada como signed. Veja a régua de interpretação feita pelo software para uma palavra de 8 bits (char): binário 0000 000 0111 1111 1000 0000 1111 1111 unsigned 0 127 128 255 signed 0 127 -128 -1 Uma demonstração prática: 1110 0111 representa -25 e 231 (signed / unsigned) 0000 1010 representa 10 e 10 (signed / unsigned) 1111 0001 é a soma binária e representa -15 e 241 (signed / unsigned) -
Gostaria de saber quais equipamentos utilizam Solda Lead Free
Sérgio Lembo respondeu ao tópico de O Pequeno Príncipe em Eletrônica
Na embalagem de muitos produtos se houver alguns destes textos: ROHS Pb free Pb dentro de um circulo com faixa transversal, tal qual placa de transito. -
Contador Síncrono utilizando flip flops tipo D
Sérgio Lembo respondeu ao tópico de Nathan543 em Eletrônica
Tem um erro no circuito: falta o resistor em serie com os LEDS. Verifique no datasheet a corrente máxima de saída do flip flop. Escolha para o LED uma corrente inferior e calcule o resistor. -
Projeto de inversor de 12V para 127V.
Sérgio Lembo respondeu ao tópico de Junior Emerick em Eletrônica
Vamos fazer contas: 12V x 150Ah = 1800Wh Não se deve descarregar totalmente uma bateria, estraga. Descarga máxima de 80% para evitar danos. 1800Wh x 80% = 1440Wh Com 7h de trabalho -> 1440Wh / 7 = 205Wh Potência da resistência: 340W 205W / 340W = 60% Se na ciclagem de liga/desliga do termostato o tempo ligado for <=60% a bateria de 150Ah dá conta. Fazer o primeiro aquecimento do dia através de uma fonte externa vai te ajudar. Manter o aquecimento durante sua hora de almoço com fonte externa também ajudará. Tem que ser estacionária, não utilize a automotiva. -
LCD com informação dos sensores usando dois arduinos
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
Não te entendo. O centelhamento do cilindro é o resultado do cálculo. Deseja calcular o ponto a partir do resultado? Na verdade o que precisa é saber a posição do pistão, o que se faz a partir da posição do virabrequim e se está no primeiro ou terceiro tempo, isto é, entre o ponto de leitura e o virabrequim deverá haver uma relação de 2:1 para distinguir o primeiro do terceiro tempo. Como no comando de válvula já existe esta relação é nela que se busca a informação. -
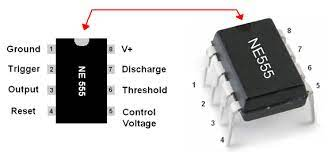
Nebulizador usa ultra-som, frequência baixa. Provavelmente a peça que encontrou serve. Muito provavelmente o circuito eletrônico tem um NE555, o oscilador que comanda o piezo. A tensão no NE555 é a que vai para o piezo. Meça a tensão entre os pinos 1 e 8. Veja o código da peça que encontrou.
-
LCD com informação dos sensores usando dois arduinos
Sérgio Lembo respondeu ao tópico de GustavoH93 em Eletrônica
Caso o passo de 1 dente seja suficiente para marcar a precisão necessária já se tem nas rodas dentadas um encoder de passagem. Falta apenas o led e o receptor. Dá até para usar o TCR5000 (fácil de achar). A saída dele varia significativamente com a distância do objeto, leia o datasheet. Para o ponto zero creio que um ímã + hall na primeira polia seja o mais adequado. -
Para led qualquer 200Hz dá conta. Alta frequência somente se desejar fazer filmagem com a luz. Esse aquecimento se deve as perdas de transição na comutação. Baixando para 200Hz a frequência as perdas de transição cairão 95%, simples assim. Caso deseje manter a alta frequência terá que melhorar o circuito que aciona o mosfet.
-
Circuito para desconectar bateria ao ligar na tomada
Sérgio Lembo respondeu ao tópico de Lucca Rodrigues em Eletrônica
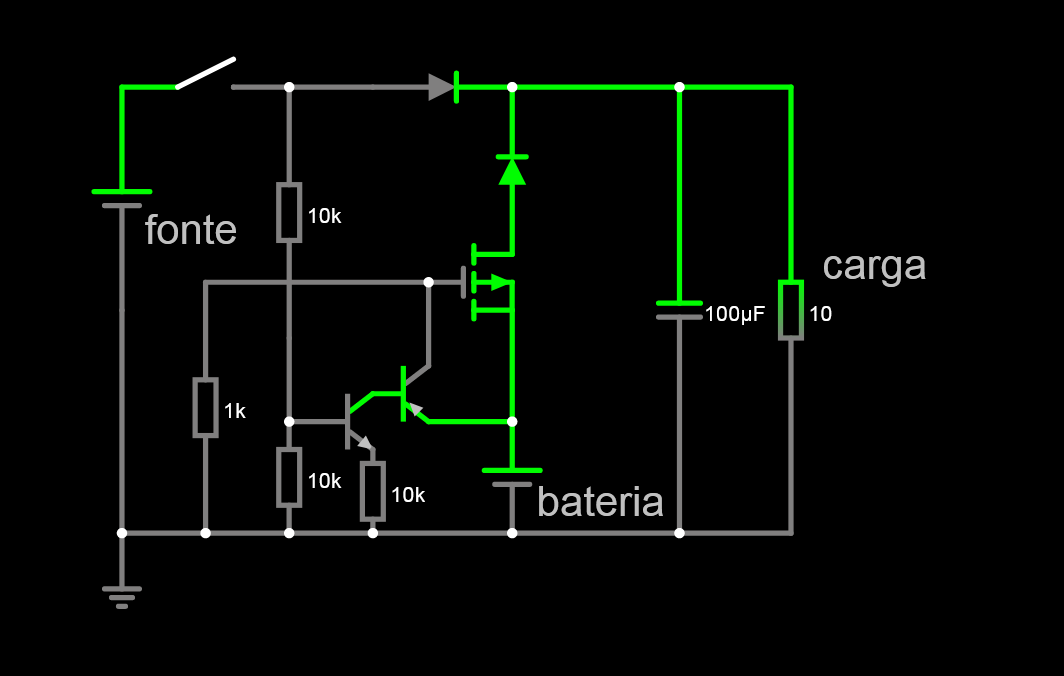
O resistor de 1k mantém o mosfet canal P polarizado. Quando a fonte entra os transistores BJT despolarizam o mosfet. Note que o capacitor de saída deverá ter capacidade suficiente para manter a carga durante a transição da queda da fonte. Até que o mosfet entre serão alguns us. Também é possível colocar um transistor PNP no lugar do mosfet mas tem um problema: a corrente de base. Dependendo do consumo terá que utilizar transistores de potência e o ganho deles é baixo nas altas correntes. Isso implicará na diminuição do resistor de 1K, ou seja, o circuito vai aquecer bastante. Mas se a carga for de baixa corrente, até 100mA, dá para trabalhar com bipolares sem grandes aquecimentos.
-
Como diminuir a tensão aplicada nos LEDS
Sérgio Lembo respondeu ao tópico de Steaumpunk em Eletrônica
O controlador da lâmpada é de corrente constante e faz a leitura através do resistor 1R5 que destacou na foto. Caso troque o resistor para 3R a lâmpada passará a ter a metade da iluminação. Se trocar por 2R passará a ter 75% da iluminação. -
@Tito Fisher Em vista do elevado rendimento das resistências elétricas nas temperaturas abaixo de 400ºC creio que só se ganha algo quando reaproveitamos outras fontes de calor que seriam perdidas ao ambiente. A eficiência do processo indutivo que pretende explorar é relativa a outros métodos, de forma individual tem elevadas perdas. Já assisti vídeos onde uma bobina de elevada potência promovia aquecimento superficial de um eixo que era rapidamente resfriado e ganhava têmpera. Com o uso de gás teríamos o problema de queima de carbono da liga. O gás também tem o problema de calor perdido nos gases queimados. Com o uso de indução no exemplo acima se consegue selecionar se teremos aquecimento no corpo inteiro ou mais localizado na superfície. Quanto maior a frequência mais superficial fica o aquecimento, não circula corrente no interior em altas frequências. O uso do aquecimento por indução só supera o método resistivo em situações onde a resistência não consegue trabalhar pois a indução passa fácil dos 1000ºC e as resistências não trabalham nessa temperatura.
-
Cara, eu não sabia que a refrigeração por gás era tão eficiente assim. Gostei da notícia. Das ideias postas a melhor de todas foi o reaproveitamento do calor da água usada no pré-aquecimento da água nova. O uso do calor dos radiadores de ar condicionado é de duplo aumento de eficiência pois os radiadores arrefecidos por água rendem melhor que os ventilados aumentando a eficiência do ar condicionado em cerca de 60%, não é pouco.
-
Como substituir esse rele por outro componente com a mesma função?
Sérgio Lembo respondeu ao tópico de asplhas em Eletrônica
Esse tipo de teoria só pode ser aproveitada em situações bem controladas. Numa fonte de tensão chaveada com proteção de sobre-corrente embutida no controlador funciona bem. Caso a fonte seja um conjunto de baterias o contato vai colar e a fiação vai fritar. Da forma como a proteção foi posta dá a falsa impressão de segurança que pode ser aplicada em qualquer situação. Tem que suprimir D1 para um desligamento mais rápido. Caros amigos, só aproveitem a ideia do circuito depois de observar bem o texto grifado. -
Como substituir esse rele por outro componente com a mesma função?
Sérgio Lembo respondeu ao tópico de asplhas em Eletrônica
A primeira coisa a fazer é determinar a corrente máxima que pretende permitir ao circuito. Outra coisa: o circuito irá limitar a corrente ou deve memorizar o evento e com, isso manter a saída desligada até que seja dado um reset?



Sobre o Clube do Hardware
No ar desde 1996, o Clube do Hardware é uma das maiores, mais antigas e mais respeitadas comunidades sobre tecnologia do Brasil. Leia mais
Direitos autorais
Não permitimos a cópia ou reprodução do conteúdo do nosso site, fórum, newsletters e redes sociais, mesmo citando-se a fonte. Leia mais